
一种AGV智能小车及其控制方法.pdf

如灵****姐姐

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种AGV智能小车及其控制方法.pdf
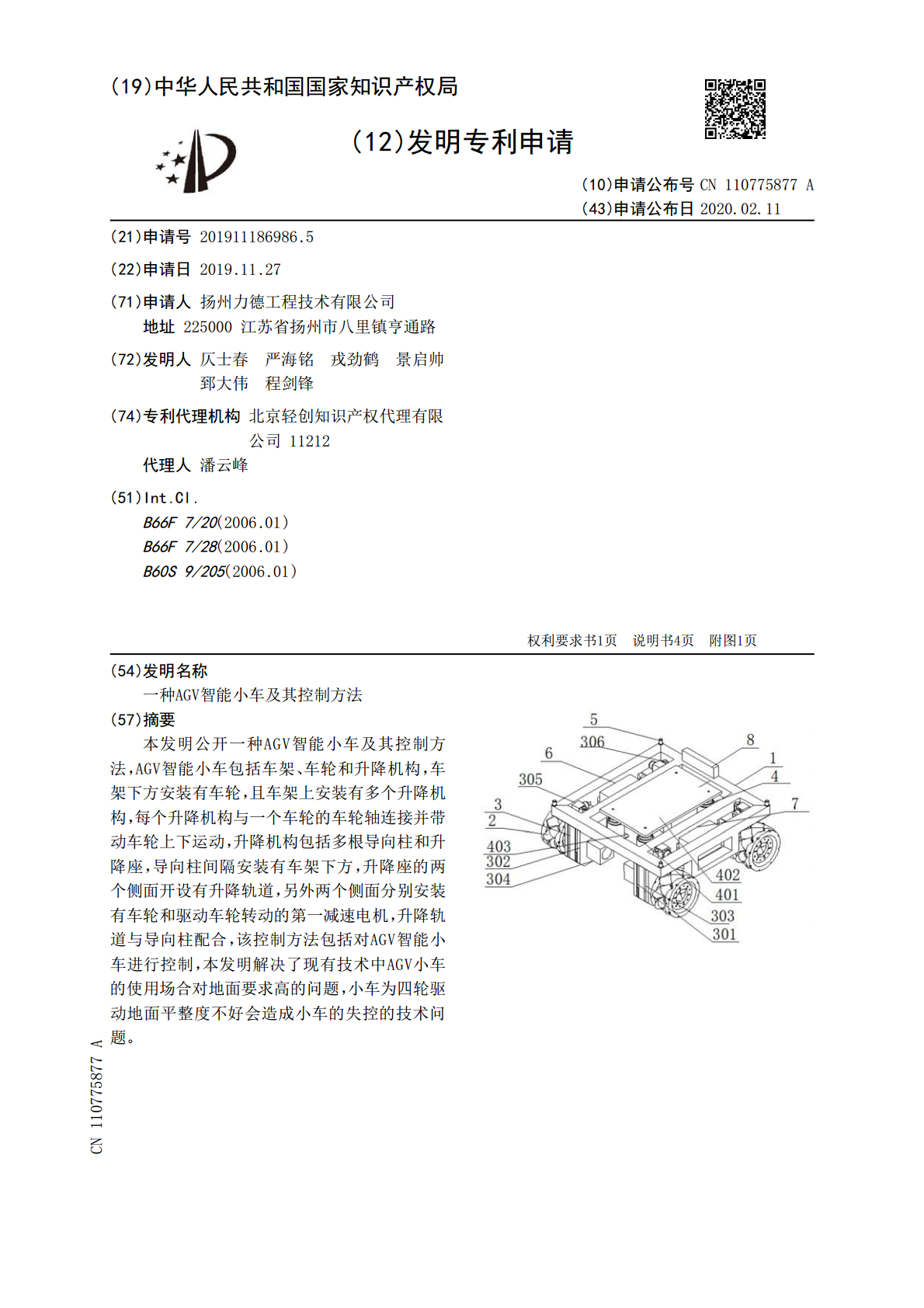
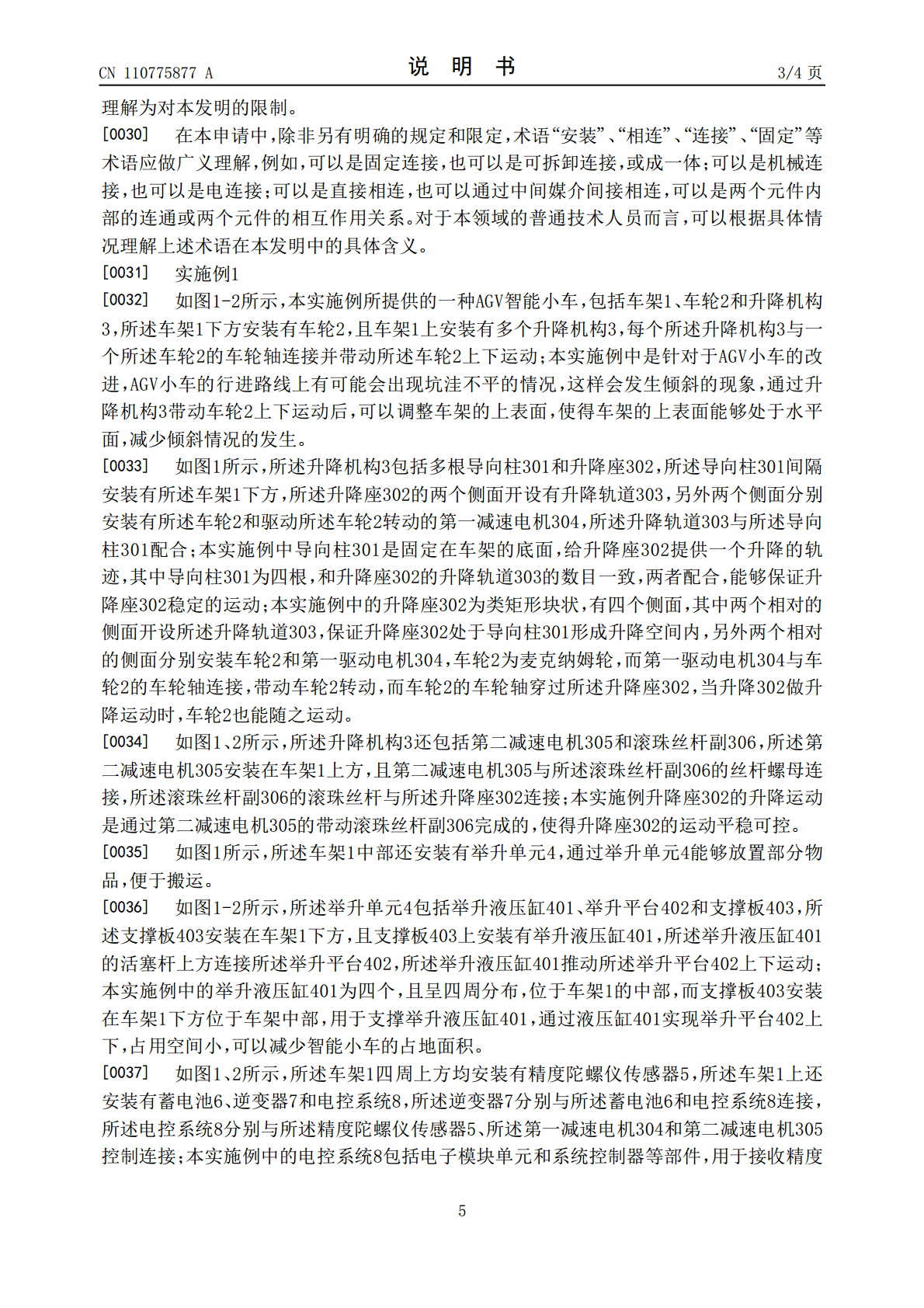
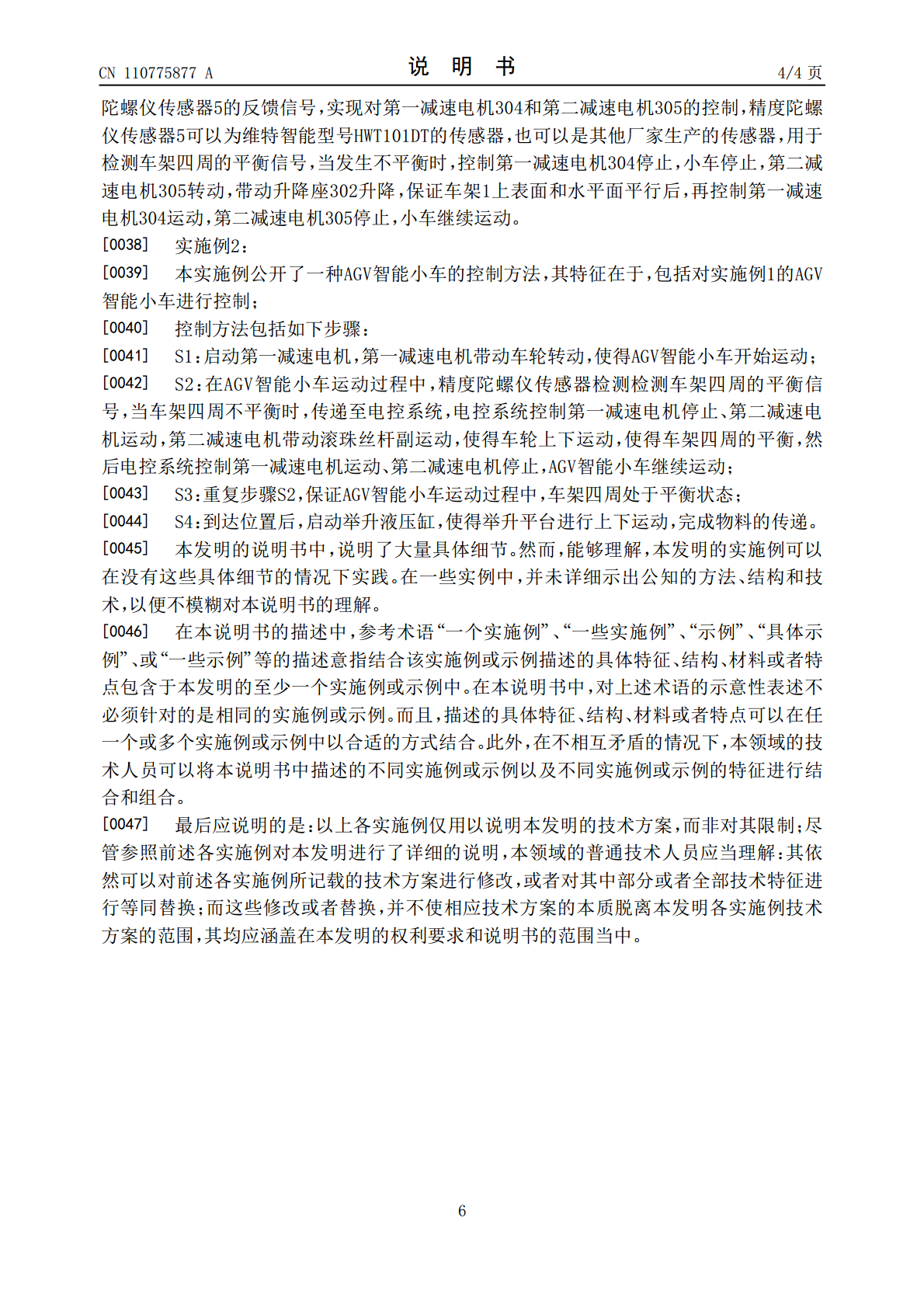
