
工字轮双夹爪机构.pdf

一只****呀盟

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
工字轮双夹爪机构.pdf
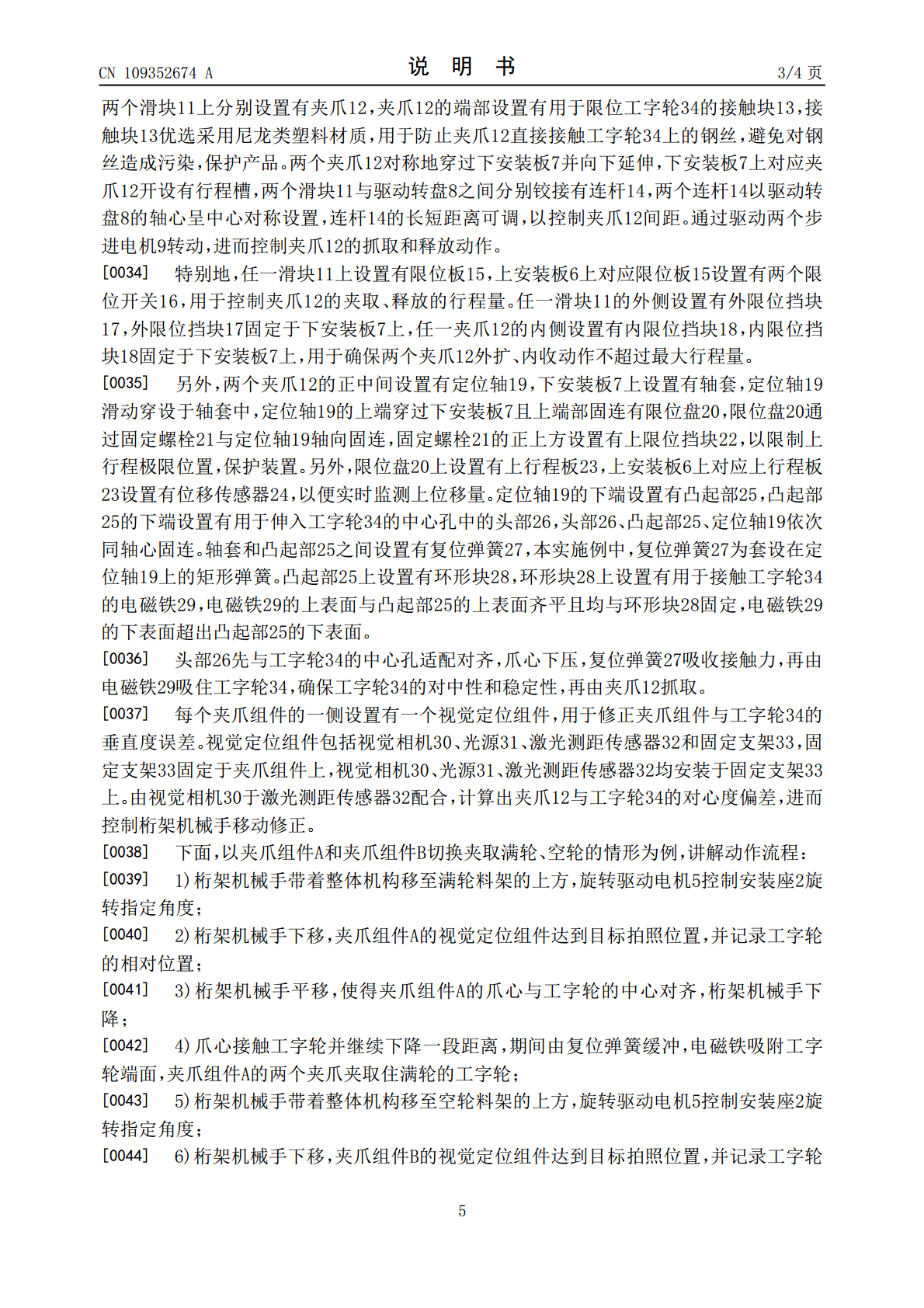
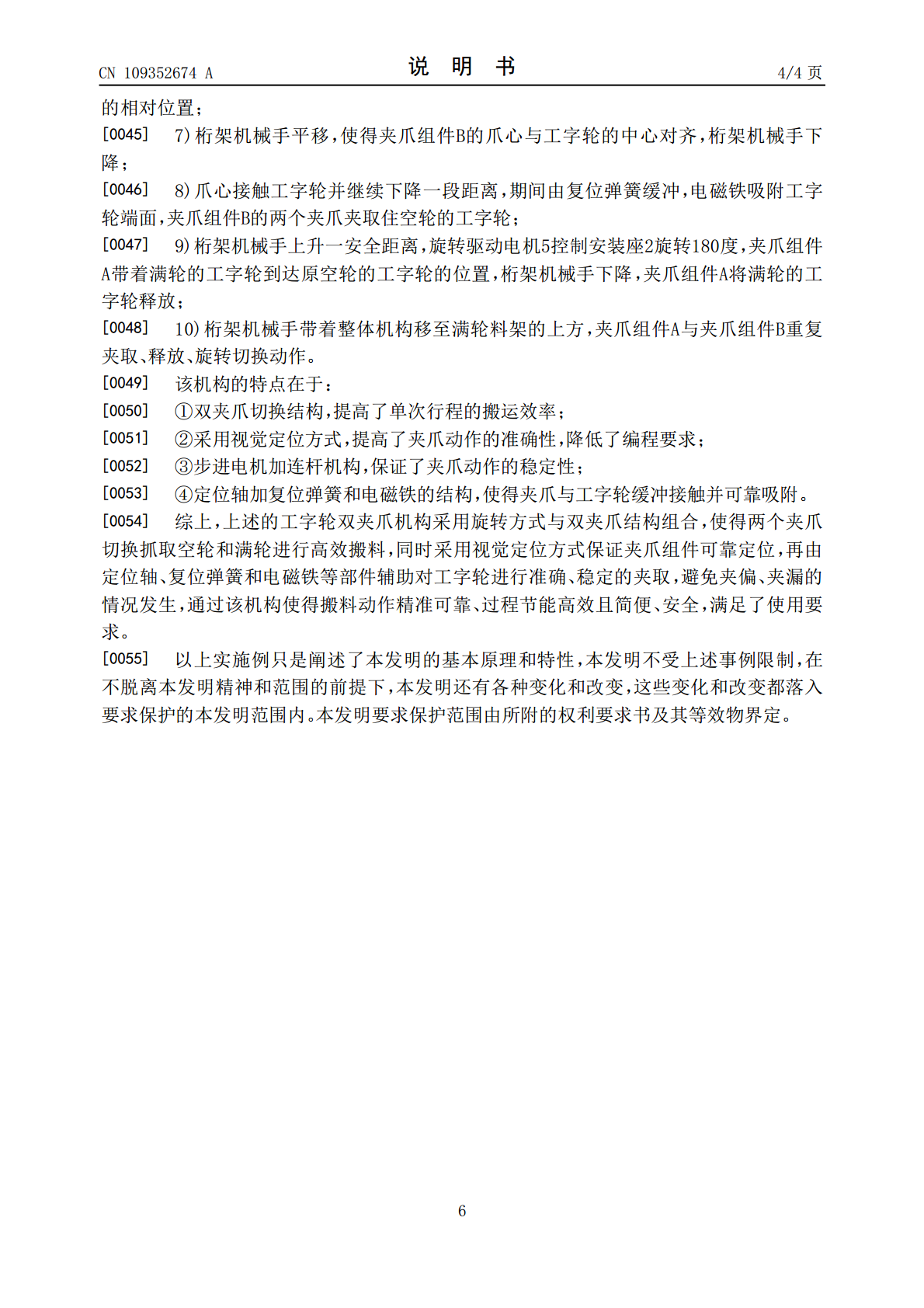
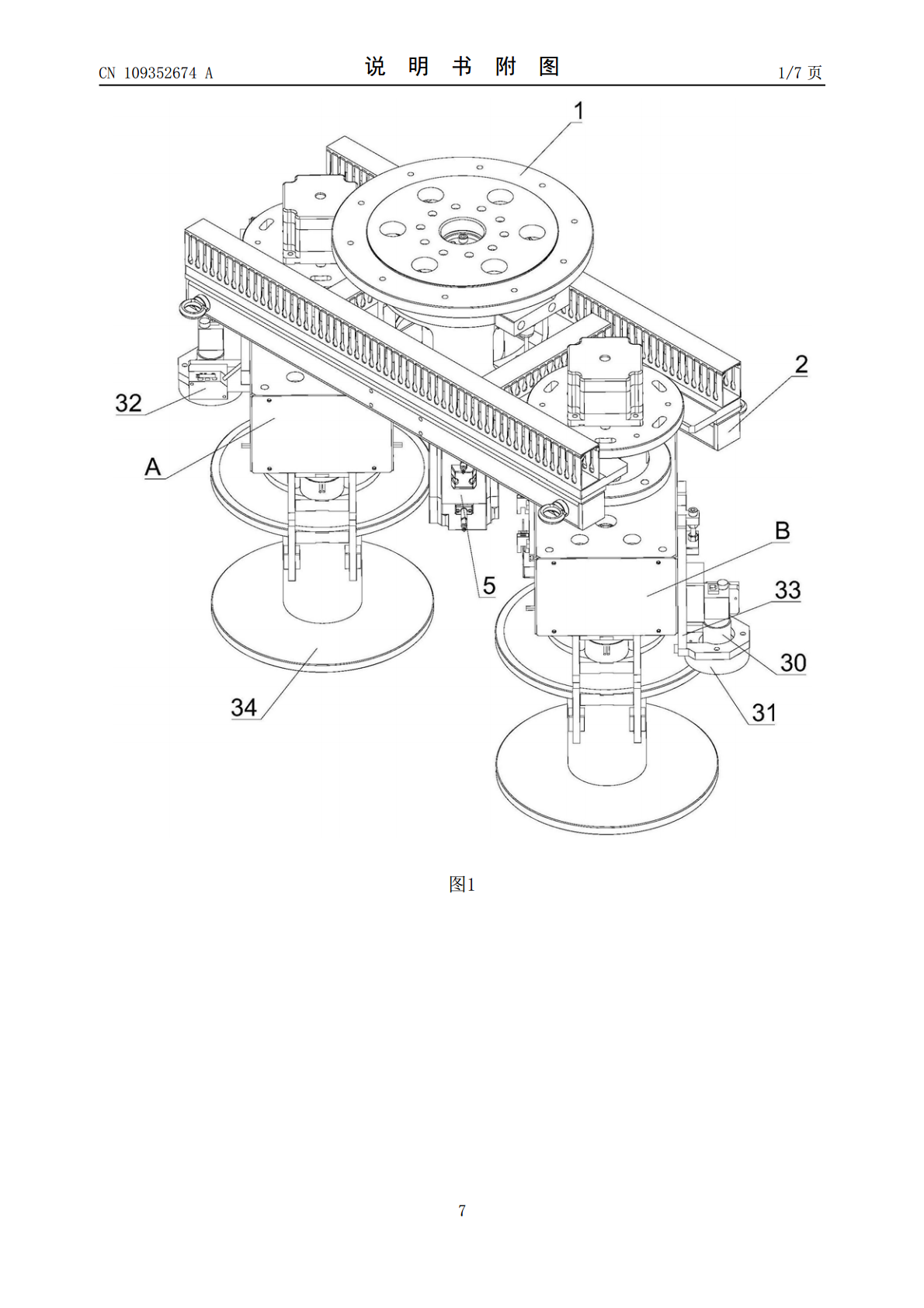
