
智能无人装车系统的智能小车及其位移控制方法.pdf

是飞****文章

1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

智能无人装车系统的智能小车及其位移控制方法.pdf
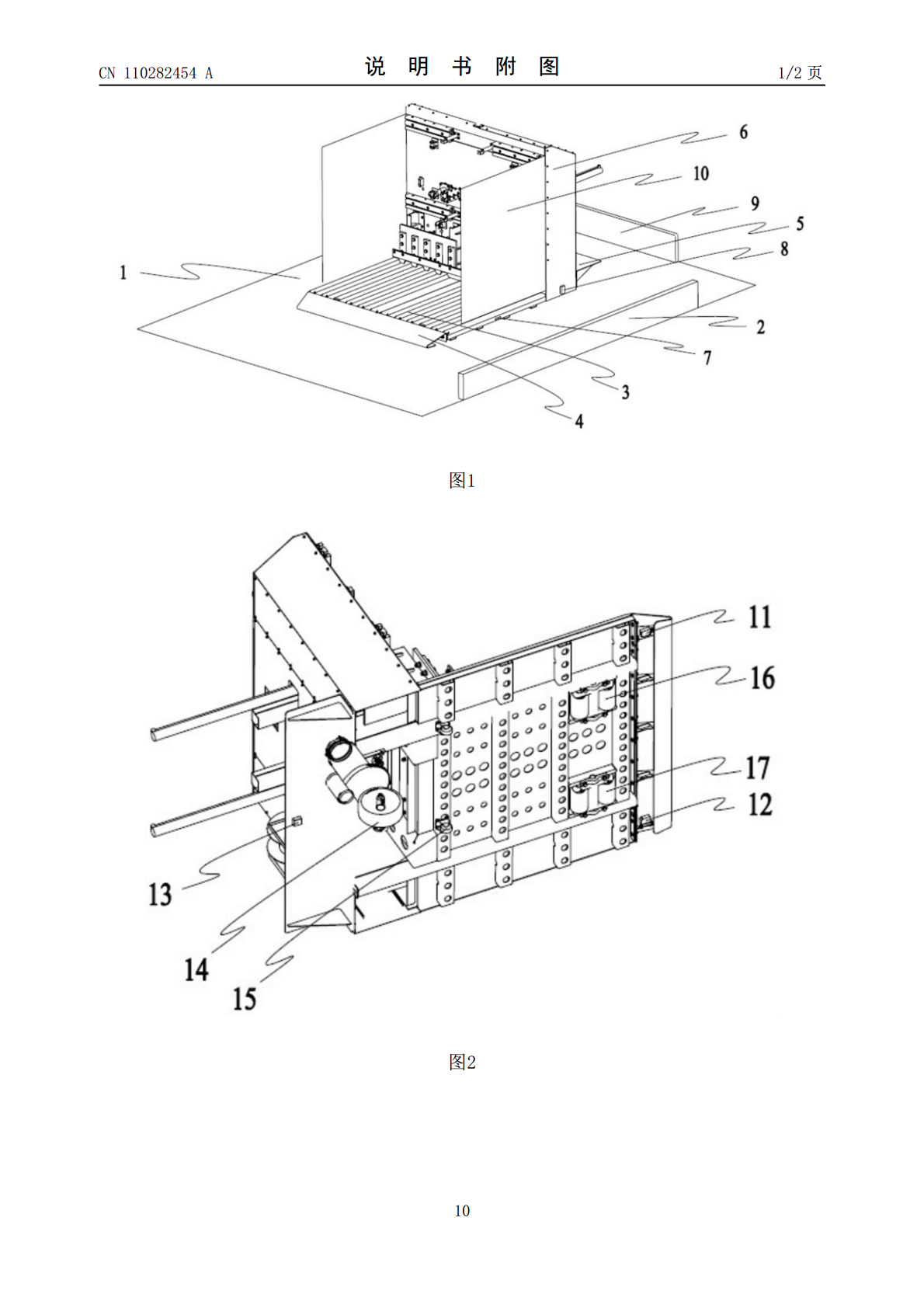
本发明涉及智能无人装车系统的智能小车及其位移控制方法,应用于垛装产品智能无人装车系统,所述智能小车底部设置有舵轮、辅助万向轮、第一从动轮组和第二从动轮组,所述智能小车底部左右两端分别设置有第三测距传感器和第四测距传感器,所述舵轮驱动模块可以将舵轮的中心转轴在水平面内进行旋转从而改变舵轮的前进方向,通过行进过程中监测第三测距传感器和第四测距传感器的测距值差异,判断是否发生倾斜,避免发生倾翻。