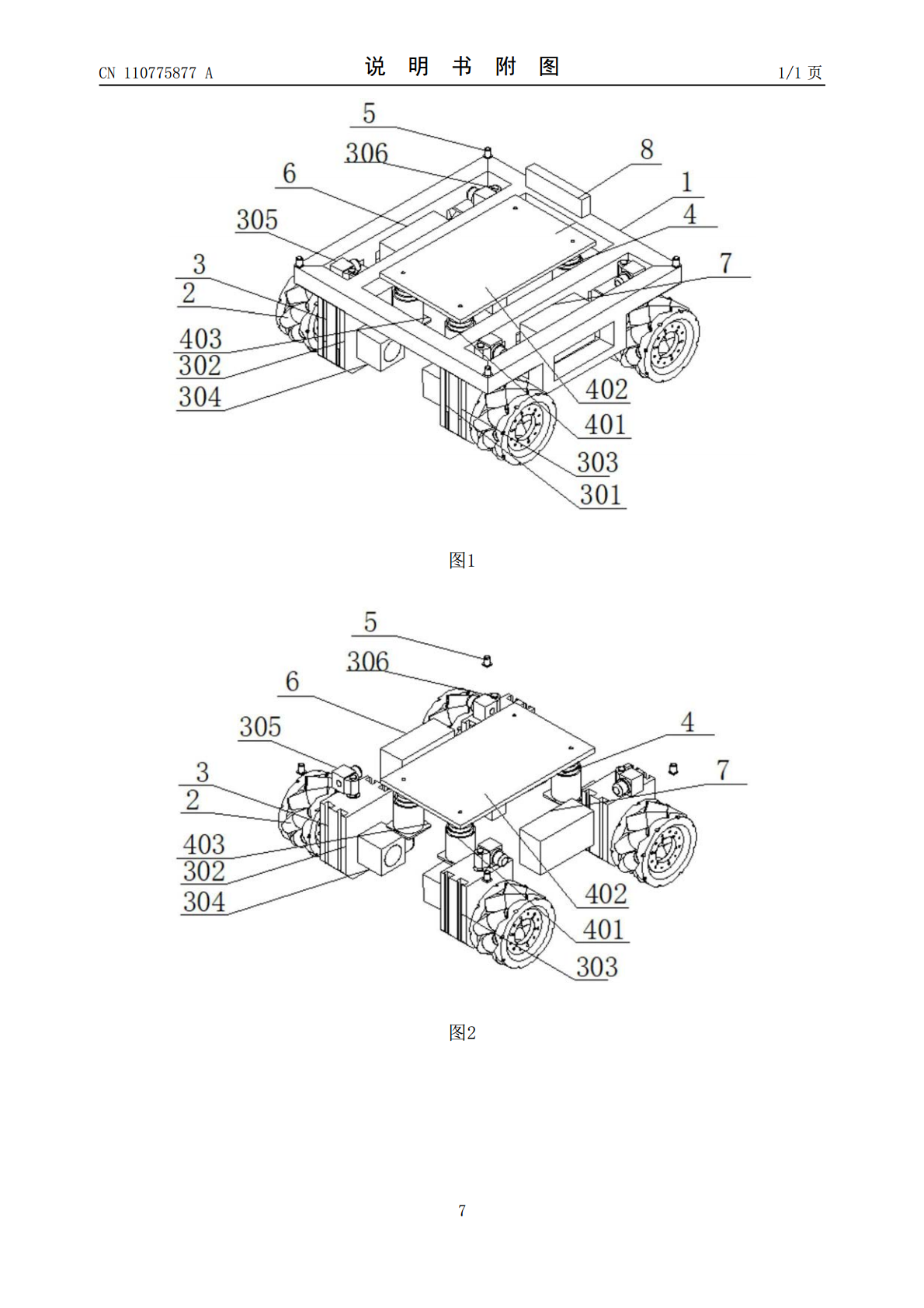
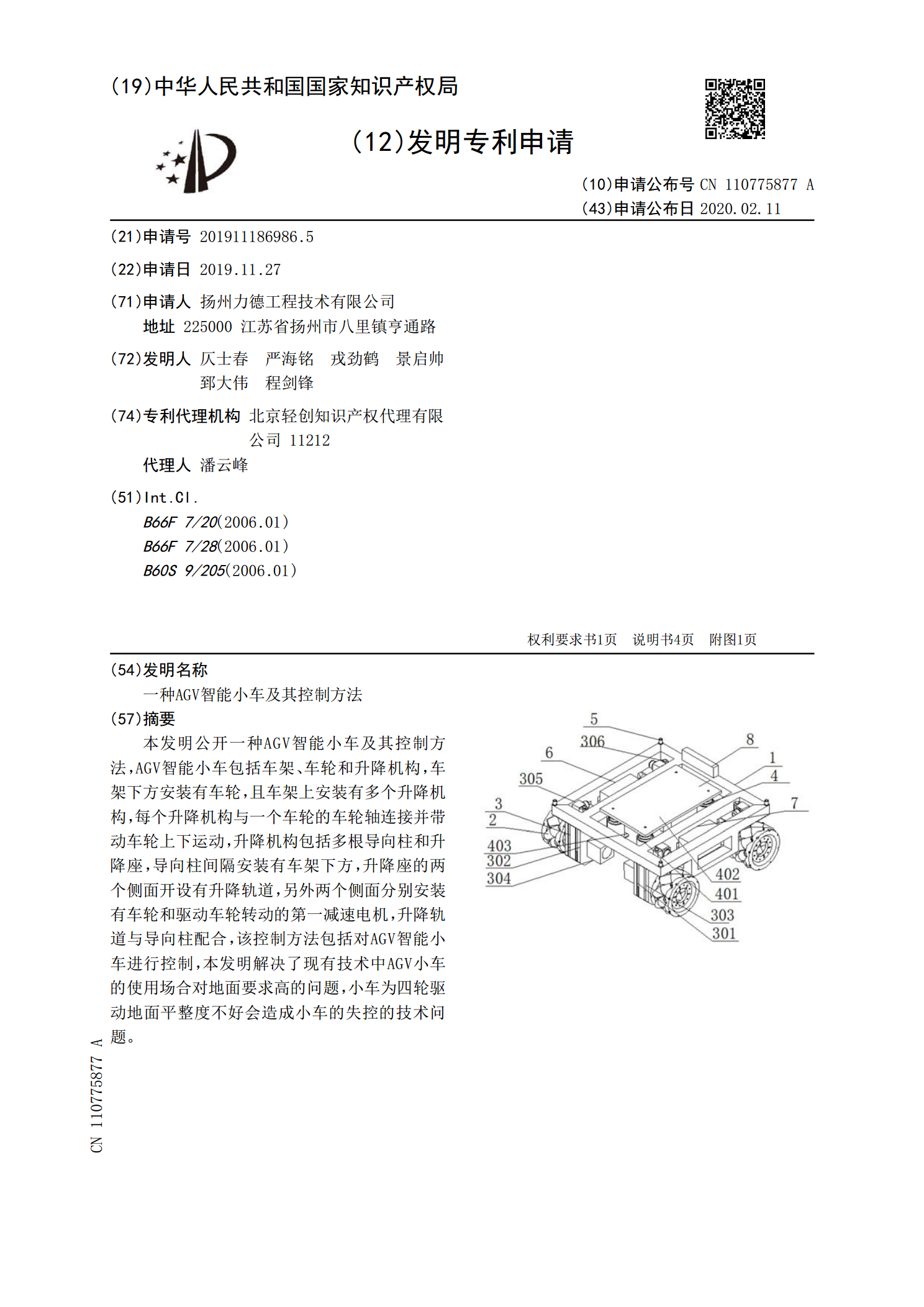
本发明公开一种AGV智能小车及其控制方法,AGV智能小车包括车架、车轮和升降机构,车架下方安装有车轮,且车架上安装有多个升降机构,每个升降机构与一个车轮的车轮轴连接并带动车轮上下运动,升降机构包括多根导向柱和升降座,导向柱间隔安装有车架下方,升降座的两