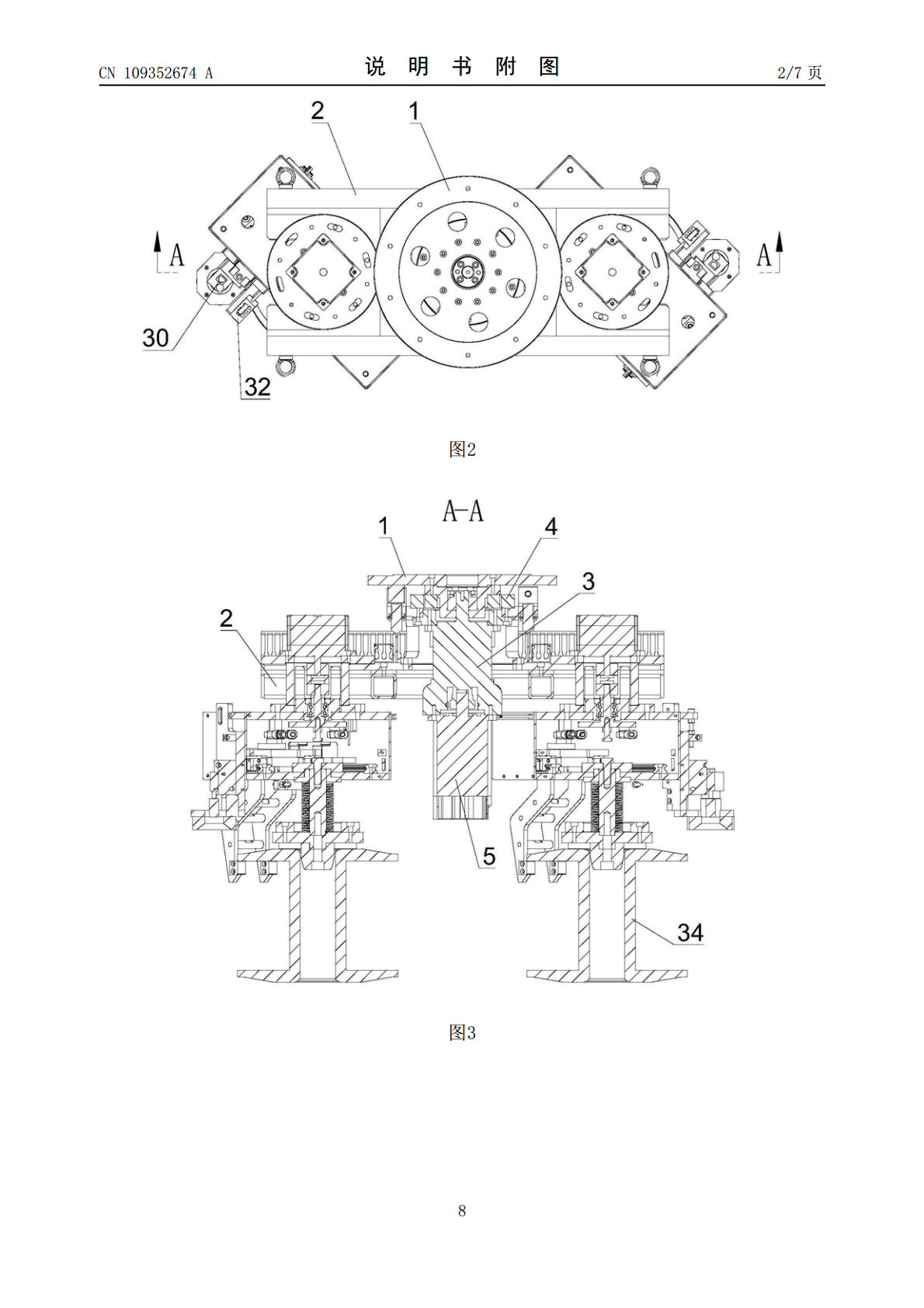
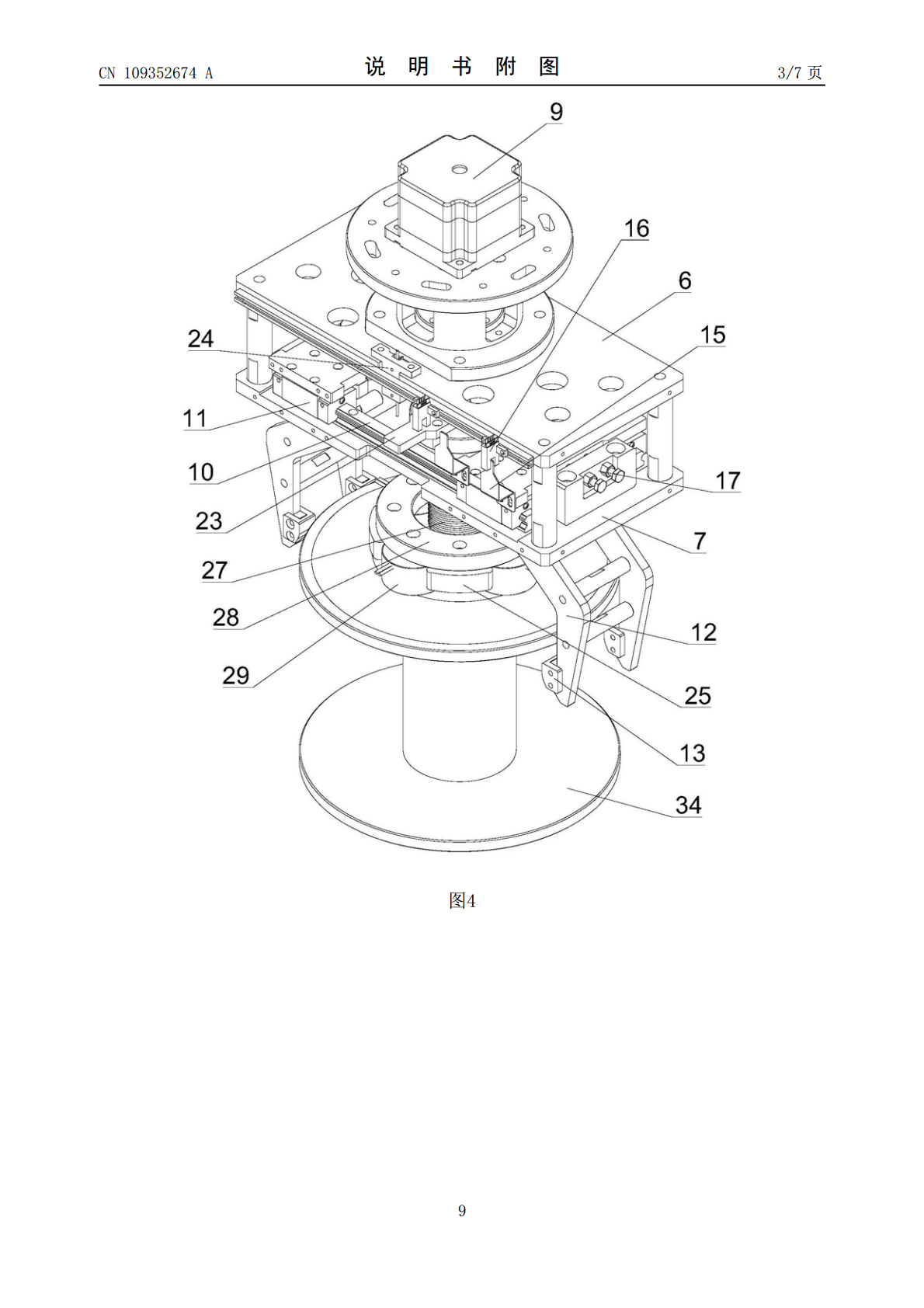
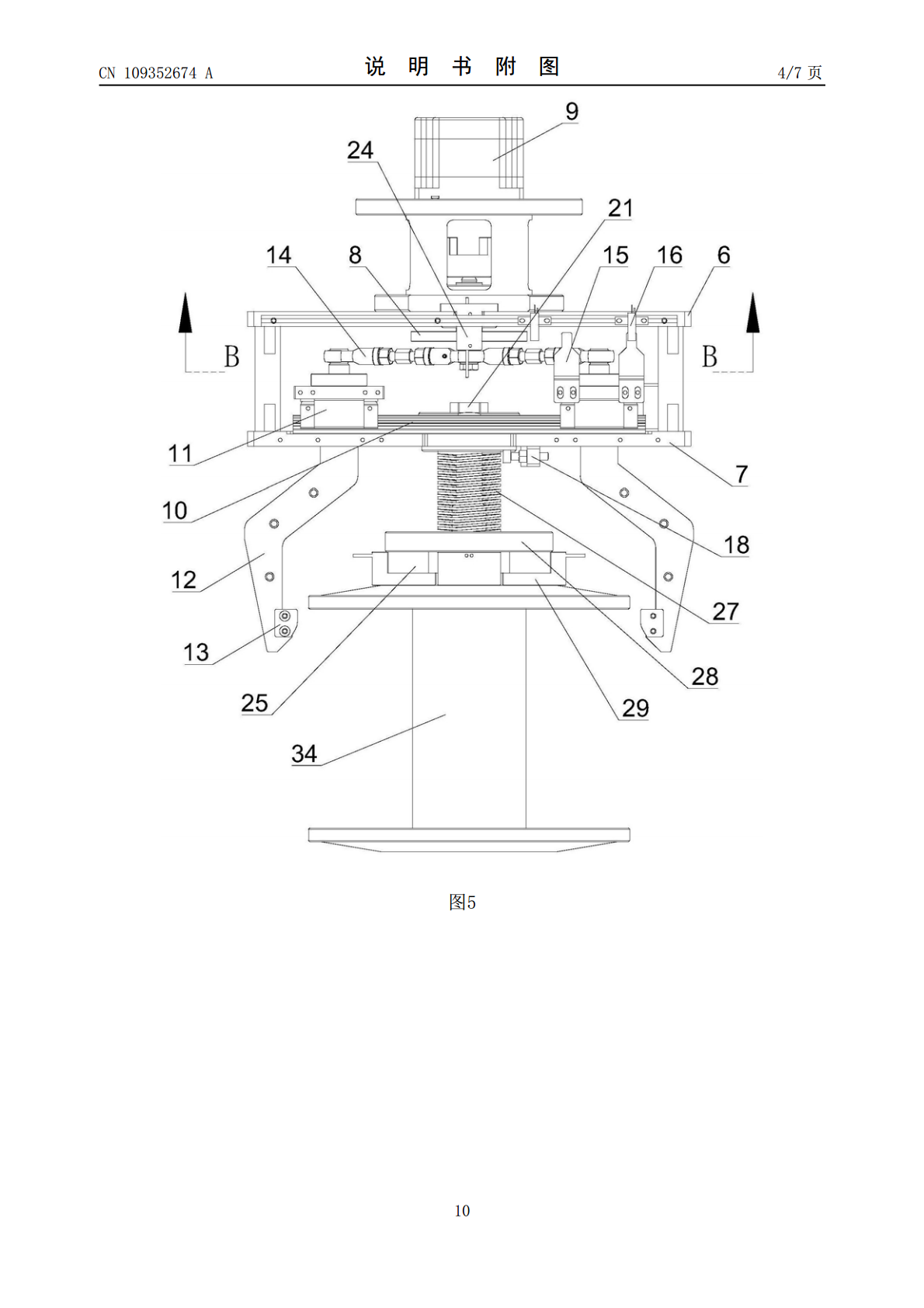
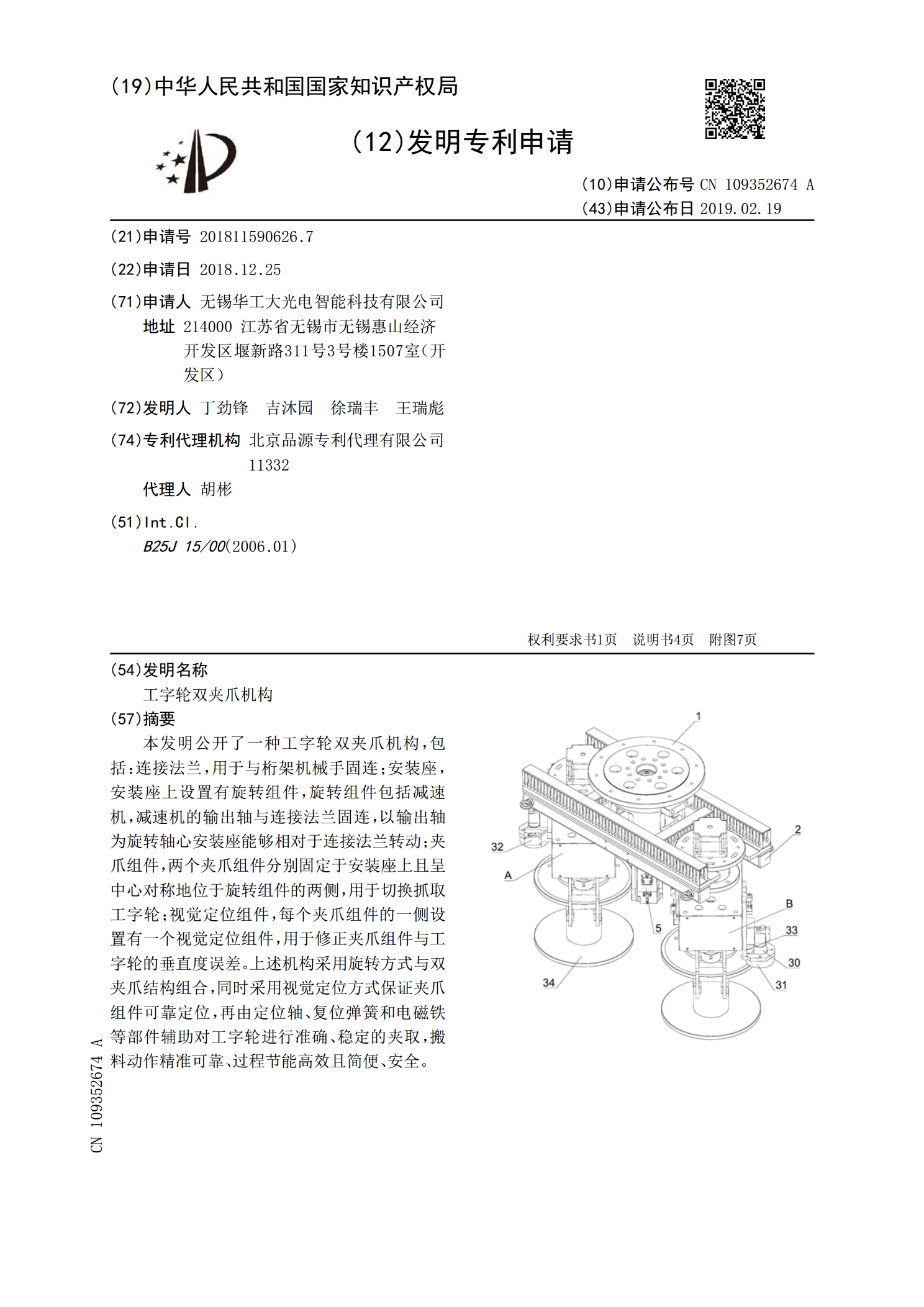
本发明公开了一种工字轮双夹爪机构,包括:连接法兰,用于与桁架机械手固连;安装座,安装座上设置有旋转组件,旋转组件包括减速机,减速