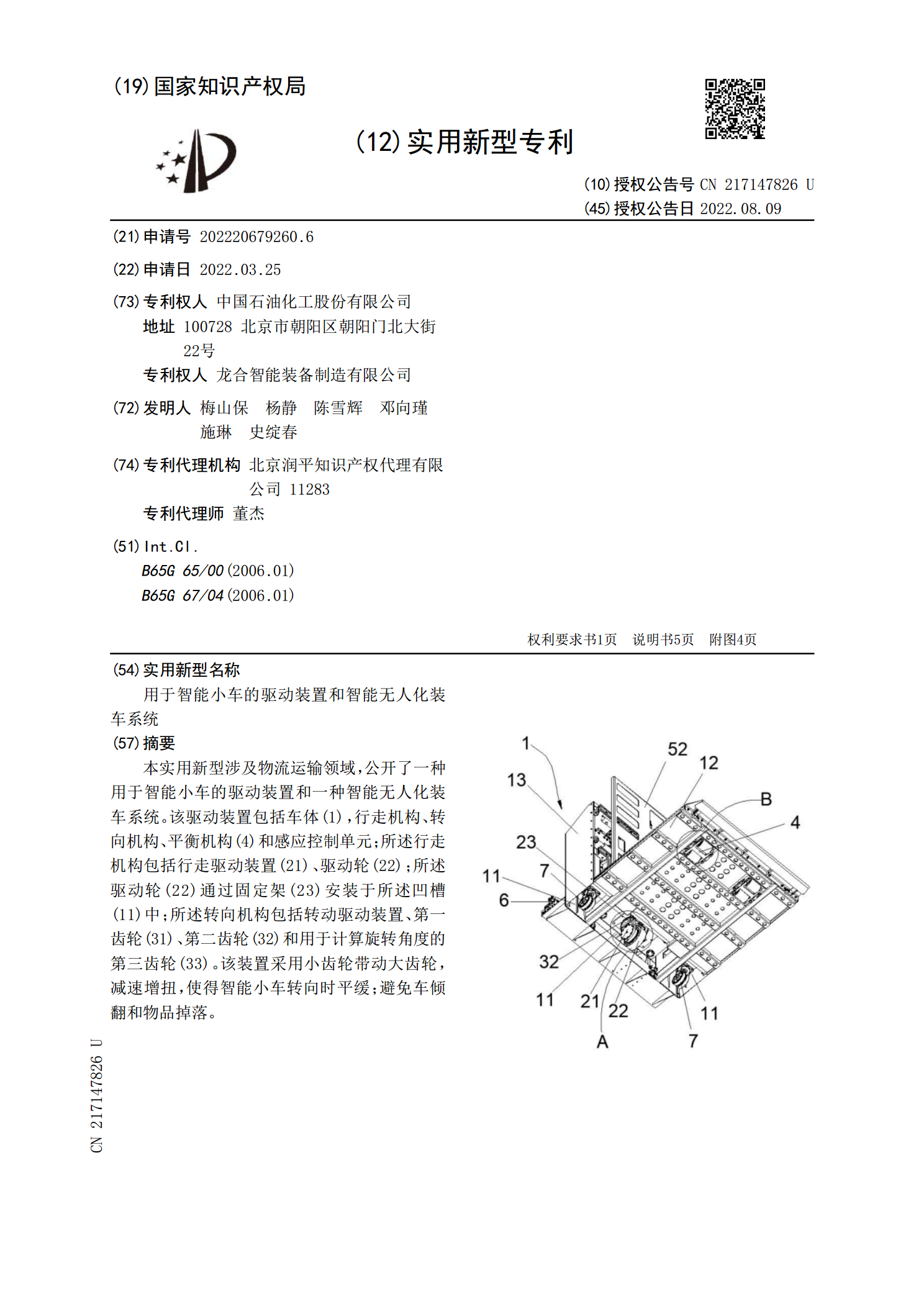
用于智能小车的驱动装置和智能无人化装车系统.pdf
本实用新型涉及物流运输领域,公开了一种用于智能小车的驱动装置和一种智能无人化装车系统。该驱动装置包括车体(1),行走机构、转向机构、平衡机构(4)和感应控制单元;所述行走机构包括行走驱动装置(21)、驱动轮(22);所述驱动轮(22)通过固定架(23)安装于所述凹槽(11)中;所述转向机构包括转动驱动装置、第一齿轮(31)、第二齿轮(32)和用于计算旋转角度的第三齿轮(33)。该装置采用小齿轮带动大齿轮,减速增扭,使得智能小车转向时平缓;避免车倾翻和物品掉落。
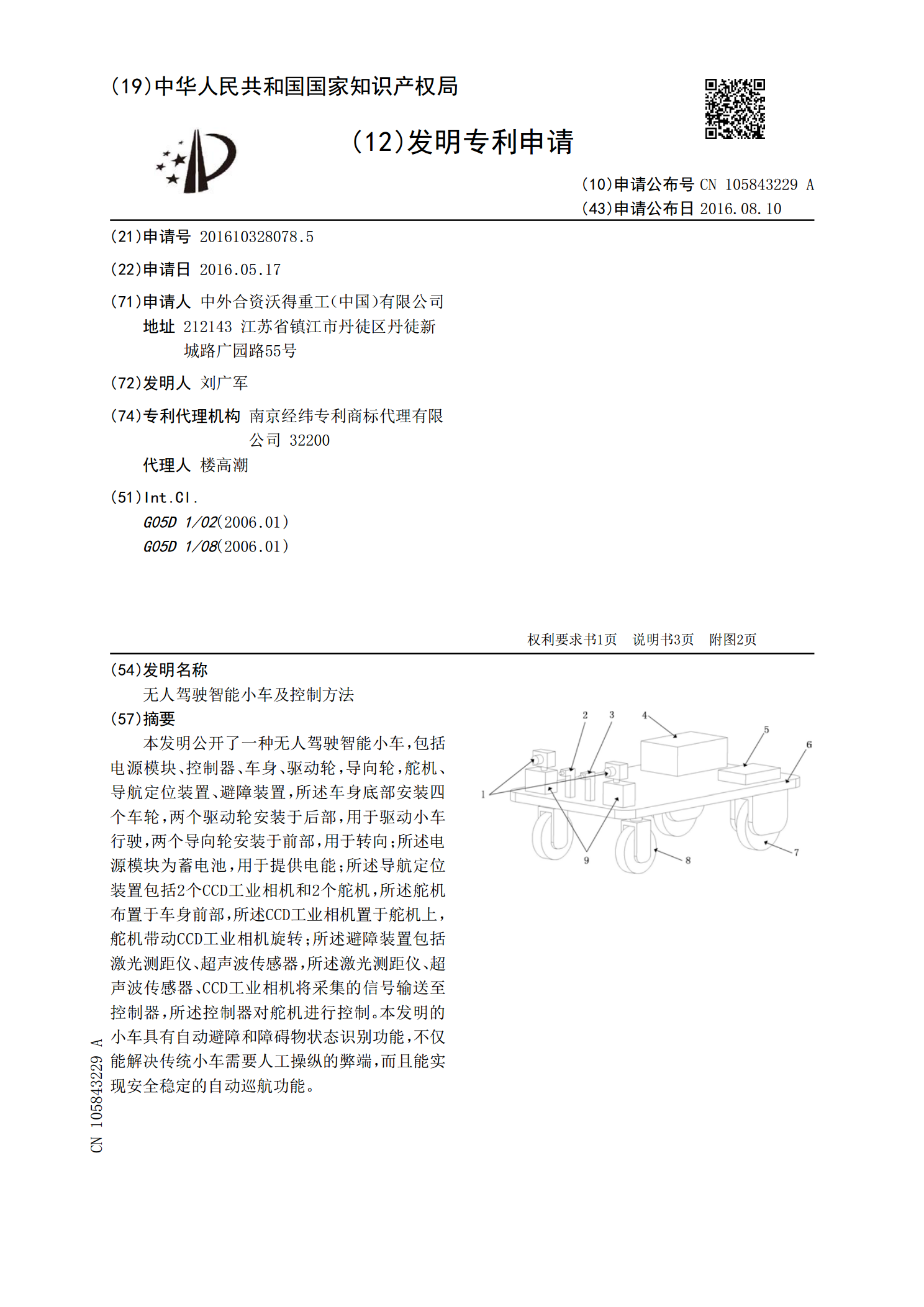
无人驾驶智能小车及控制方法.pdf