个侧面开设有升降轨道,另外两个侧面分别安装有车轮和驱动车轮转动的第一减速电机,升降轨道与导向柱配合,该控制方法包括对AGV智能小车进行控制,本发明解决了现有技术中AGV小车的使用场合对地面要求高的问题,小车为四轮驱动地面平整度不好会造成小车的失控的技术问题。
一种智能全向AGV小车及其控制方法.pdf
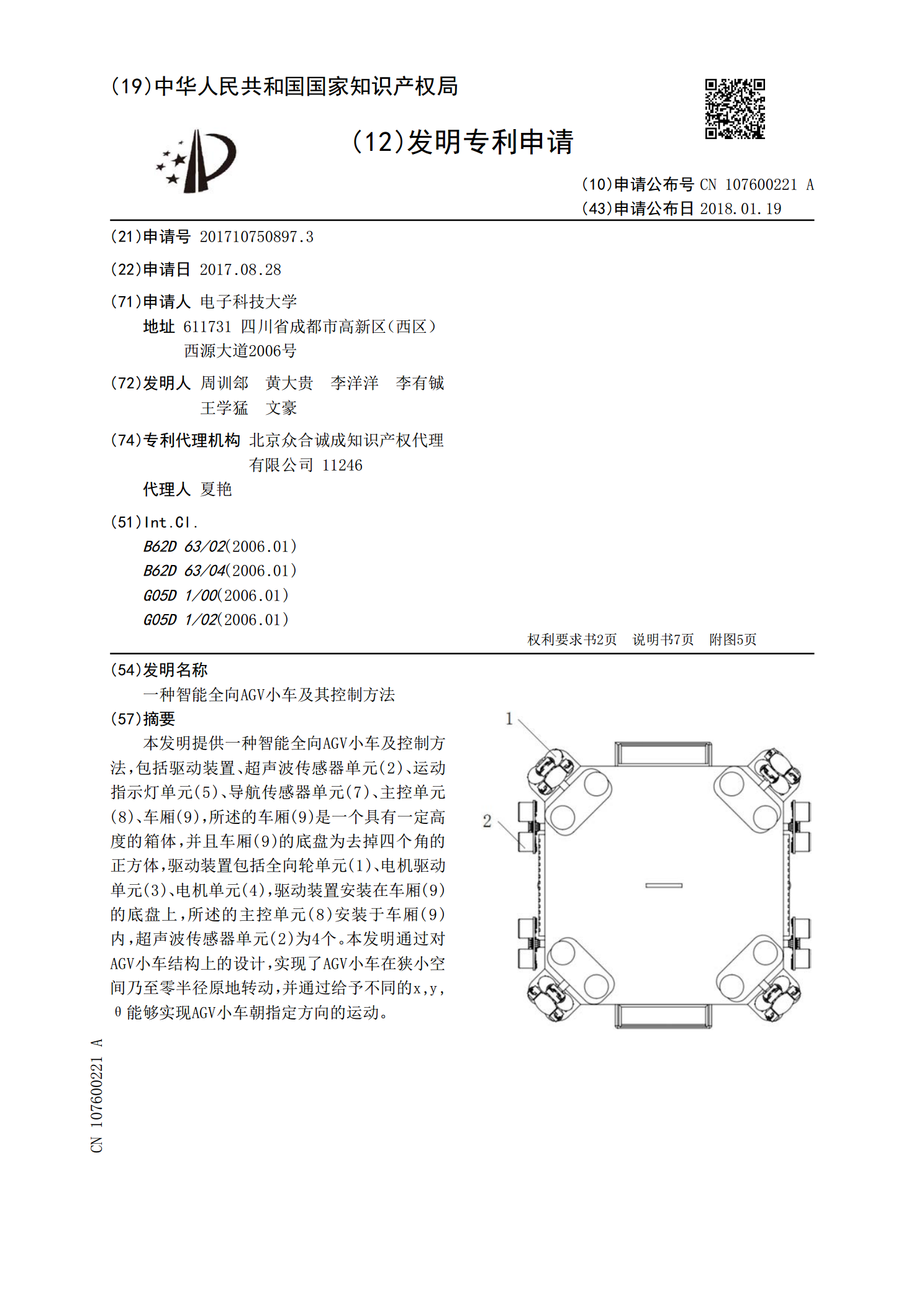
