
一种双舵轮AGV圆弧路径生成方法、装置及介质.pdf

小凌****甜蜜


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种双舵轮AGV圆弧路径生成方法、装置及介质.pdf
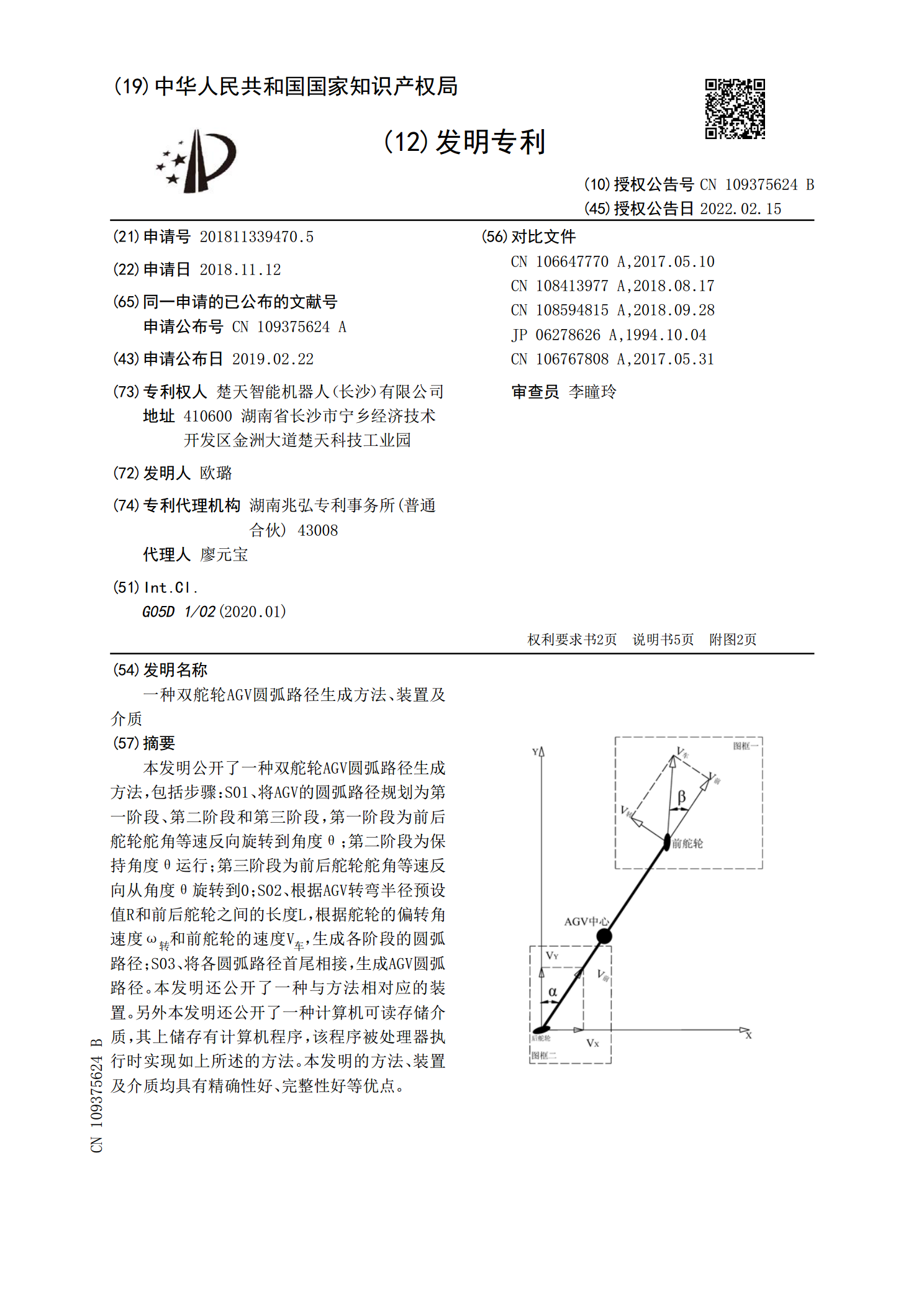
本发明公开了一种双舵轮AGV圆弧路径生成方法,包括步骤:S01、将AGV的圆弧路径规划为第一阶段、第二阶段和第三阶段,第一阶段为前后舵轮舵角等速反向旋转到角度θ;第二阶段为保持角度θ运行;第三阶段为前后舵轮舵角等速反向从角度θ旋转到0;S02、根据AGV转弯半径预设值R和前后舵轮之间的长度L,根据舵轮的偏转角速度ω
一种双舵轮AGV路径跟踪控制方法及设备、存储介质.pdf