机的输出轴与连接法兰固连,以输出轴为旋转轴心安装座能够相对于连接法兰转动;夹爪组件,两个夹爪组件分别固定于安装座上且呈中心对称地位于旋转组件的两侧,用于切换抓取工字轮;视觉定位组件,每个夹爪组件的一侧设置有一个视觉定位组件,用于修正夹爪组件与工字轮的垂直度误差。上述机构采用旋转方式与双夹爪结构组合,同时采用视觉定位方式保证夹爪组件可靠定位,再由定位轴、复位弹簧和电磁铁等部件辅助对
夹爪驱动机构、夹爪机构以及线束夹爪移载装置.pdf
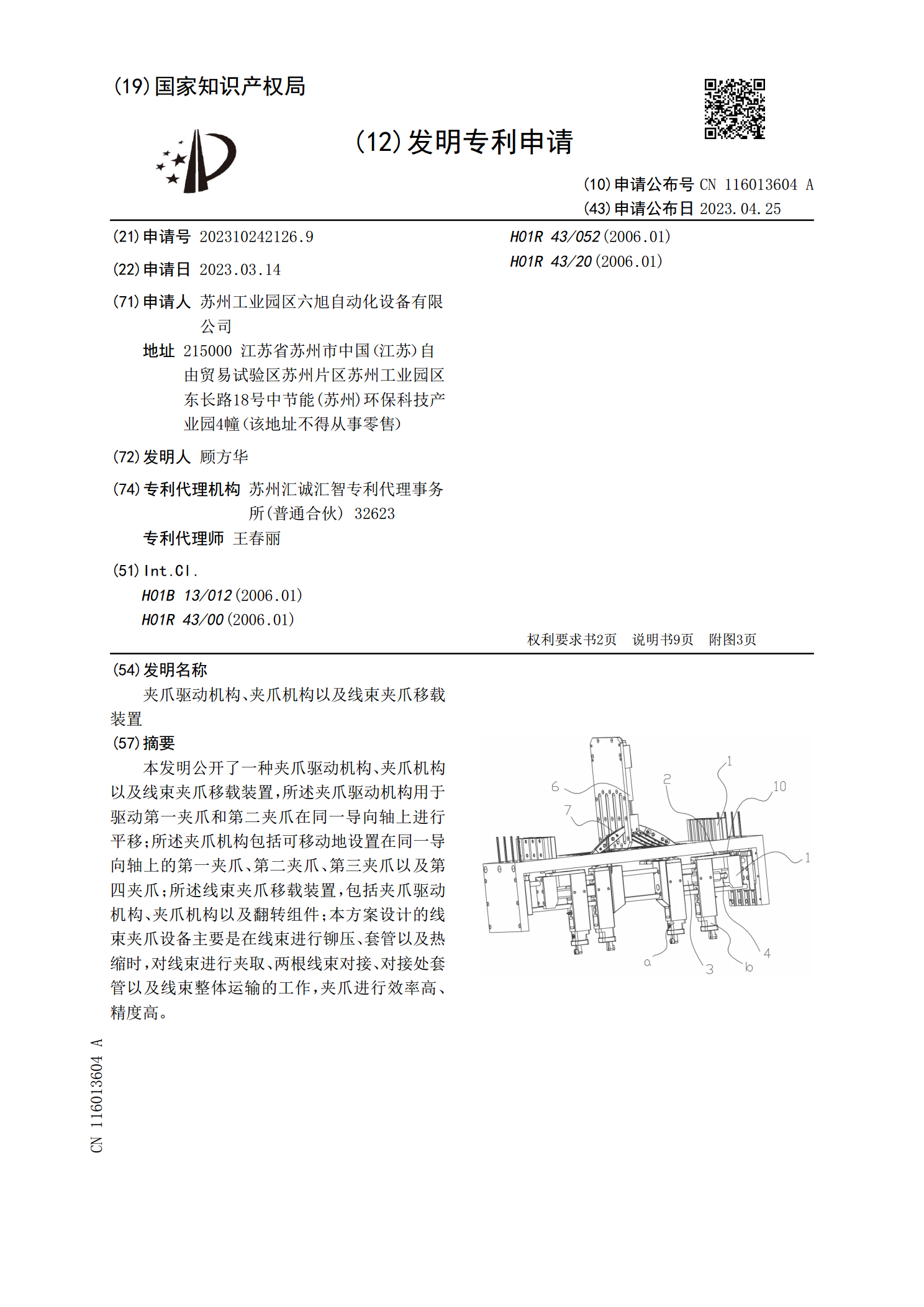
本发明公开了一种夹爪驱动机构、夹爪机构以及线束夹爪移载装置,所述夹爪驱动机构用于驱动第一夹爪和第二夹爪在同一导向轴上进行平移;所述夹爪机构包括可移动地设置在同一导向轴上的第一夹爪、第二夹爪、第三夹爪以及第四夹爪;所述线束夹爪移载装置,包括夹爪驱动机构、夹爪机构以及翻转组件;本方案设计的线束夹爪设备主要是在线束进行铆压、套管以及热缩时,对线束进行夹取、两根线束对接、对接处套管以及线束整体运输的工作,夹爪进行效率高、精度高。
