
一种全向行驶车辆模块化驱动转向系统及车辆.pdf

猫巷****正德

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种全向行驶车辆模块化驱动转向系统及车辆.pdf
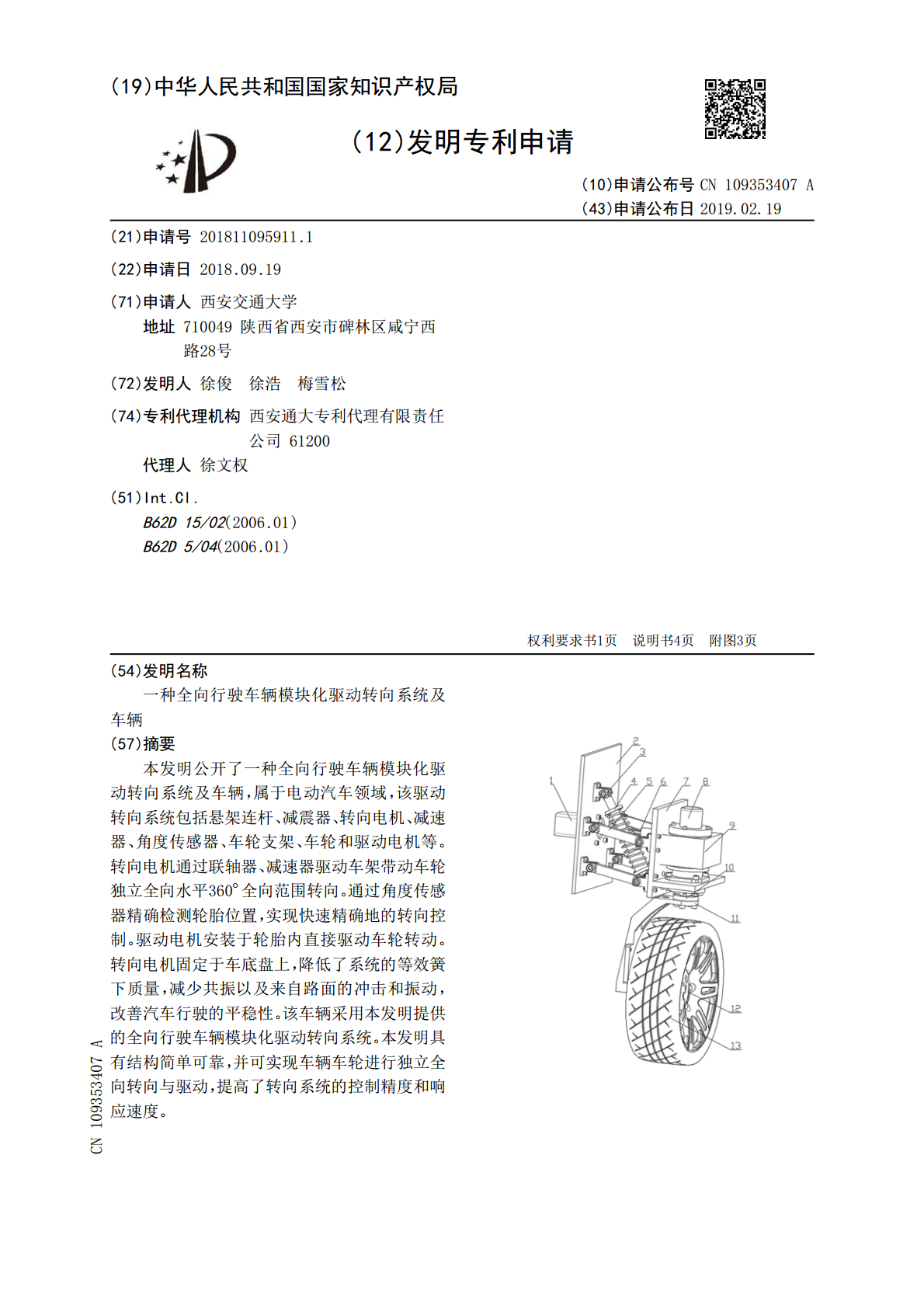
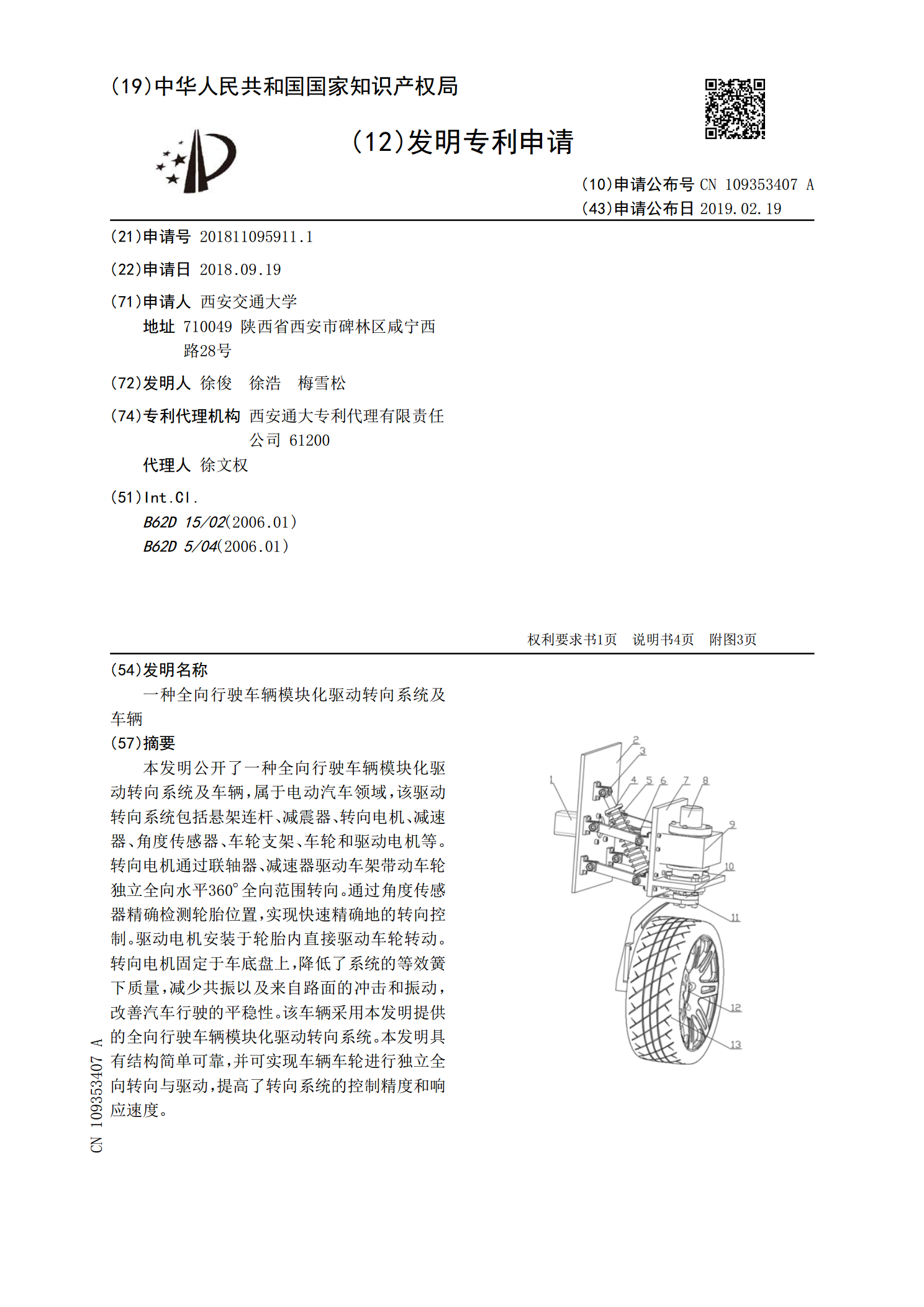
本发明公开了一种全向行驶车辆模块化驱动转向系统及车辆,属于电动汽车领域,该驱动转向系统包括悬架连杆、减震器、转向电机、减速器、角度传感器、车轮支架、车轮和驱动电机等。