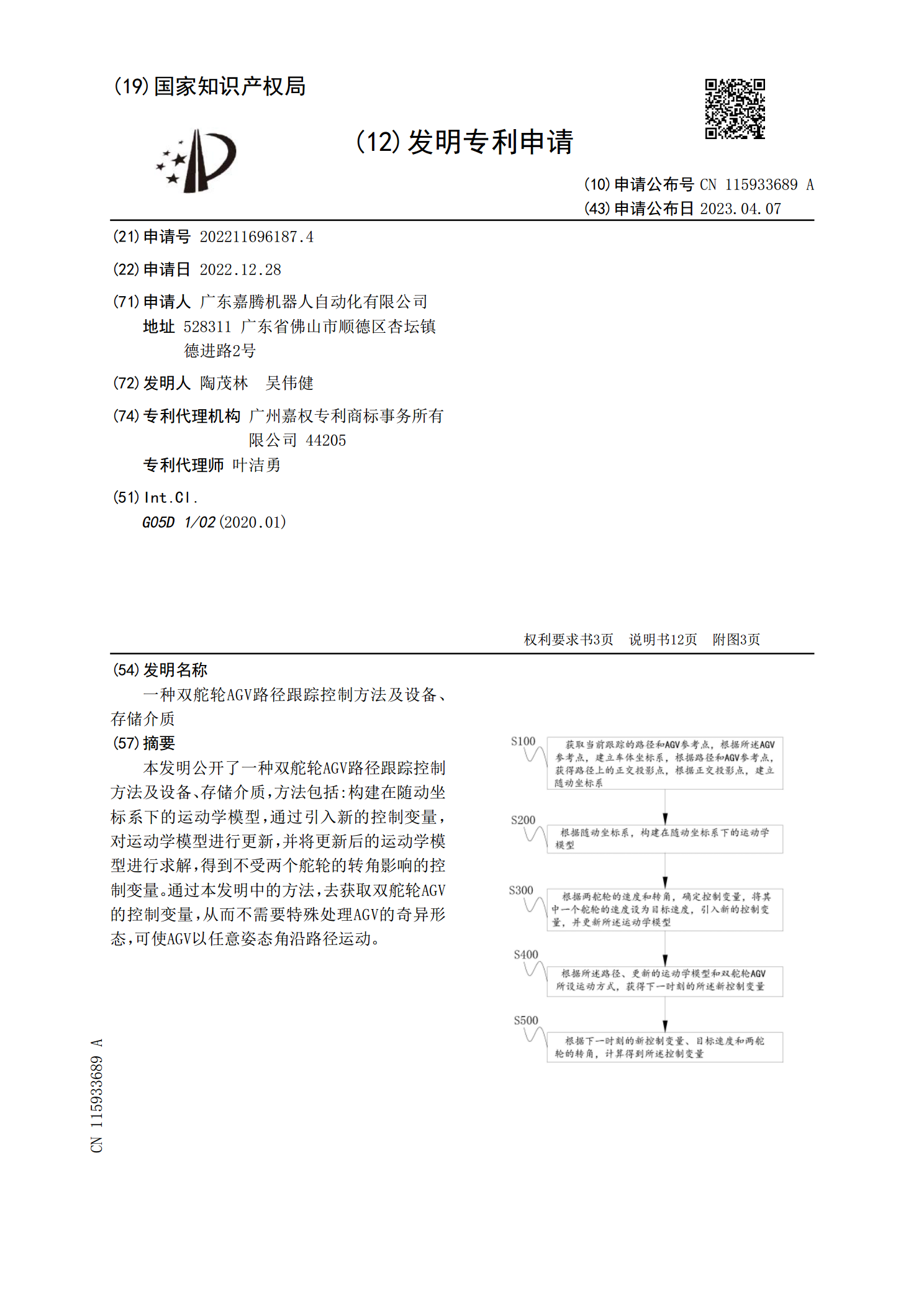
本发明公开了一种双舵轮AGV路径跟踪控制方法及设备、存储介质,方法包括:构建在随动坐标系下的运动学模型,通过引入新的控制变量,对运动学模型进行更新,并将更新后的运动学模型进行求解,得到不受两个舵轮的转角影响的控制变量。通过本发明中的方法,去获取双舵轮AGV的控制变量,从而不需要特殊处理AGV的奇异形态,可使AGV以任意姿态角沿路径运动。
AGV舵轮稳定装置及AGV舵轮.pdf
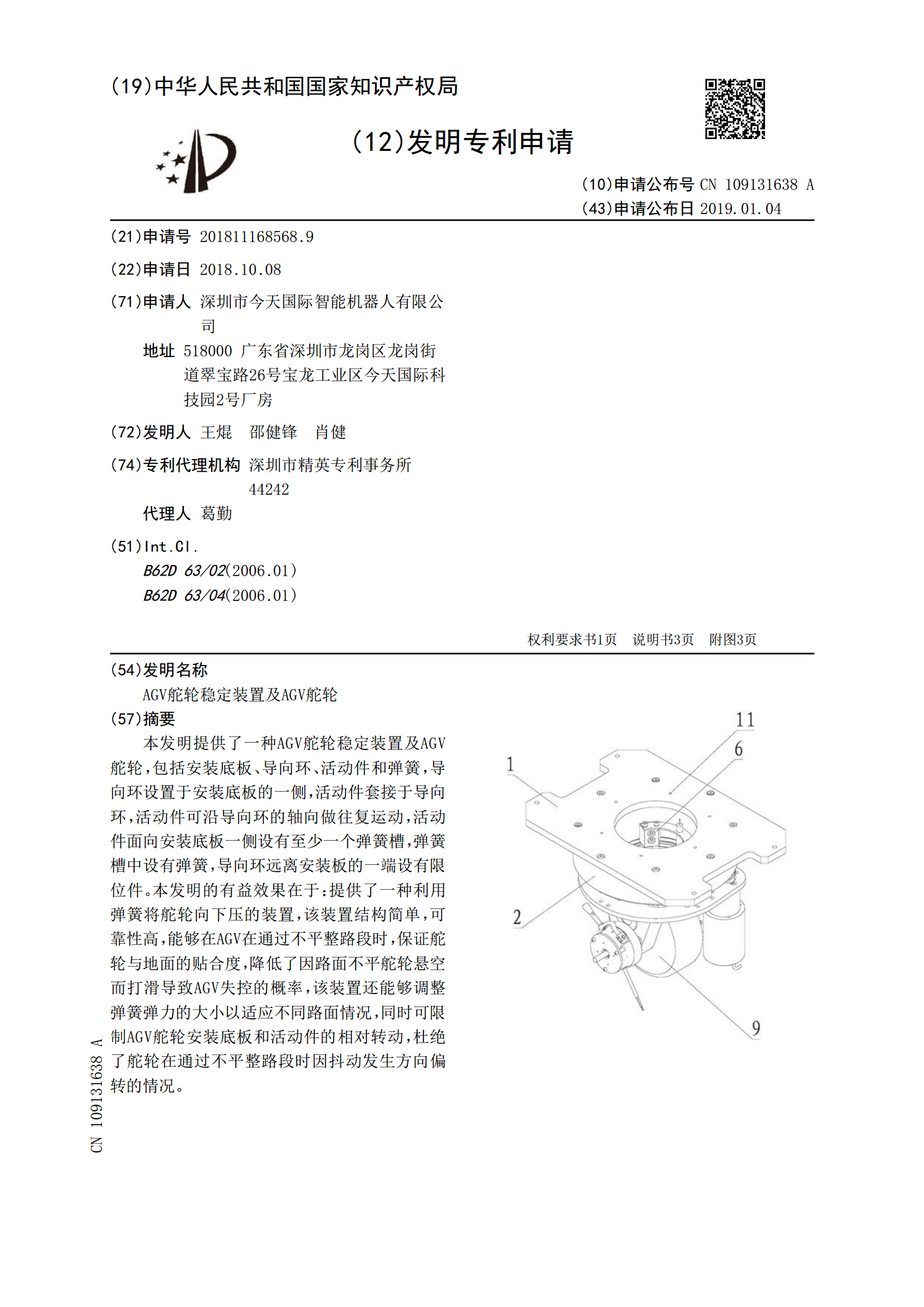
本发明提供了一种AGV舵轮稳定装置及AGV舵轮,包括安装底板、导向环、活动件和弹簧,导向环设置于安装底板的一侧,活动件套接于导向环,活动件可沿导向环的轴向做往复运动,活动件面向安装底板一侧设有至少一个弹簧槽,弹簧槽中设有弹簧,导向环远离安装板的一端设有限位件。