一种单缸驱动的双夹爪机构.pdf
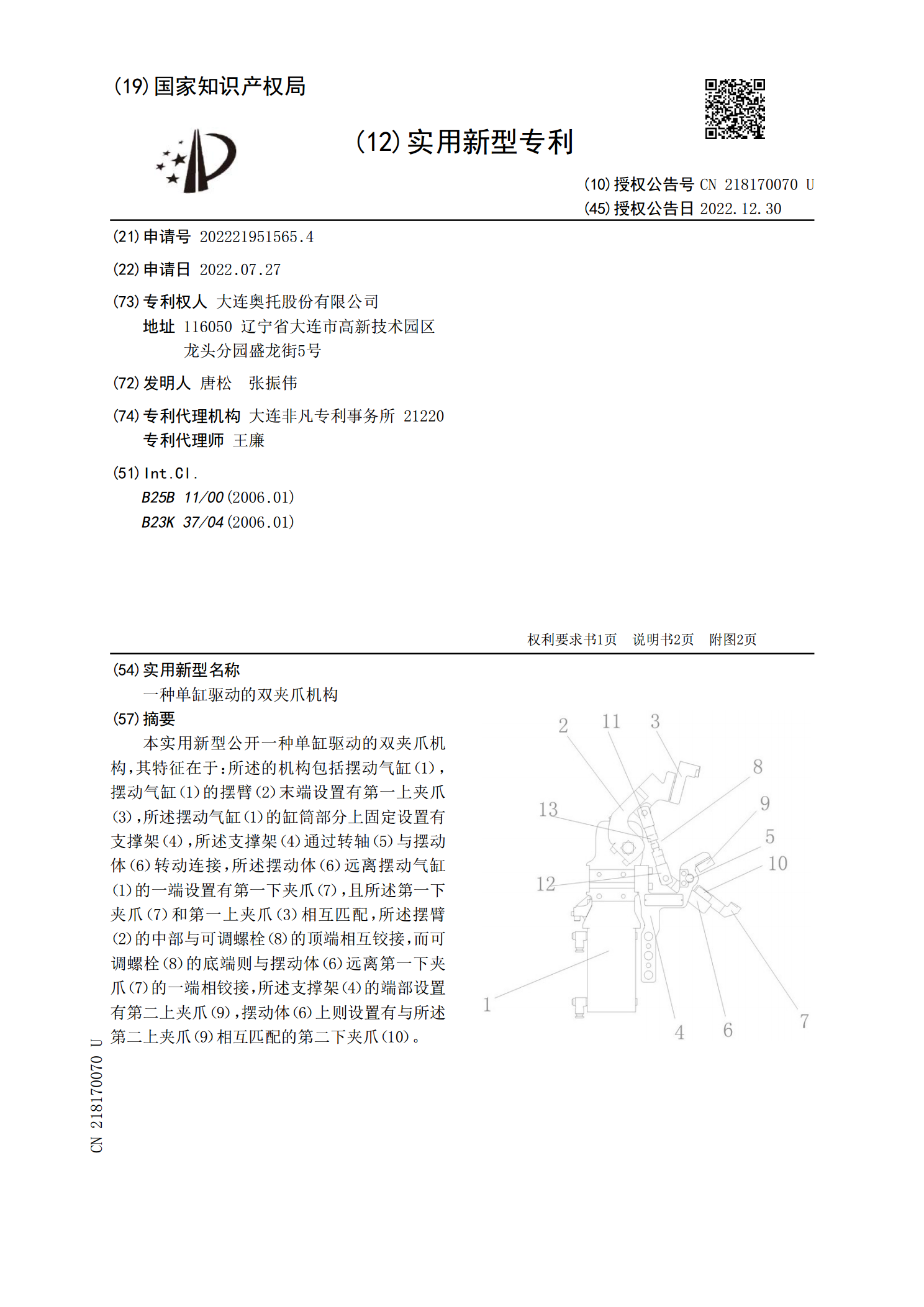
本实用新型公开一种单缸驱动的双夹爪机构,其特征在于:所述的机构包括摆动气缸(1),摆动气缸(1)的摆臂(2)末端设置有第一上夹爪(3),所述摆动气缸(1)的缸筒部分上固定设置有支撑架(4),所述支撑架(4)通过转轴(5)与摆动体(6)转动连接,所述摆动体(6)远离摆动气