
无刷电机差速调节驱动控制器、推车用无刷电机差速调节驱动控制器及一种推车.pdf

猫巷****雪凝


1/10

2/10

3/10
4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无刷电机差速调节驱动控制器、推车用无刷电机差速调节驱动控制器及一种推车.pdf
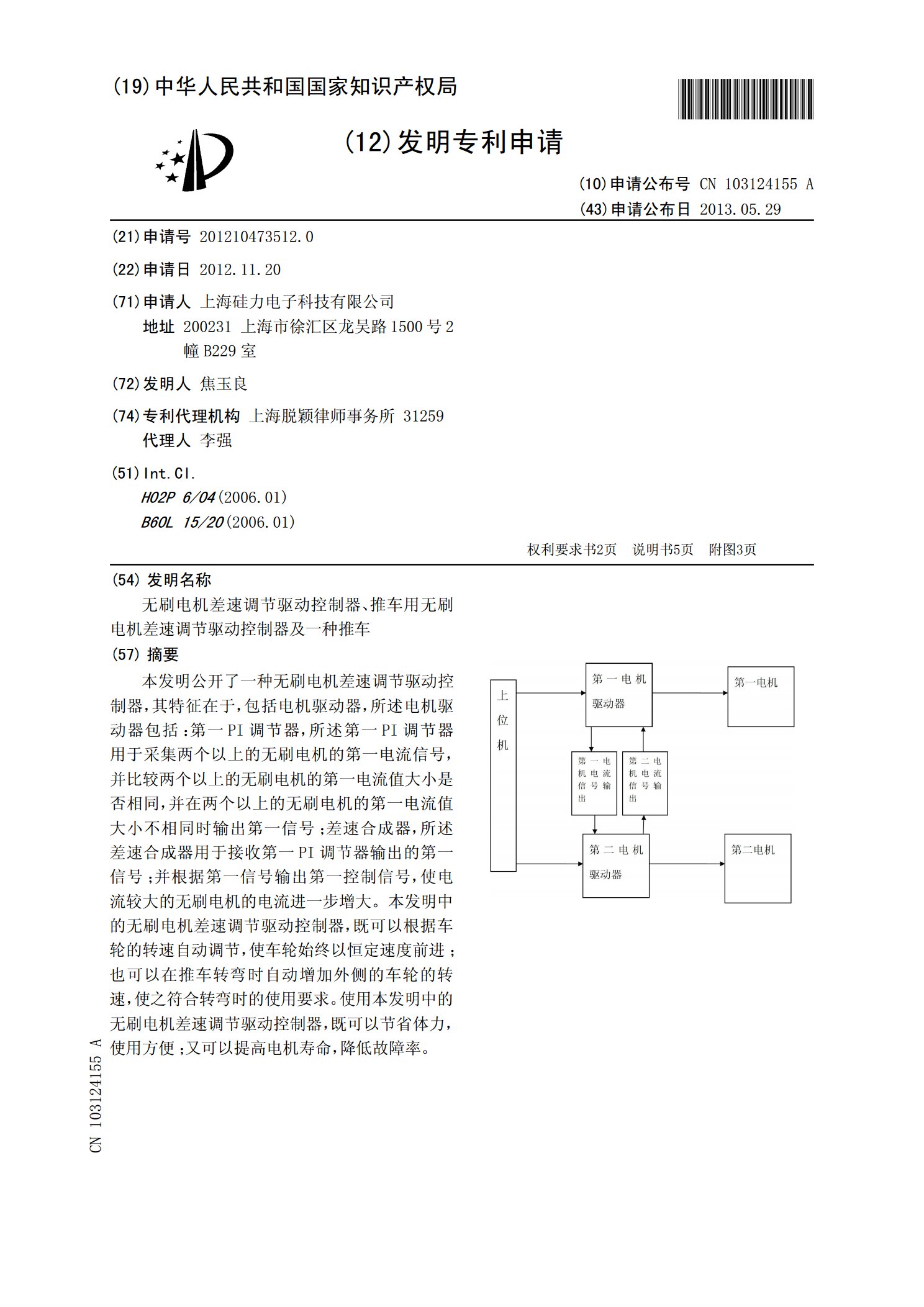
本发明公开了一种无刷电机差速调节驱动控制器,其特征在于,包括电机驱动器,所述电机驱动器包括:第一PI调节器,所述第一PI调节器用于采集两个以上的无刷电机的第一电流信号,并比较两个以上的无刷电机的第一电流值大小是否相同,并在两个以上的无刷电机的第一电流值大小不相同