本发明提供一种智能全向AGV小车及控制方法,包括驱动装置、超声波传感器单元(2)、运动指示灯单元(5)、导航传感器单元(7)、主控单元(8)、车厢(9),所述的车厢(9)是一个具有一定高度的箱体,并且车厢(9)的底盘为去掉四个角的正方体,驱动装置包括全向轮单元(1)、电机驱动单元(3)、电机单元(4),驱动装置安装在车厢(9)的底盘上,所述的主控单元(8)安装于车厢(9)内,超声波传感器单元(2)为4个。本发明通过对AGV小车结构上的设计,实现了AGV小车在狭小空间乃至零半径原地转动,并通过给予不同的x,

一种智能AGV小车及其系统.pdf
一种智能AGV小车及其系统,所述AGV小车包括车体、装载装置、小车控制柜、驱动组件和万向轮,所述装载装置设置于所述车体的上端面,所述小车控制柜的底部设有滑轮,所述小车控制柜通过所述小车内部设有的导轨采用抽屉形式可抽出的设置于所述小车的内部,所述驱动组件设置于所述车体的底部,所述驱动组件包括驱动电机和驱动轮,所述驱动轮连接于所述驱动电机的输出端;所述AGV小车由所述驱动轮和万向轮支撑于地面,所述驱动电机驱动所述驱动轮进行前进和后退运动。本发明提出一种代替人工转移搬运的智能AGV小车及其系统,实现不同方位、远
一种AGV小车物料输送系统及其控制方法.pdf
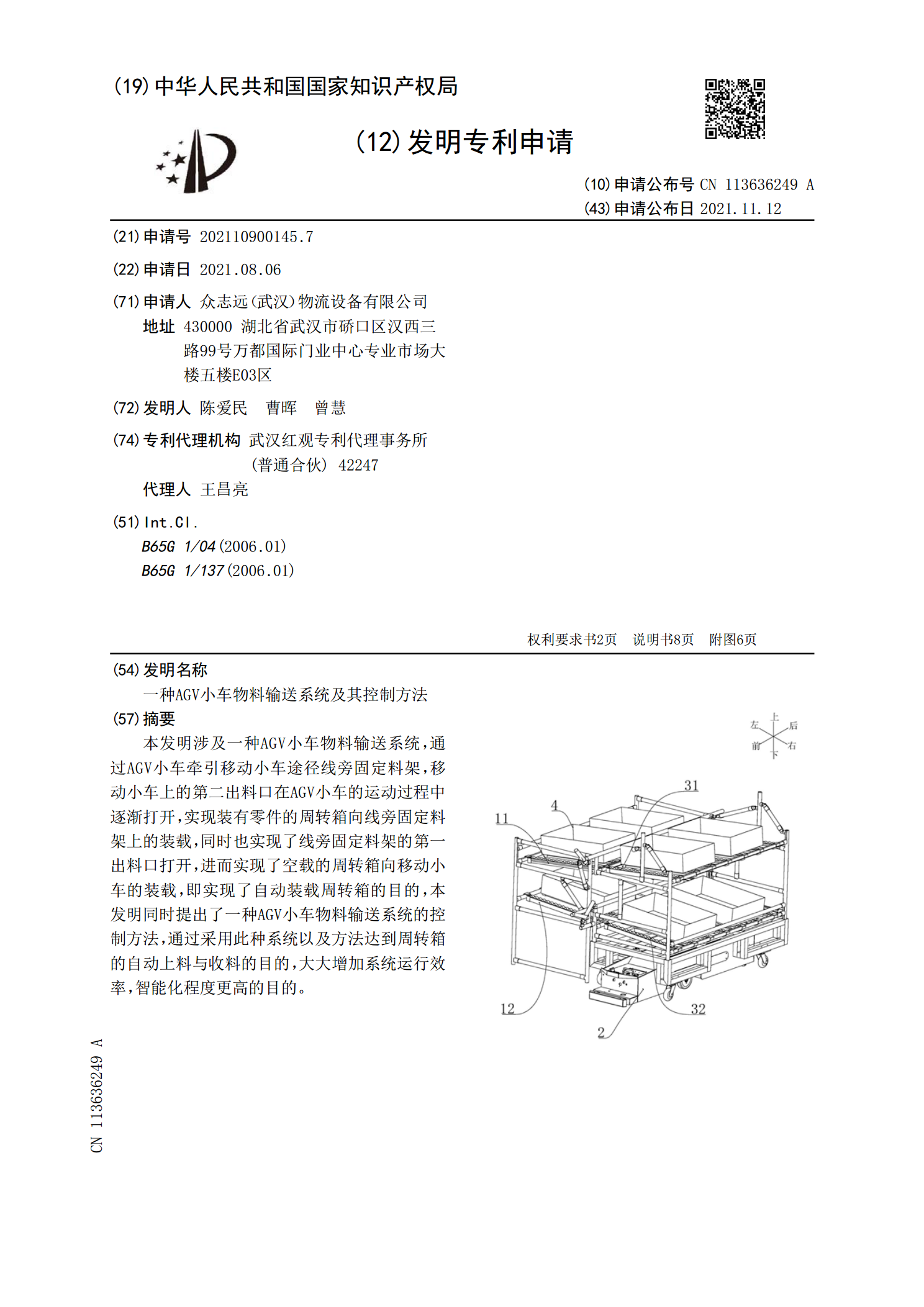
本发明涉及一种AGV小车物料输送系统,通过AGV小车牵引移动小车途径线旁固定料架,移动小车上的第二出料口在AGV小车的运动过程中逐渐打开,实现装有零件的周转箱向线