本发明的有益效果在于:提供了一种利用弹簧将舵轮向下压的装置,该装置结构简单,可靠性高,能够在AGV在通过不平整路段时,保证舵轮与地面的贴合度,降低了因路面不平舵轮悬空而打滑导致AGV失控的概率,该装置还能够调整弹簧弹力的大小以适应不同路面情况,同时可
AGV舵轮驱动减震机构和AGV舵轮驱动装置.pdf
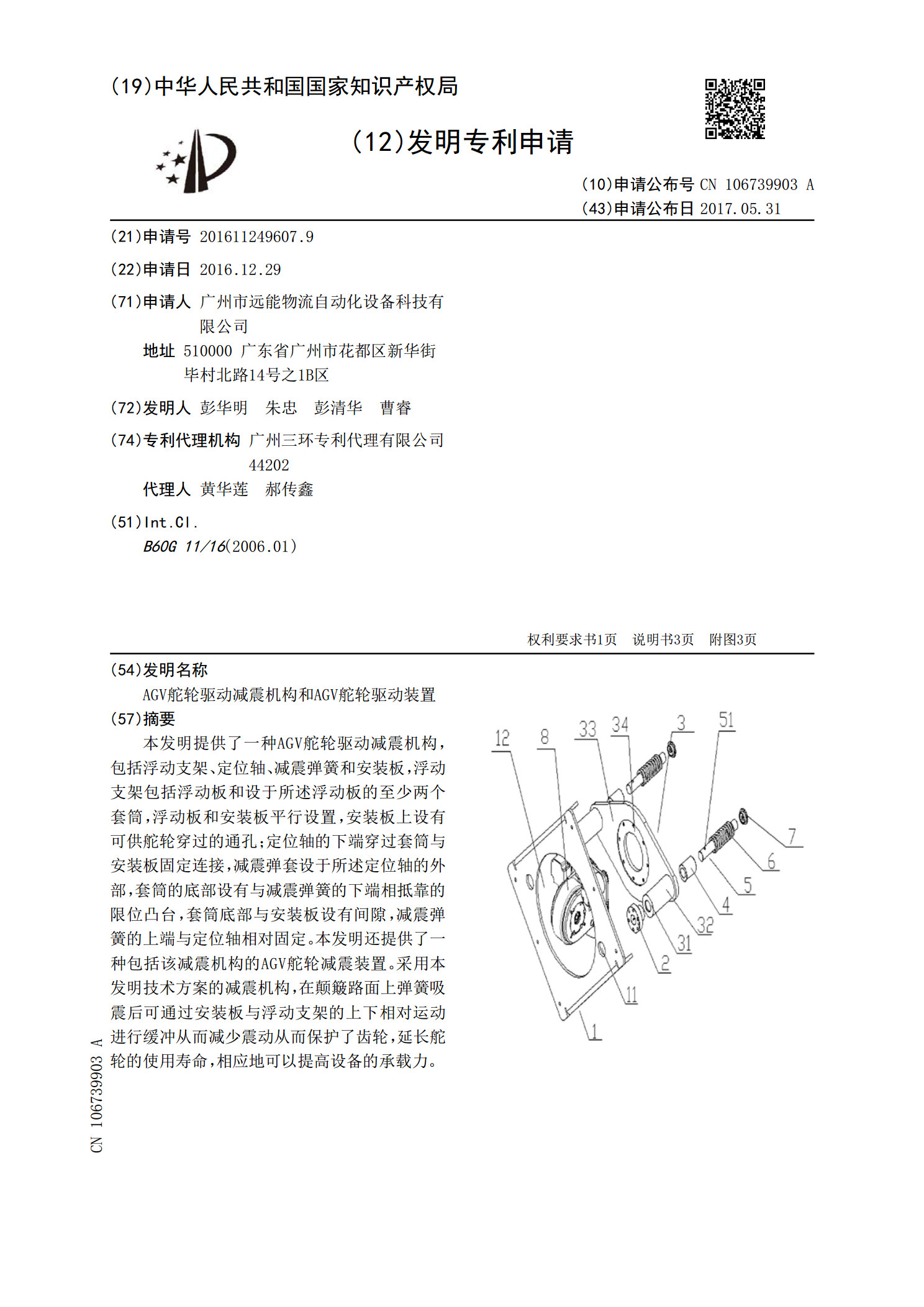
本发明提供了一种AGV舵轮驱动减震机构,包括浮动支架、定位轴、减震弹簧和安装板,浮动支架包括浮动板和设于所述浮动板的至少两个套筒,浮动板和安装板平行设置,安装板上设有可供舵轮穿过的通孔;定位轴的下端穿过套筒与安装板固定连接,减震弹套设于所述定位轴的外部,套筒的底部设有与减震弹簧的下端相抵靠的限位凸台,套筒底部与安装板设有间隙,减震弹簧的上端与定位轴相对固定。本发明还提供了一种包括该减震机构的AGV舵轮减震装置。采用本发明技术方案的减震机构,在颠簸路面上弹簧吸震后可通过安装板与浮动支架的上下相对运动进行缓冲

一种重载AGV舵轮抬升装置.pdf
本发明公开一种重载AGV舵轮抬升装置,它主要包括梯形丝杠副、连杆、销轴、滚轮、丝杠轴承座、轴承安装座、螺帽安装座、滚轮导轨、连杆后支座、底板和上支撑板;底板安装在AGV车架体上;底部连杆通过销轴安装在底板耳轴座处;轴承安装座、滚轮导轨和连杆后支座固连成矩形框架;上部后侧连杆通过销轴与连杆后支座连接;上部前侧两个连杆通过螺帽安装座连接;两个滚轮固定在螺帽安装座两侧并与滚轮导轨配合;丝杠轴承座安装在轴承安装座上;梯形丝杠副安装在螺帽安装座上,与丝杠轴承座配合;上支撑板通过销轴与上部连杆连接。本申请提供的舵轮抬