本发明公开了一种无人驾驶智能小车,包括电源模块、控制器、车身、驱动轮,导向轮,舵机、导航定位装置、避障装置,所述车身底部安装四个车轮,两个驱动轮安装于后部,用于驱动小车行驶,两个导向轮安装于前部,用于转向;所述电源模块为蓄电池,用于提供电能;所述导航定位装置包括2个CCD工业相机和2个舵机,所述舵机布置于车身前部,所述CCD工业相机置于舵机上,舵机带动CCD工业相机旋转;所述避障装置包括激光测距仪、超声波传感器,所述激光测距仪、超声波传感器、CCD工业相机将采集的信号输送至控制器,所述控制器对舵机进行控制

垛装产品智能无人装车系统与方法.pdf
本发明涉及一种垛装产品智能无人装车系统与方法,其包含轨道支架、飞叉、装车小车、升降平台,所述升降平台的顶面与集装箱货车车箱地板平齐,所述轨道支架上端设置有行车轨道,行车轨道上滑动安装有桥式行车,桥式行车下部设置有升降机构,飞叉设置在升降机构下端,所述装车小车空载时停留于升降平台上,飞叉在桥式行车带动下从码垛翻转器叉取待装车垛装物料并将其放置于装车小车上,装车小车再将待装车垛装物料送入集装箱货车车箱内,本系统用于将待装车垛装物料从码垛翻转器搬入集装箱货车车箱内,可实现智能化无人化装车作业。
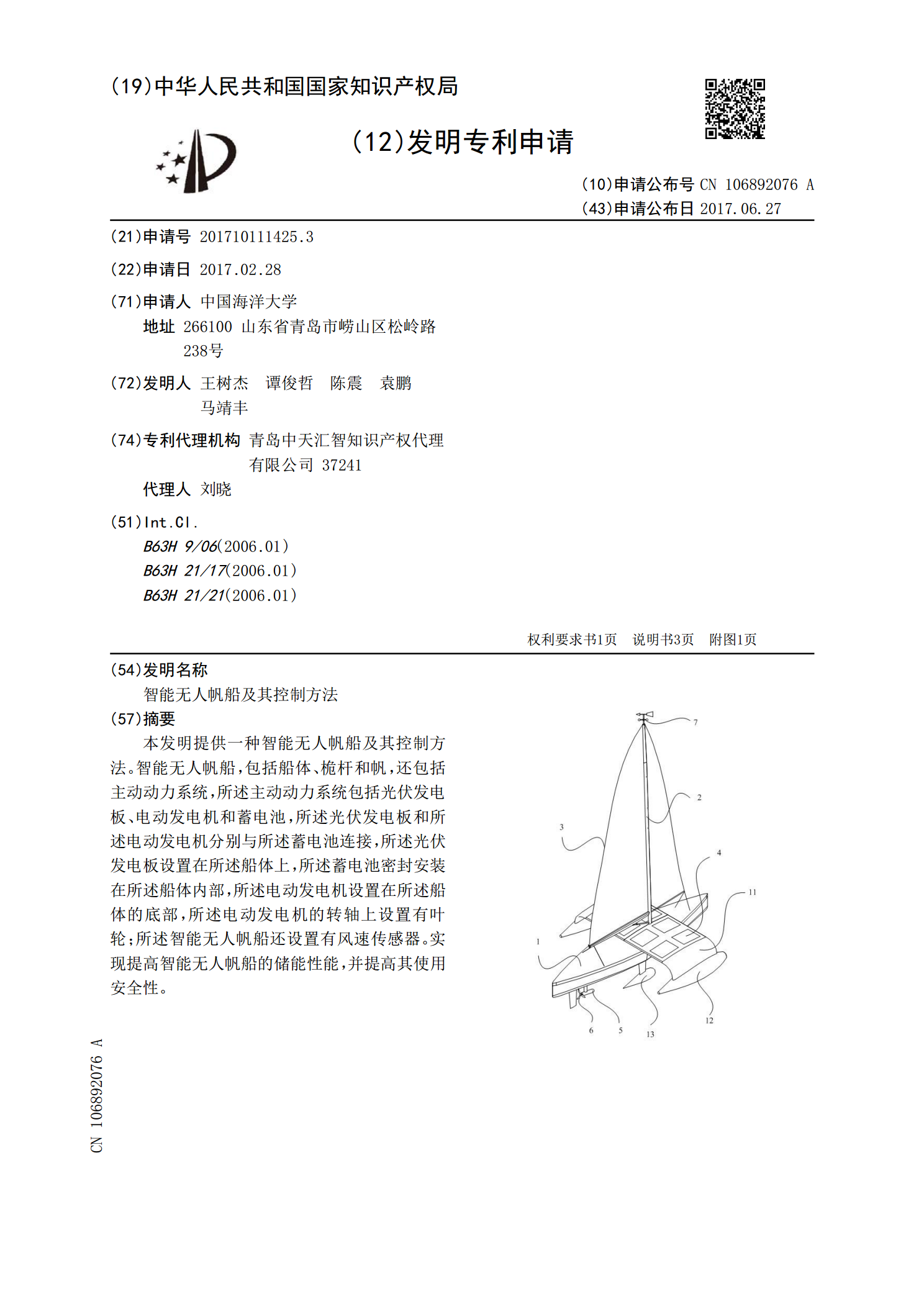
智能无人帆船及其控制方法.pdf
本发明提供一种智能无人帆船及其控制方法。智能无人帆船,包括船体、桅杆和帆,还包括主动动力系统,所述主动动力系统包括光伏发电板、电动发电机和蓄电池,所述光伏发电板和所述电动发电机分别与所述蓄电池连接,所述光伏发电板设置在所述船体上,所述蓄电池密封安装在所述船体内部,所述电动发电机设置在所述船体的底部,所述电动发电机的转轴上设置有叶轮;所述智能无人帆船还设置有风速传感器。实现提高智能无人帆船的储能性能,并提高其使用安全性。