
一种双舵轮AGV路径跟踪控制方法及设备、存储介质.pdf

是你****优呀

1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种双舵轮AGV路径跟踪控制方法及设备、存储介质.pdf
本发明公开了一种双舵轮AGV路径跟踪控制方法及设备、存储介质,方法包括:构建在随动坐标系下的运动学模型,通过引入新的控制变量,对运动学模型进行更新,并将更新后的运动学模型进行求解,得到不受两个舵轮的转角影响的控制变量。通过本发明中的方法,去获取双舵轮AGV的控制变量,从而不需要特殊处理AGV的奇异形态,可使AGV以任意姿态角沿路径运动。
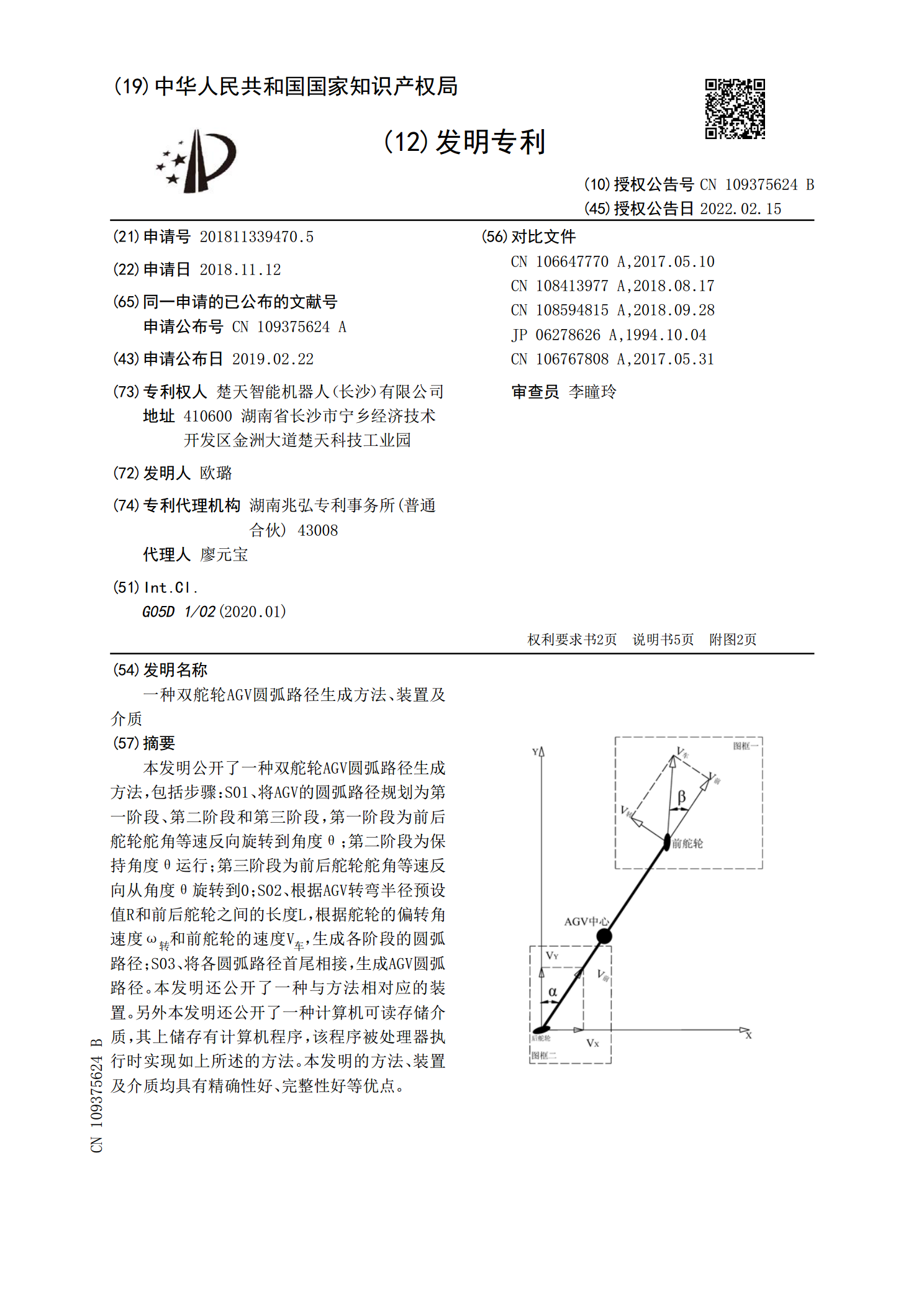
一种双舵轮AGV圆弧路径生成方法、装置及介质.pdf
本发明公开了一种双舵轮AGV圆弧路径生成方法,包括步骤:S01、将AGV的圆弧路径规划为第一阶段、第二阶段和第三阶段,第一阶段为前后舵轮舵角等速反向旋转到角度θ;第二阶段为保持角度θ运行;第三阶段为前后舵轮舵角等速反向从角度θ旋转到0;S02、根据AGV转弯半径预设值R和前后舵轮之间的长度L,根据舵轮的偏转角速度ω