时输出第一信号;差速合成器,所述差速合成器用于接收第一PI调节器输出的第一信号;并根据第一信号输出第一控制信号,使电流较大的无刷电机的电流进一步增大。本发明中的无刷电机差速调节驱动控制器,既可以根据车轮的转速自动调节,使车轮始终以恒定速度前进;也可
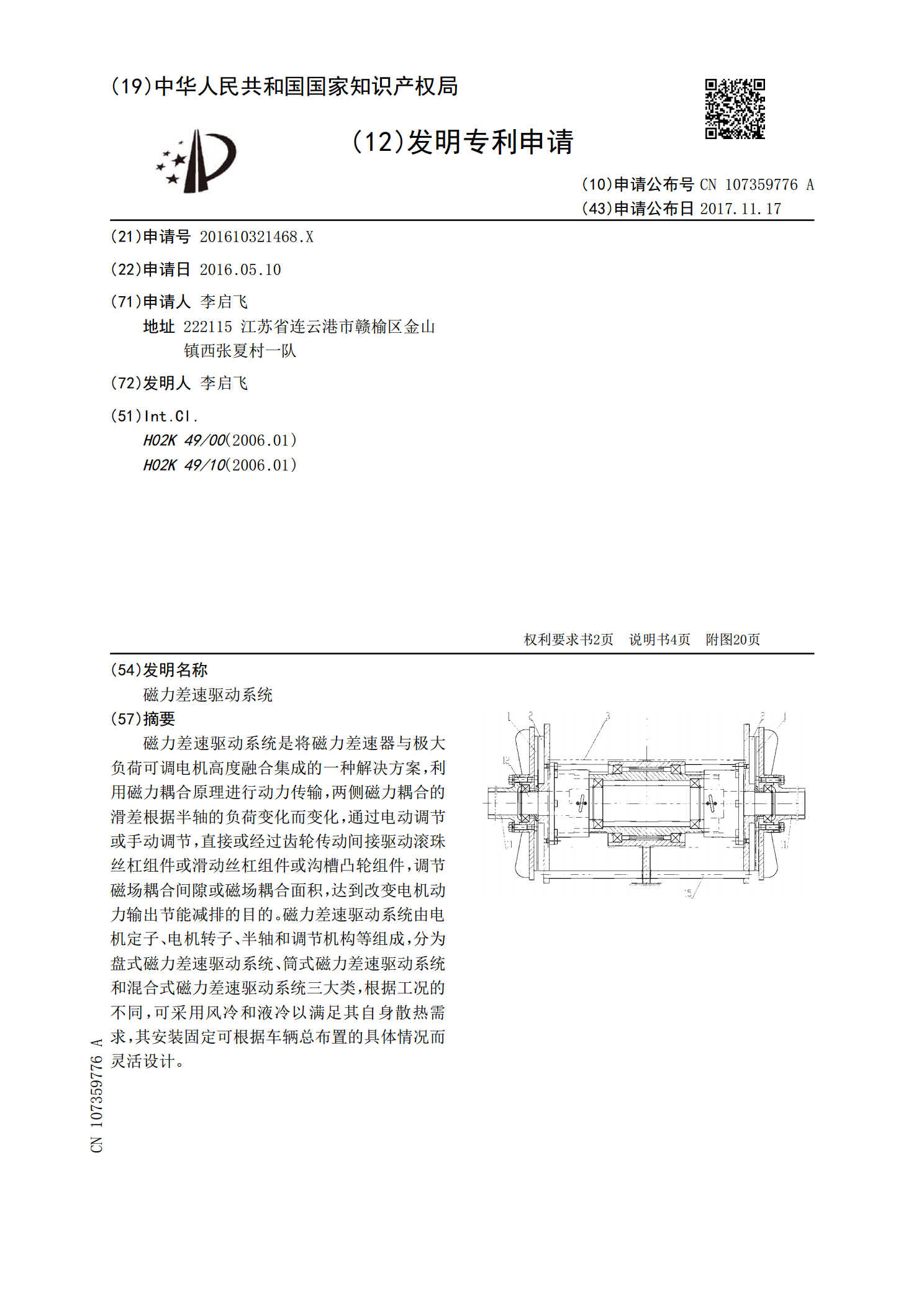
磁力差速驱动系统.pdf
磁力差速驱动系统是将磁力差速器与极大负荷可调电机高度融合集成的一种解决方案,利用磁力耦合原理进行动力传输,两侧磁力耦合的滑差根据半轴的负荷变化而变化,通过电动调节或手动调节,直接或经过齿轮传动间接驱动滚珠丝杠组件或滑动丝杠组件或沟槽凸轮组件,调节磁场耦合间隙或磁场耦合面积,达到改变电机动力输出节能减排的目的。