
全自动龙门式草莓采摘机及其采摘方法.pdf

森林****来了

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
全自动龙门式草莓采摘机及其采摘方法.pdf
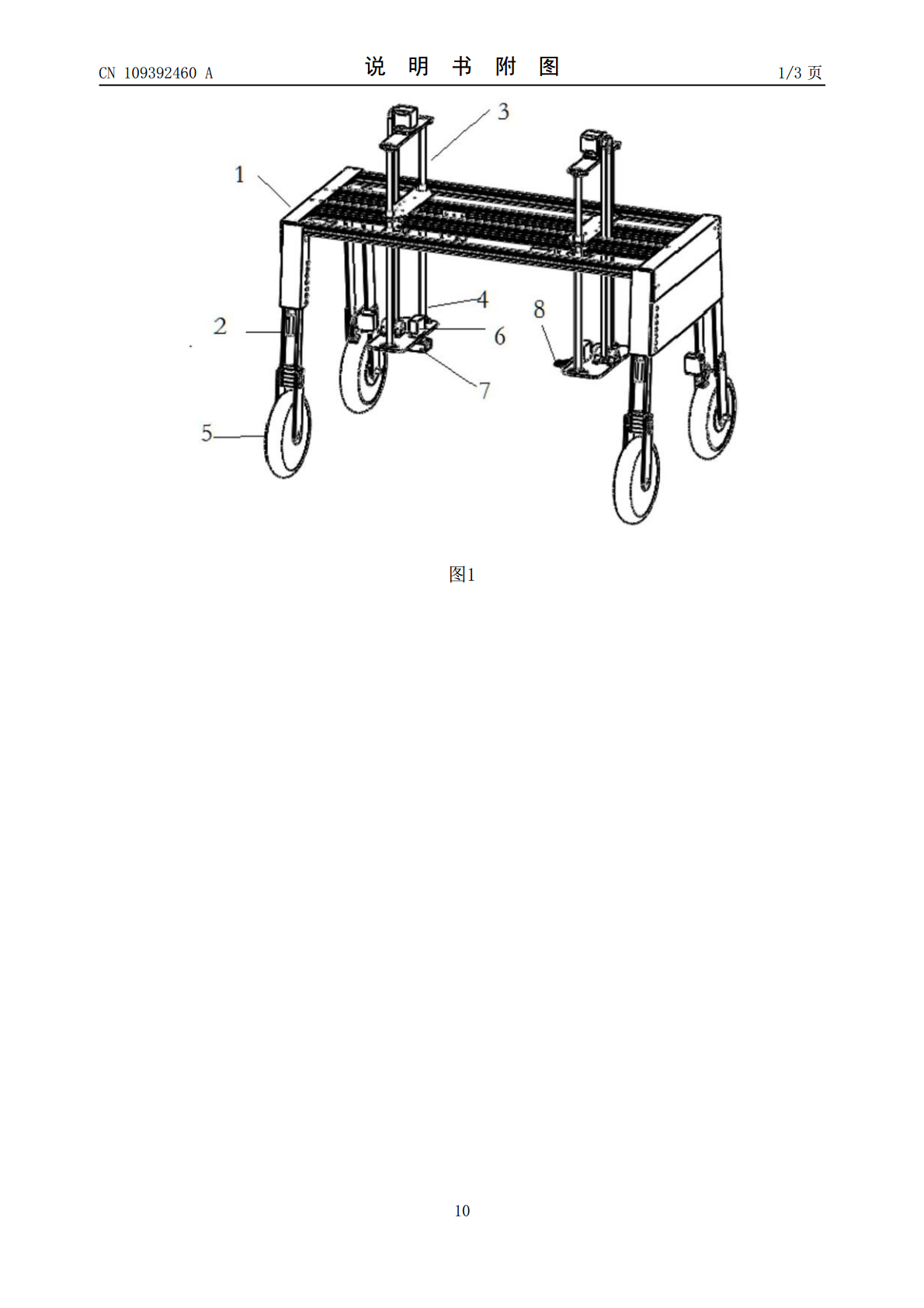
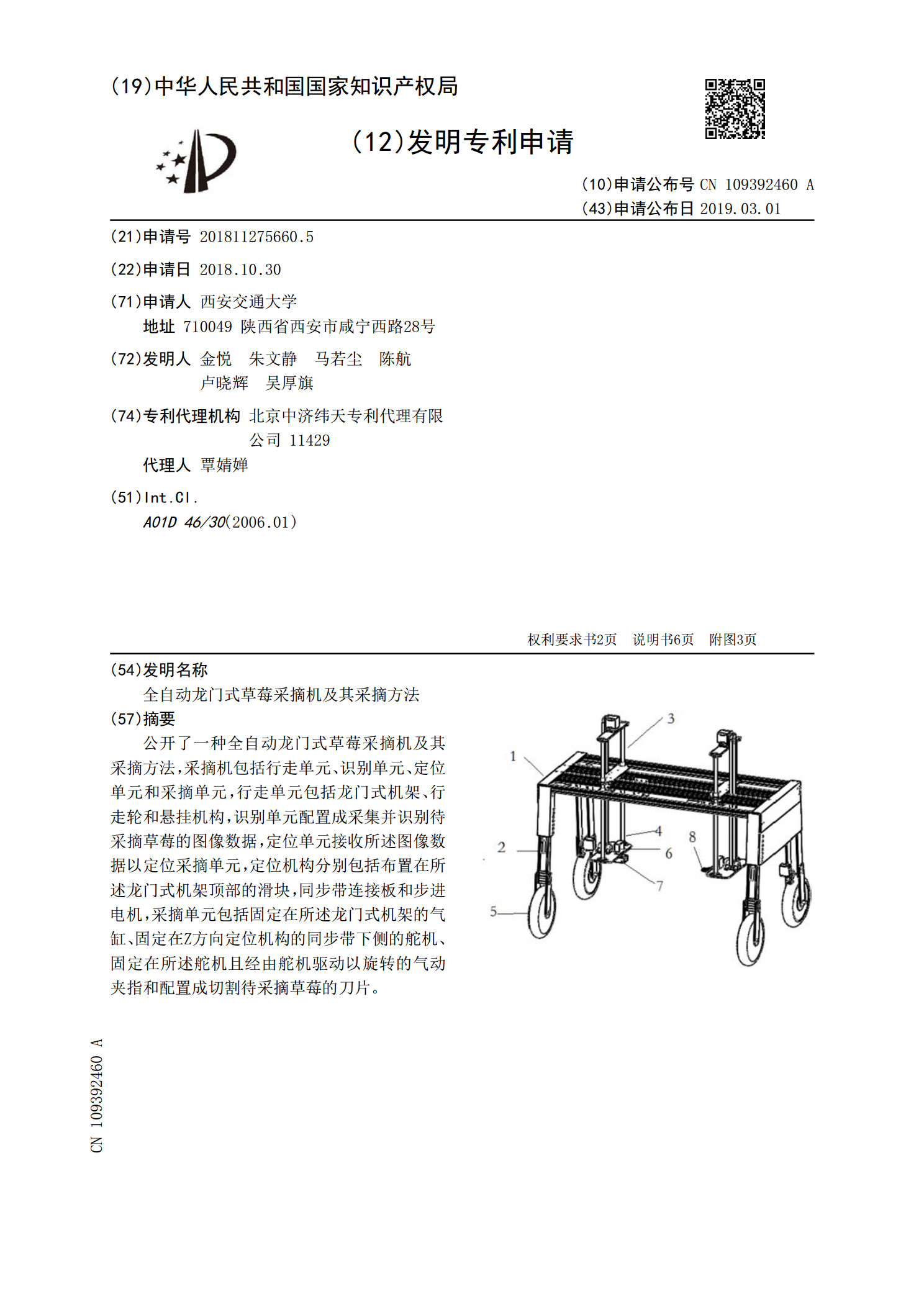
公开了一种全自动龙门式草莓采摘机及其采摘方法,采摘机包括行走单元、识别