转向电机通过联轴器、减速器驱动车架带动车轮独立全向水平360°全向范围转向。通过角度传感器精确检测轮胎位置,实现快速精确地的转向控制。驱动电机安装于轮胎内直接驱动车轮转动。转向电机固定于车底盘上,降低了系统的等效簧下质量,减少共振以及来自路面的冲击和振动,改善汽车行驶的平稳性。该车辆采用本发明提供的全向行驶车辆模块化驱动转向系统。本发明具有结
全向行驶移动平台转向驱动机构和转向驱动系统.pdf
本发明公开了一种全向行驶移动平台转向驱动机构和转向驱动系统,转向驱动系统包括电气控制模块和机械执行机构;电气控制模块的指令分配计算器接收由解码器解码的来自主机的指令,并将指令分配给转向部分和驱动部分并最终控制转向或驱动电机调速;转向电机控制机械执行机构内部的舵机的运转,舵机输出轴伸入转向轴,转向轴与舵机输出轴同步转动,舵机固定件与紧压构件相对的面上设有平面轴承座圈,滚针轴承卡入平面轴承座圈内部,滚针轴承内的滚针与转动轴接触,转向轴固定连接转板的一端,转板另一端固定连接车轮转轴。本发明公开的转向驱动系统能够
一种驱动转向单元、模块化车辆及模块化运输系统.pdf
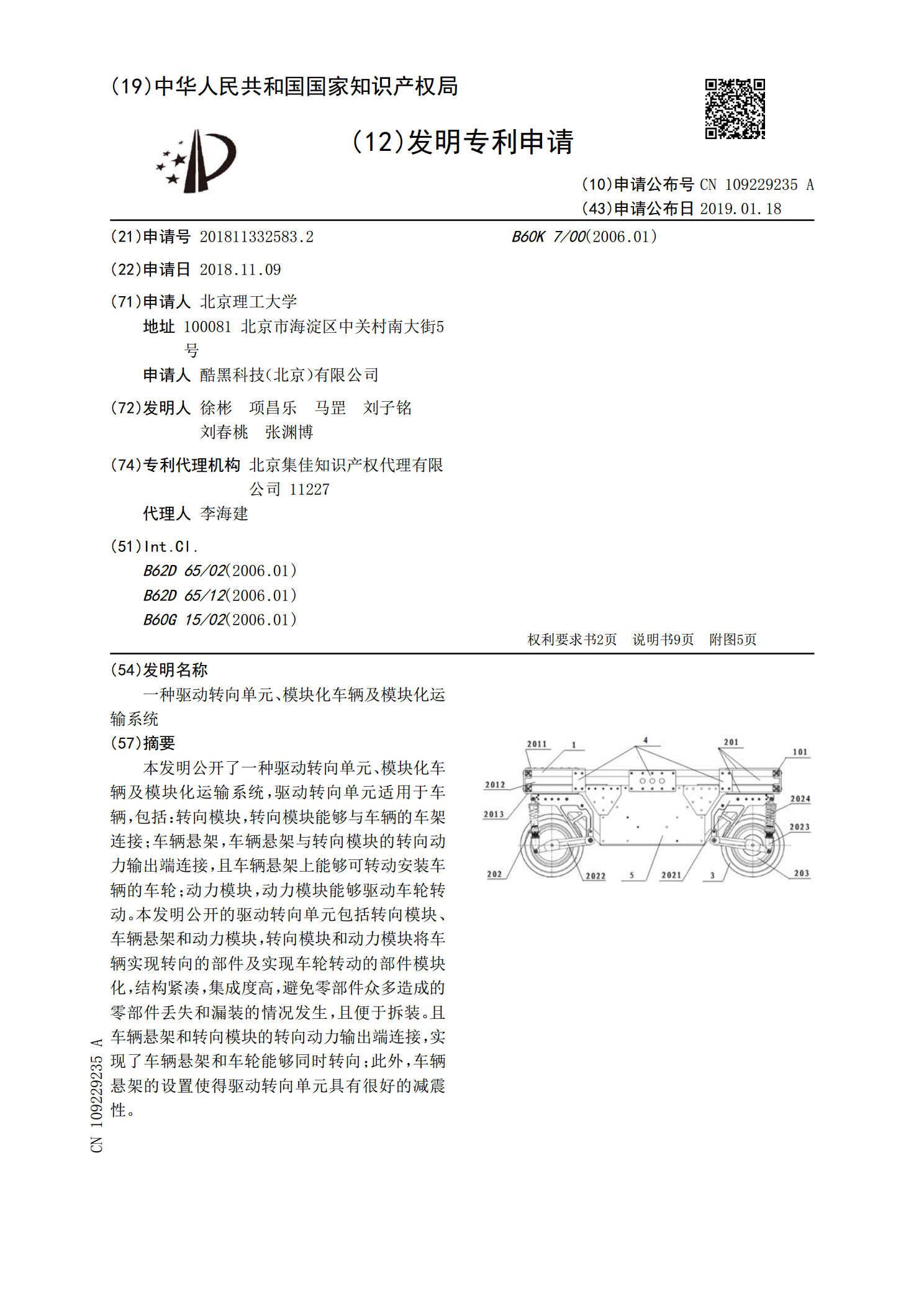