磁力差速驱动系统由电机定子、电机转子、半轴和调节机构等组成,分为盘式磁力差速驱动系统、筒式磁力差速驱动系统和混合式磁力差速驱动系统三大类,根据工况的不同,可采用风冷和液冷以满足其自身散热需求,其安装固

一种轮毂电机驱动混合动力汽车的电子差速控制器.pdf
本发明提供了一种轮毂电机驱动混合动力汽车的电子差速控制器,属于汽车技术领域。它解决了现有技术中电子差速控制器控制效果不够理想,不够科学准确的问题。该控制器包括后轮力矩增量计算模块、轮毂电机力矩计算模块和差速控制模块,后轮力矩增量计算模块的输入端连接有用于接收各种车辆信号的车辆信号接收单元,轮毂电机力矩计算模块的输入端连接有车辆行驶模式判断模块和蓄电池电量估算模块,后轮力矩增量计算模块和轮毂电机力矩计算模块的输出端均与差速控制模块连接。该控制器能够在不同驾驶条件下实现对后轮两个轮毂电机转速进行合理、有效、可
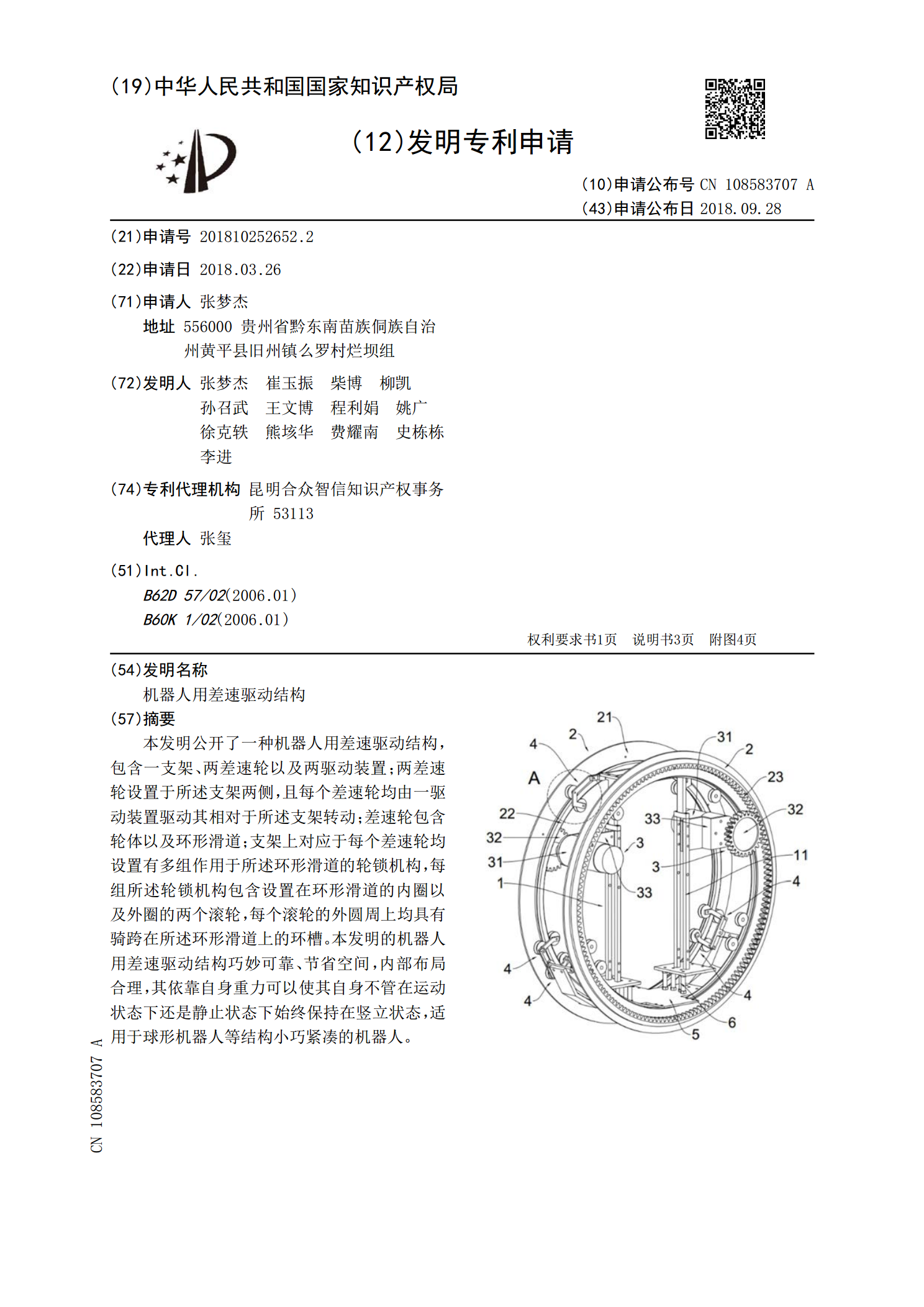
机器人用差速驱动结构.pdf
本实用新型公开了一种机器人用差速驱动结构,包含一支架、两差速轮以及两驱动装置;两差速轮设置于所述支架两侧,且每个差速轮均由一驱动装置驱动其相对于所述支架转动;差速轮包含轮体以及环形滑道;支架上对应于每个差速轮均设置有多组作用于所述环形滑道的轮锁机构,每组所述轮锁机构包含设置在环形滑道的内圈以及外圈的两个滚轮,每个滚轮的外圆周上均具有骑跨在所述环形滑道上的环槽。本实用新型的机器人用差速驱动结构巧妙可靠、节省空间,内部布局合理,其依靠自身重力可以使其自身不管在运动状态下还是静止状态下始终保持在竖立状态,适用于