缸(1)的一端设置有第一下夹爪(7),且所述第一下夹爪(7)和第一上夹爪(3)相互匹配,所述摆臂(2)的中部与可调螺栓(8)的顶端相互铰接,而可调螺栓(8)的底端则与摆动体(6)远离第一下夹爪(7)的一端相铰接,所述支撑架(4)的端部设置有

变距夹爪机构.pdf
本发明公开了一种变距夹爪机构,包括夹爪开合机构和夹爪变距机构,夹爪开合机构包括基板、开合气缸、驱动板、左分距底板、右分距底板、第一线轨、第二线轨、左凸轮滚子、右凸轮滚子、左连接块、右连接块,夹爪变距机构包括第二连接块、夹爪连接块、导杆、分距限位杆、驱动滑槽块、滑动销和分距气缸,驱动滑槽块上设有左右对称的滑槽。该变距夹爪机构通过夹爪开合机构控制每对夹爪夹爪连接块的开合即夹爪的开合,同时通过夹爪变距机构控制若干对夹爪连接块之间的距离,即调节每对夹爪之间的距离,以满足产品在搬运过程中,在不同场合下需要变换物料间

一种单电磁双运动电磁夹爪机构.pdf
一种单电磁双运动电磁夹爪机构,其属于集成电路封装中引线搬送技术领域。该电磁夹爪机构的下夹爪设有第一杠杆驱动机构,上夹爪设有第二杠杆驱动机构,杠杆臂端部设有一个摩擦驱动块和复位弹簧,衔铁板端部设置一个紧靠摩擦驱动块的摩擦轮。当电磁铁通电吸引衔铁板时,第二杠杆驱动机构绕第二销轴转动,摩擦轮在上移过程中靠摩擦力驱动摩擦驱动块下移,让第一杠杆驱动机构绕第一销轴转动,使上夹爪与下夹爪共同闭合。当电磁铁断电时,上夹爪与下夹爪共同张开。该电磁夹爪机构实现了上下夹爪的共同开合,夹爪在回程过程中保持夹爪为张开状态,解决了夹