本发明公开了一种驱动转向单元、模块化车辆及模块化运输系统,驱动转向单元适用于车辆,包括:转向模块,转向模块能够与车辆的车架连接;车辆悬架,车辆悬架与转向模块的转向动力输出端连接,且车辆悬架上能够可转动安装车辆的车轮;动力模块,动力模块能够驱动车轮转动。本发明公开的驱动转向单元包括转向模块、车辆悬架和动力模块,转向模块和动力模块将车辆实现转向的部件及实现车轮转动的部件模块化,结构紧凑,集成度高,避免零部件众多造成的零部件丢失和漏装的情况发生,且便于拆装。且车辆悬架和转向模块的转向动力输出端连接,实现了车辆悬
用于轮毂驱动车辆的转向系统及轮毂驱动车辆.pdf
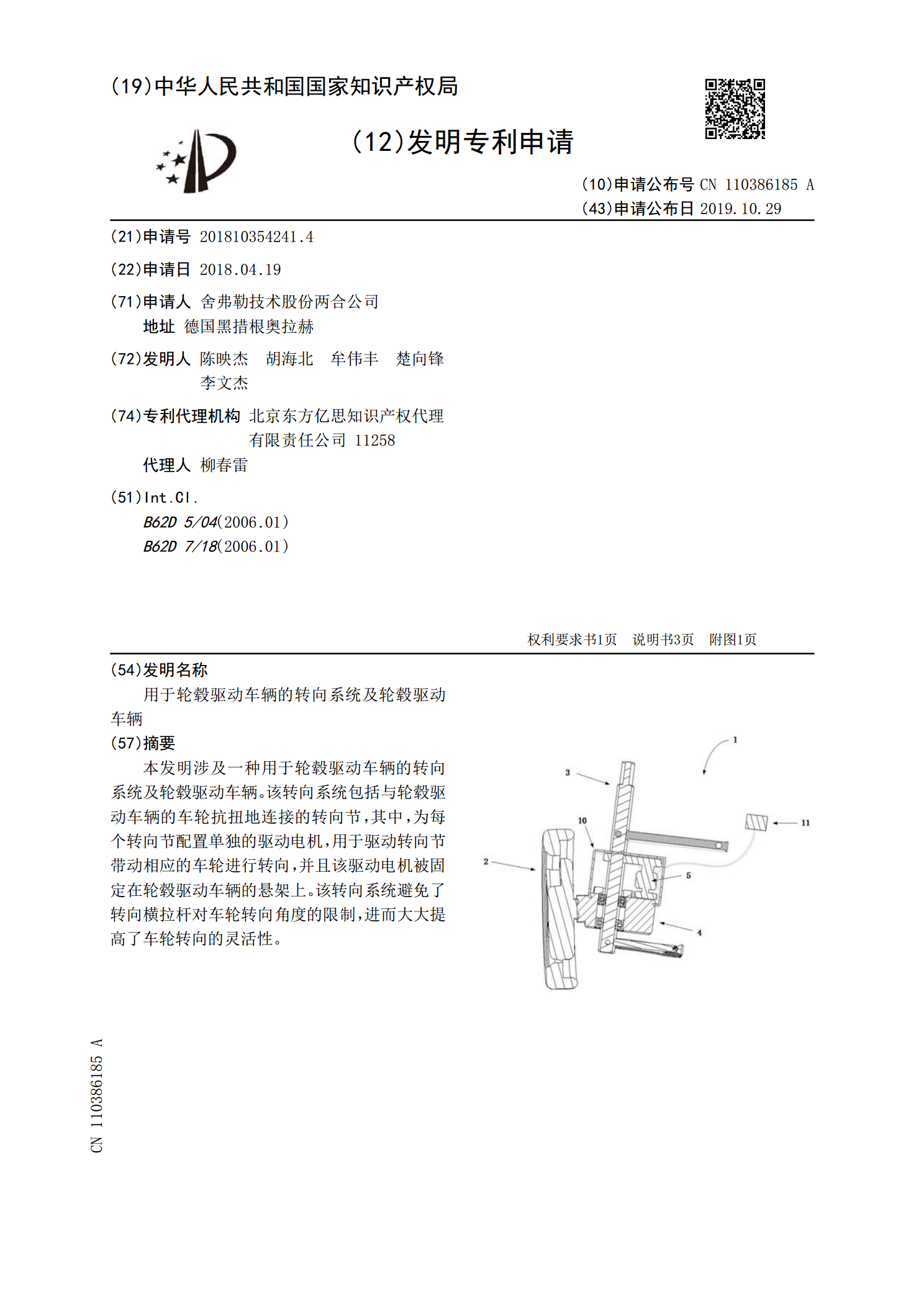
本发明涉及一种用于轮毂驱动车辆的转向系统及轮毂驱动车辆。该转向系统包括与轮毂驱动车辆的车轮抗扭地连接的转向节,其中,为每个转向节配置单独的驱动电机,用于驱动转向节带动相应的车轮进行转向,并且该驱动电机被固定在轮毂驱动车辆的悬架上。该转向系统避免了转向横拉杆对车轮转向角度的限制,进而大大提高了车轮转向的灵活性。
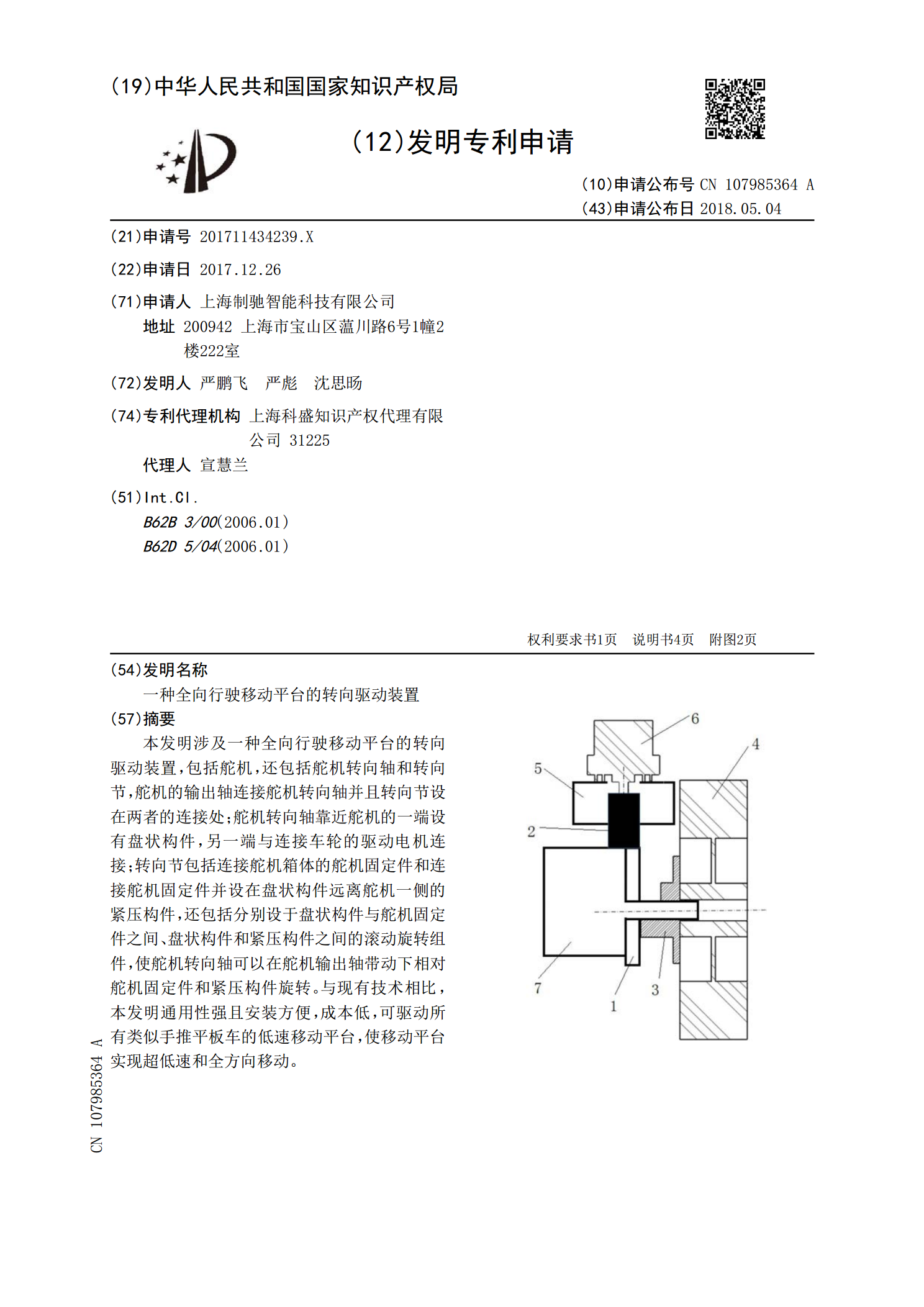
一种全向行驶移动平台的转向驱动装置.pdf
本发明涉及一种全向行驶移动平台的转向驱动装置,包括舵机,还包括舵机转向轴和转向节,舵机的输出轴连接舵机转向轴并且转向节设在两者的连接处;舵机转向轴靠近舵机的一端设有盘状构件,另一端与连接车轮的驱动电机连接;转向节包括连接舵机箱体的舵机固定件和连接舵机固定件并设在盘状构件远离舵机一侧的紧压构件,还包括分别设于盘状构件与舵机固定件之间、盘状构件和紧压构件之间的滚动旋转组件,使舵机转向轴可以在舵机输出轴带动下相对舵机固定件和紧压构件旋转。与现有技术相比,本发明通用性强且安装方便,成本低,可驱动所有类似手推平板车