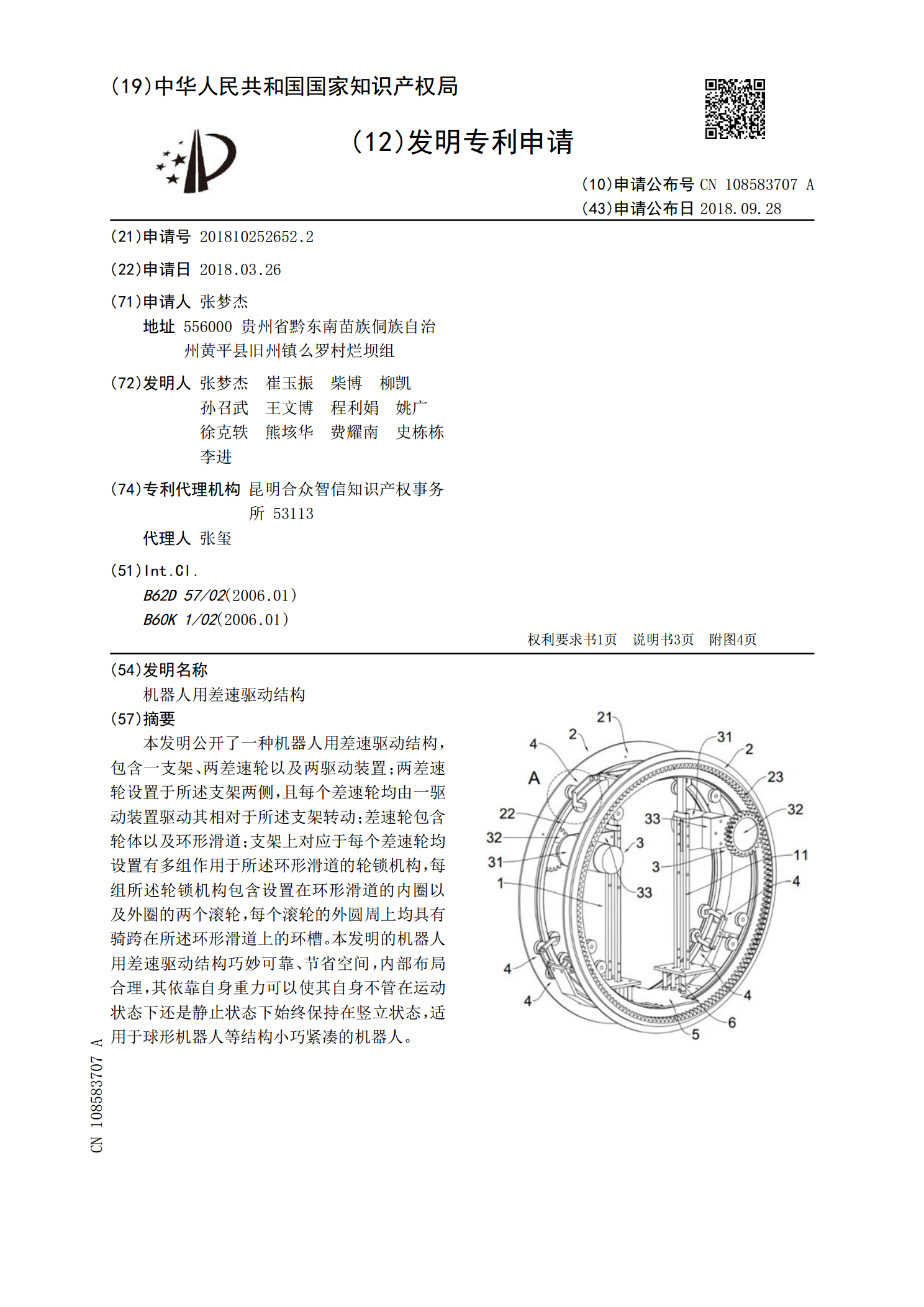
机器人用差速驱动结构.pdf
本发明公开了一种机器人用差速驱动结构,包含一支架、两差速轮以及两驱动装置;两差速轮设置于所述支架两侧,且每个差速轮均由一驱动装置驱动其相对于所述支架转动;差速轮包含轮体以及环形滑道;支架上对应于每个差速轮均设置有多组作用于所述环形滑道的轮锁机构,每组所述轮锁机构包含设置在环形滑道的内圈以及外圈的两个滚轮,每个滚轮的外圆周上均具有骑跨在所述环形滑道上的环槽。本发明的机器人用差速驱动结构巧妙可靠、节省空间,内部布局合理,其依靠自身重力可以使其自身不管在运动状态下还是静止状态下始终保持在竖立状态,适用于球形机器