
一种轮毂电机驱动桥电机差速控制方法.pdf

一吃****永贺

1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种轮毂电机驱动桥电机差速控制方法.pdf
本发明公开了一种轮毂电机驱动桥电机差速控制方法,该方法通过判断两边轮毂电机转速差、整车油门信号、速度大小数值来判断是否进入差速模式,并且在差速模式下对两个轮毂电机的转速以及扭矩进行控制,无需额外辅助传感器,差速完全通过软件实现,没有额外的维护费用;系统更加安全,稳定,因而使得轮毂电机广泛应用于新能源成为可能。

一种多电机驱动的差速方法.pdf
本发明公开了一种多电机驱动的差速方法,机动车在驱动轮上至少安装一对左右对称的驱动电机,每一对驱动轮分别连接到同一驱动桥,一个中置电机通过电子差速器连接到一个驱动桥,如果驱动轮多于一对,驱动桥之间通过中央差速器依次连接。所述驱动电机为轮毂电机或轮边电机。所述轮边电机与驱动轮之间的传动形式是带传动、链传动或者行星齿轮传动,轮边电机输出轴与驱动轮轴平行。本发明所提供的多电机驱动的差速方法,从原理上解决了多轮边电机或轮毂电机差速的问题,电子差速可以采取最稳健的方案,大大降低了电机一致性的设计制造和选配难度,可提高