一种AGV舵轮自动标定方法、控制系统及存储介质.pdf
本发明公开了一种AGV舵轮自动标定方法、控制系统及存储介质,该方法包括:根据AGV在地图坐标下直行第一预设距离后的车身姿态偏差角控制AGV的一侧舵轮摆动,直至AGV的舵轮平行;根据AGV在地图坐标下直行第二预设距离后的车身位置偏差角控制AGV的舵轮同时摆动,直至AGV的舵轮和车身方向平行。通过实施本发明,在地图坐标下,控制AGV进行直线运动,通过车身姿态的校准以及车身位置的校准,实现了AGV舵轮零位的自动标定。因此本发明实施例提供的AGV舵轮自动标定方法,以3D激光定位数据取代人的肉眼观察,提高标定精度;
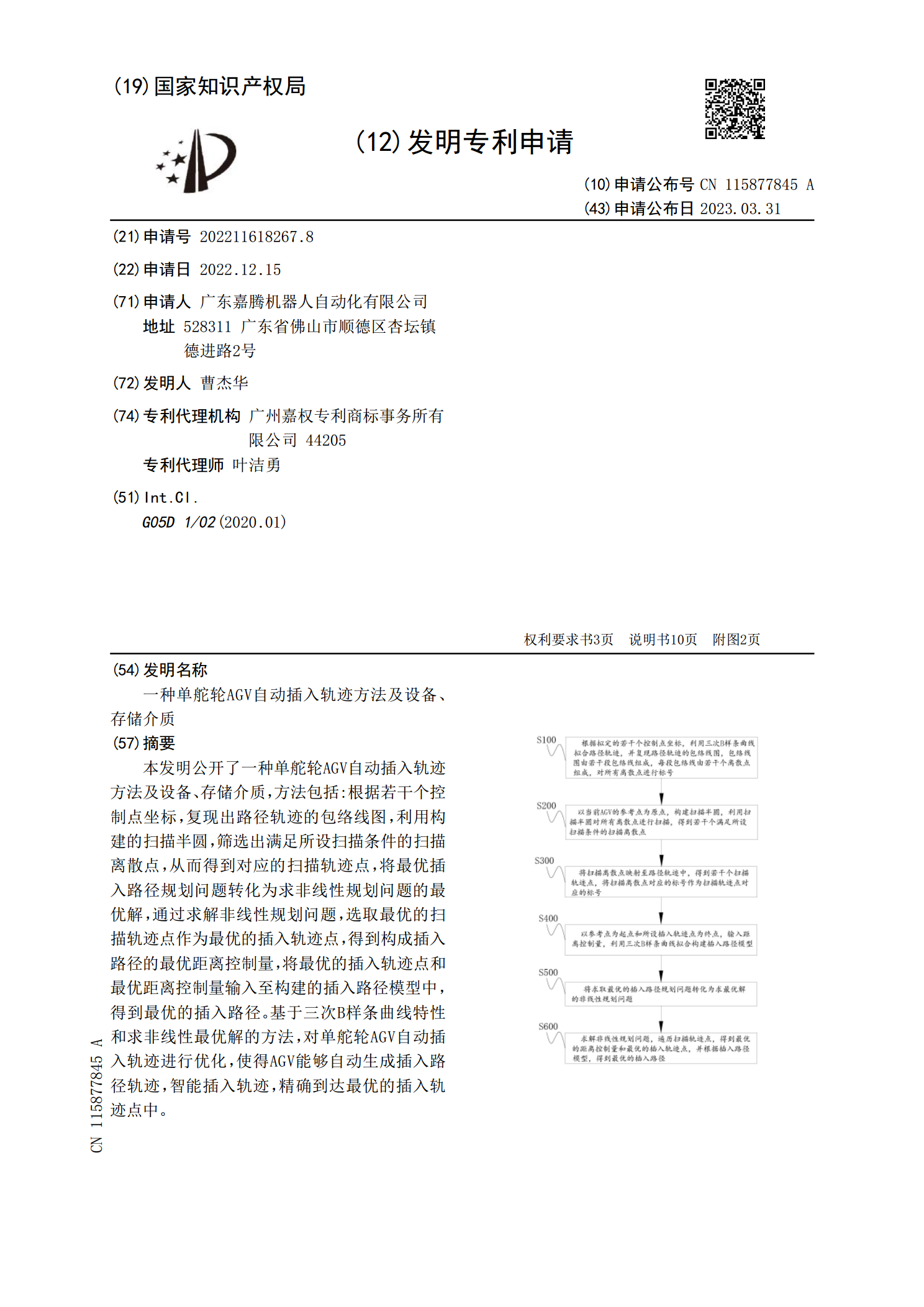
一种单舵轮AGV自动插入轨迹方法及设备、存储介质.pdf
本发明公开了一种单舵轮AGV自动插入轨迹方法及设备、存储介质,方法包括:根据若干个控制点坐标,复现出路径轨迹的包络线图,利用构建的扫描半圆,筛选出满足所设扫描条件的扫描离散点,从而得到对应的扫描轨迹点,将最优插入路径规划问题转化为求非线性规划问题的最优解,通过求解非线性规划问题,选取最优的扫描轨迹点作为最优的插入轨迹点,得到构成插入路径的最优距离控制量,将最优的插入轨迹点和最优距离控制量输入至构建的插入路径模型中,得到最优的插入路径。基于三次B样条曲线特性和求非线性最优解的方法,对单舵轮AGV自动插入轨迹

多差速驱动单元AGV路径跟踪方法及设备、存储介质.pdf
本发明公开了一种多差速驱动单元AGV路径跟踪方法及设备、存储介质,方法包括:根据AGV车体与路径之间的距离偏差和角度偏差,对AGV车体下每个驱动单元进行修正,得到速度矢量,再根据每个驱动单元自身的转角偏差,对各自驱动单元进行修正,得到驱动坐标系的旋转角速度,建立差速驱动单元的运动学关系,检验修正得到精确度高、误差少的每个驱动单元的左右驱动轮的设定速度。本发明针对采用无轨导航的多差速驱动单元结构的AGV,提供一种简单可靠且通用性强的路径跟踪控制方法。建立驱动单元的驱动坐标系,不依赖于驱动单元的布局,可使AG