旁固定料架上的装载,同时也实现了线旁固定料架的第一出料口打开,进而实现了空载的周转箱向移动小车的装载,即实现了自动装载周转箱的目的,本发明同时提出了一种AGV小车物料输送系统的控制方法,通过采用此种系统以及方法达到周转箱的自动上料与收料的目的,大大增加系统运行效率,智能化程度更高的目的。
一种AGV小车物料输送系统及其控制方法.pdf
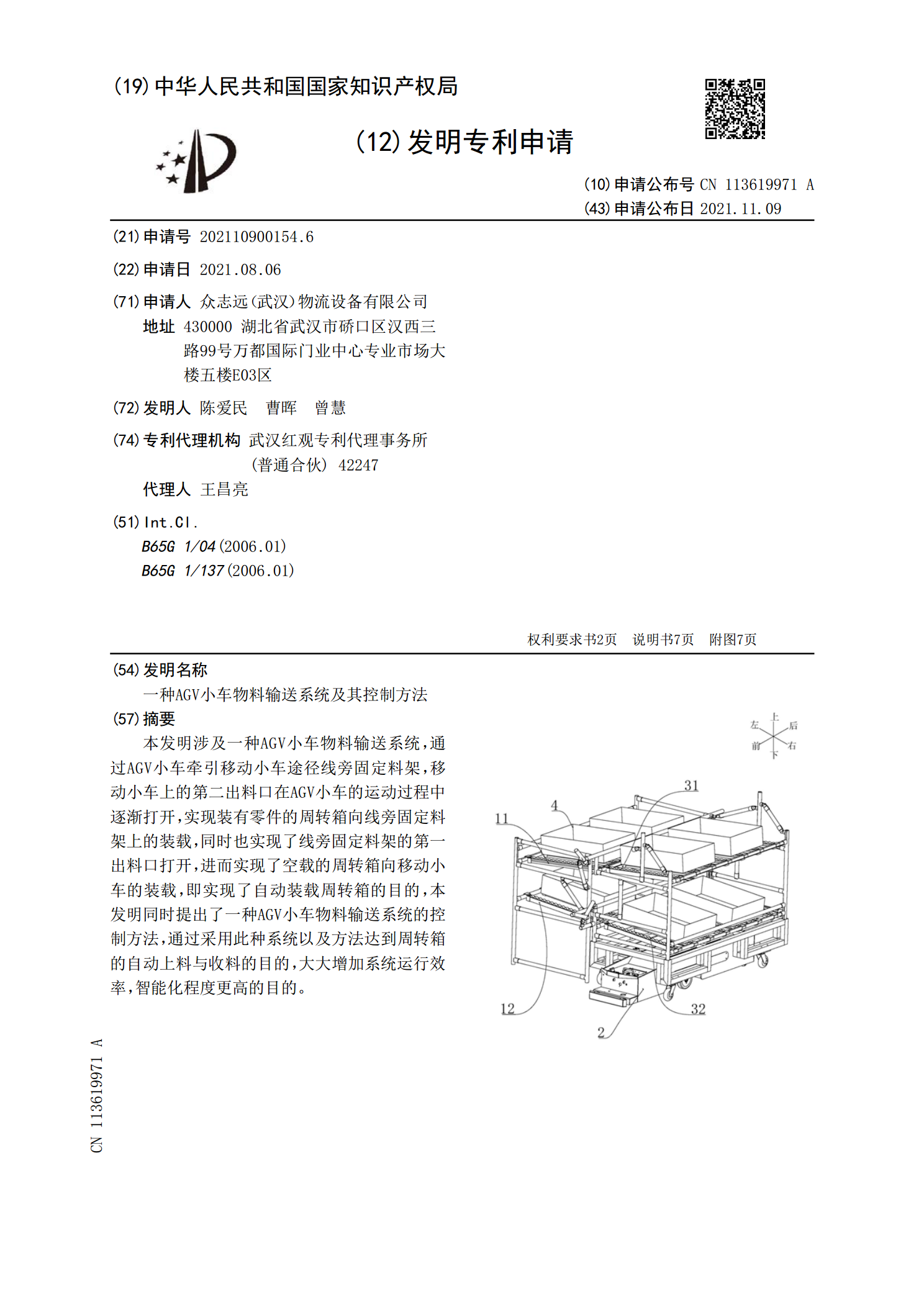
本发明涉及一种AGV小车物料输送系统,通过AGV小车牵引移动小车途径线旁固定料架,移动小车上的第二出料口在AGV小车的运动过程中逐渐打开,实现装有零件的周转箱向线旁固定料架上的装载,同时也实现了线旁固定料架的第一出料口打开,进而实现了空载的周转箱向移动小车的装载,即实现了自动装载周转箱的目的,本发明同时提出了一种AGV小车物料输送系统的控制方法,通过采用此种系统以及方法达到周转箱的自动上料与收料的目的,大大增加系统运行效率,智能化程度更高的目的。