一种轮毂电机驱动混合动力汽车的电子差速控制器.pdf
本发明提供了一种轮毂电机驱动混合动力汽车的电子差速控制器,属于汽车技术领域。它解决了现有技术中电子差速控制器控制效果不够理想,不够科学准确的问题。该控制器包括后轮力矩增量计算模块、轮毂电机力矩计算模块和差速控制模块,后轮力矩增量计算模块的输入端连接有用于接收各种车辆信号的车辆信号接收单元,轮毂电机力矩计算模块的输入端连接有车辆行驶模式判断模块和蓄电池电量估算模块,后轮力矩增量计算模块和轮毂电机力矩计算模块的输出端均与差速控制模块连接。该控制器能够在不同驾驶条件下实现对后轮两个轮毂电机转速进行合理、有效、可
无刷电机差速调节驱动控制器、推车用无刷电机差速调节驱动控制器及一种推车.pdf
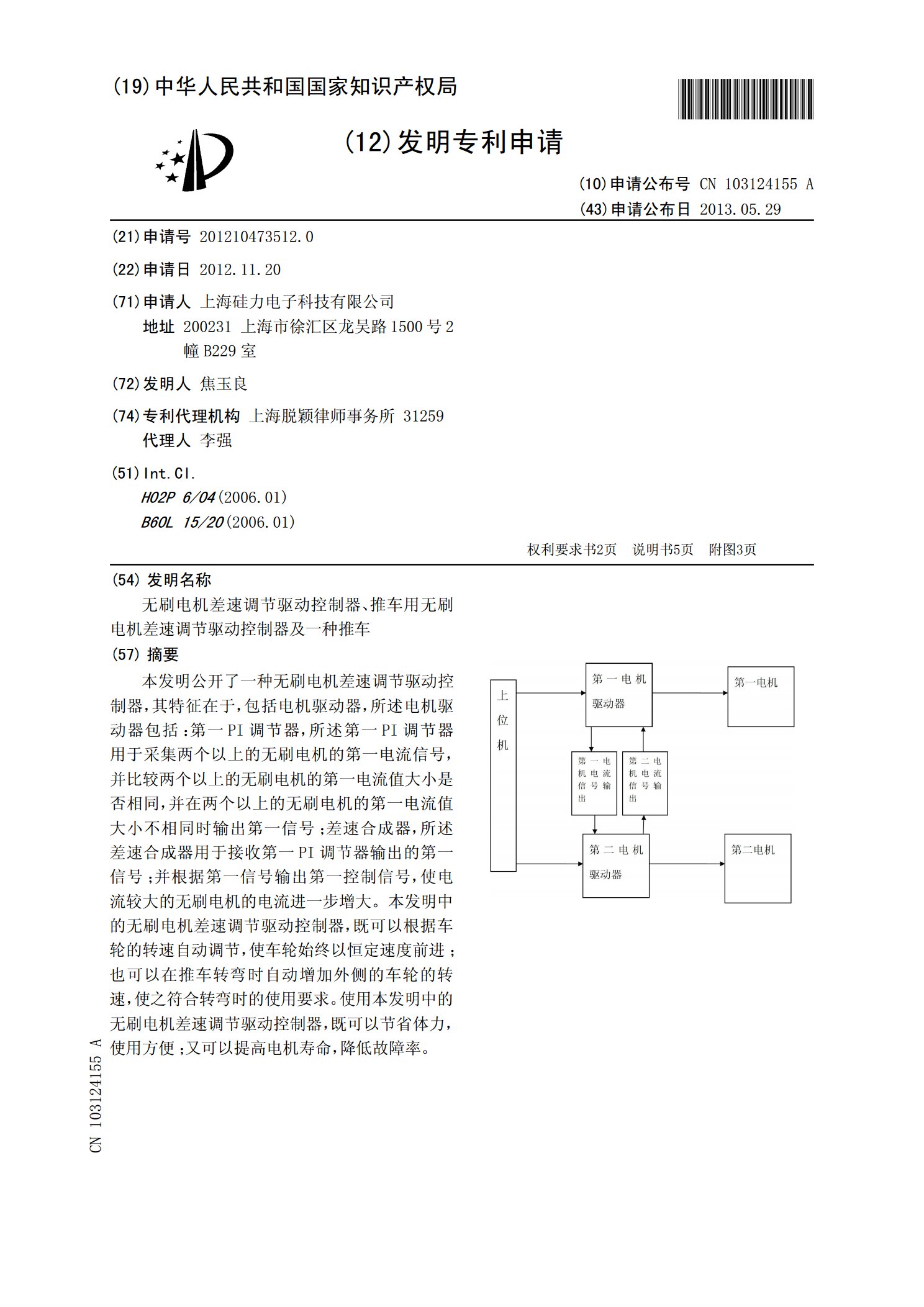
本发明公开了一种无刷电机差速调节驱动控制器,其特征在于,包括电机驱动器,所述电机驱动器包括:第一PI调节器,所述第一PI调节器用于采集两个以上的无刷电机的第一电流信号,并比较两个以上的无刷电机的第一电流值大小是否相同,并在两个以上的无刷电机的第一电流值大小不相同时输出第一信号;差速合成器,所述差速合成器用于接收第一PI调节器输出的第一信号;并根据第一信号输出第一控制信号,使电流较大的无刷电机的电流进一步增大。本发明中的无刷电机差速调节驱动控制器,既可以根据车轮的转速自动调节,使车轮始终以恒定速度前进;也可
一种电动汽车、轮毂电机及轮毂电机电子差速系统.pdf
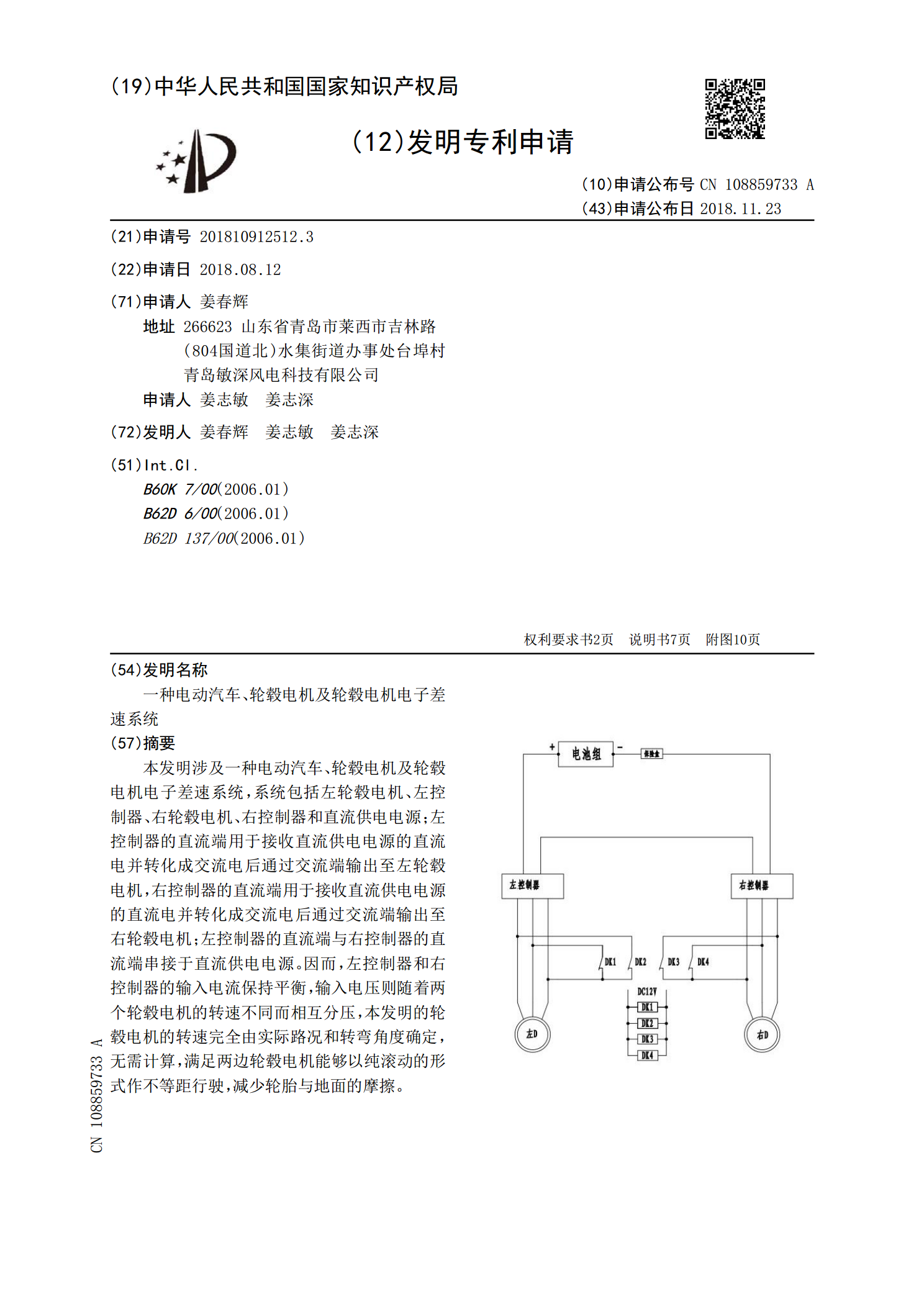
本发明涉及一种电动汽车、轮毂电机及轮毂电机电子差速系统,系统包括左轮毂电机、左控制器、右轮毂电机、右控制器和直流供电电源;左控制器的直流端用于接收直流供电电源的直流电并转化成交流电后通过交流端输出至左轮毂电机,右控制器的直流端用于接收直流供电电源的直流电并转化成交流电后通过交流端输出至右轮毂电机;左控制器的直流端与右控制器的直流端串接于直流供电电源。因而,左控制器和右控制器的输入电流保持平衡,输入电压则随着两个轮毂电机的转速不同而相互分压,本发明的轮毂电机的转速完全由实际路况和转弯角度确定,无需计算,满足