单元、定位单元和采摘单元,行走单元包括龙门式机架、行走轮和悬挂机构,识别单元配置成采集并识别待采摘草莓的图像数据,定位单元接收所述图像数据以定位采摘单元,定位机构分别包括布置在所述龙门式机架顶部的滑块,同步带连接板和步进电机,采摘单元包括固定在所述龙门式机架的气缸、固定在Z方向定位机构的同步带下侧的舵机、固定在所述舵机且经由舵机驱动以旋转的气动夹指和配置成切割待采摘草莓的刀片。
草莓采摘机.pdf
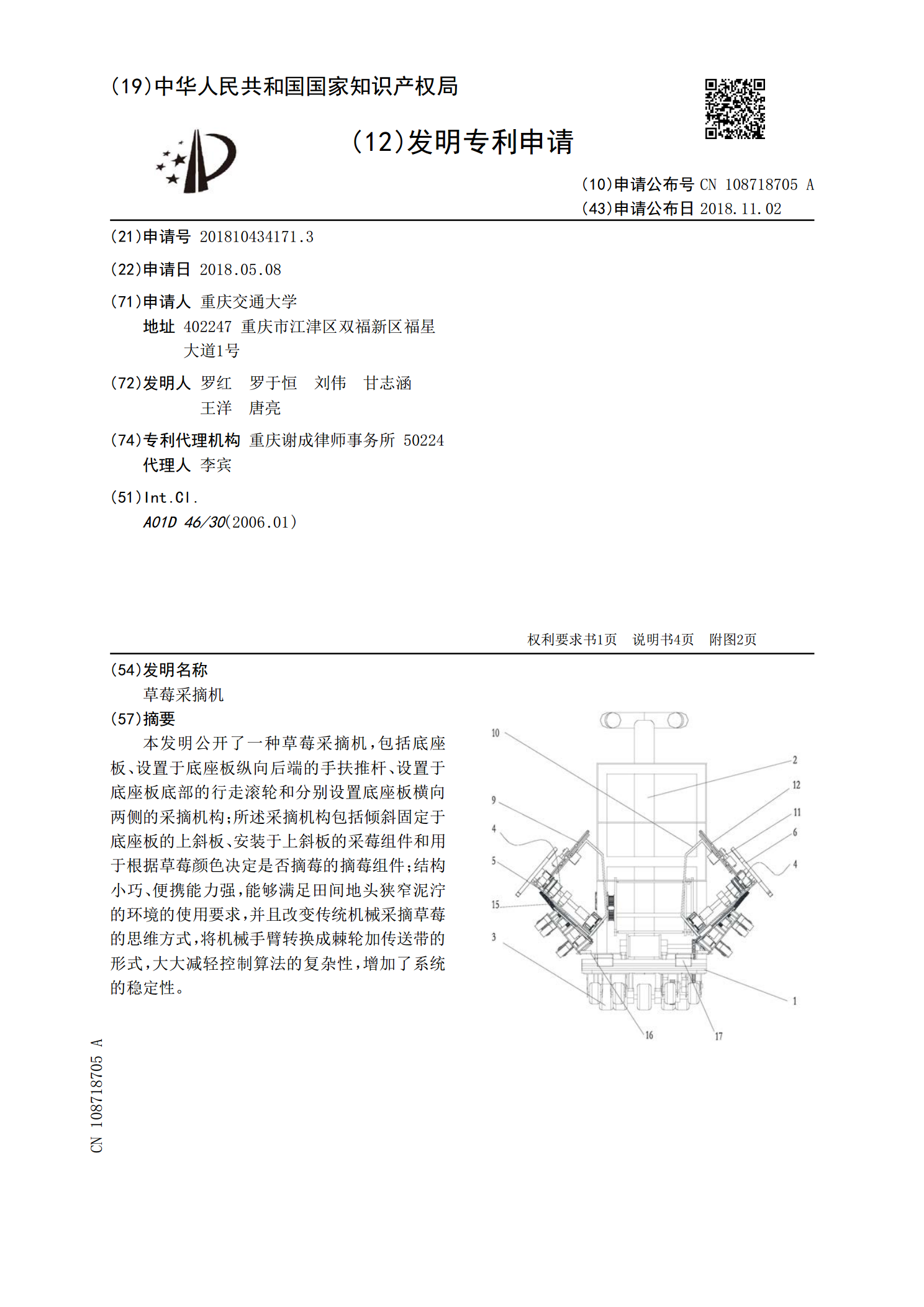
本发明公开了一种草莓采摘机,包括底座板、设置于底座板纵向后端的手扶推杆、设置于底座板底部的行走滚轮和分别设置底座板横向两侧的采摘机构;所述采摘机构包括倾斜固定于底座板的上斜板、安装于上斜板的采莓组件和用于根据草莓颜色决定是否摘莓的摘莓组件;结构小巧、便携能力强,能够满足田间地头狭窄泥泞的环境的使用要求,并且改变传统机械采摘草莓的思维方式,将机械手臂转换成棘轮加传送带的形式,大大减轻控制算法的复杂性,增加了系统的稳定性。
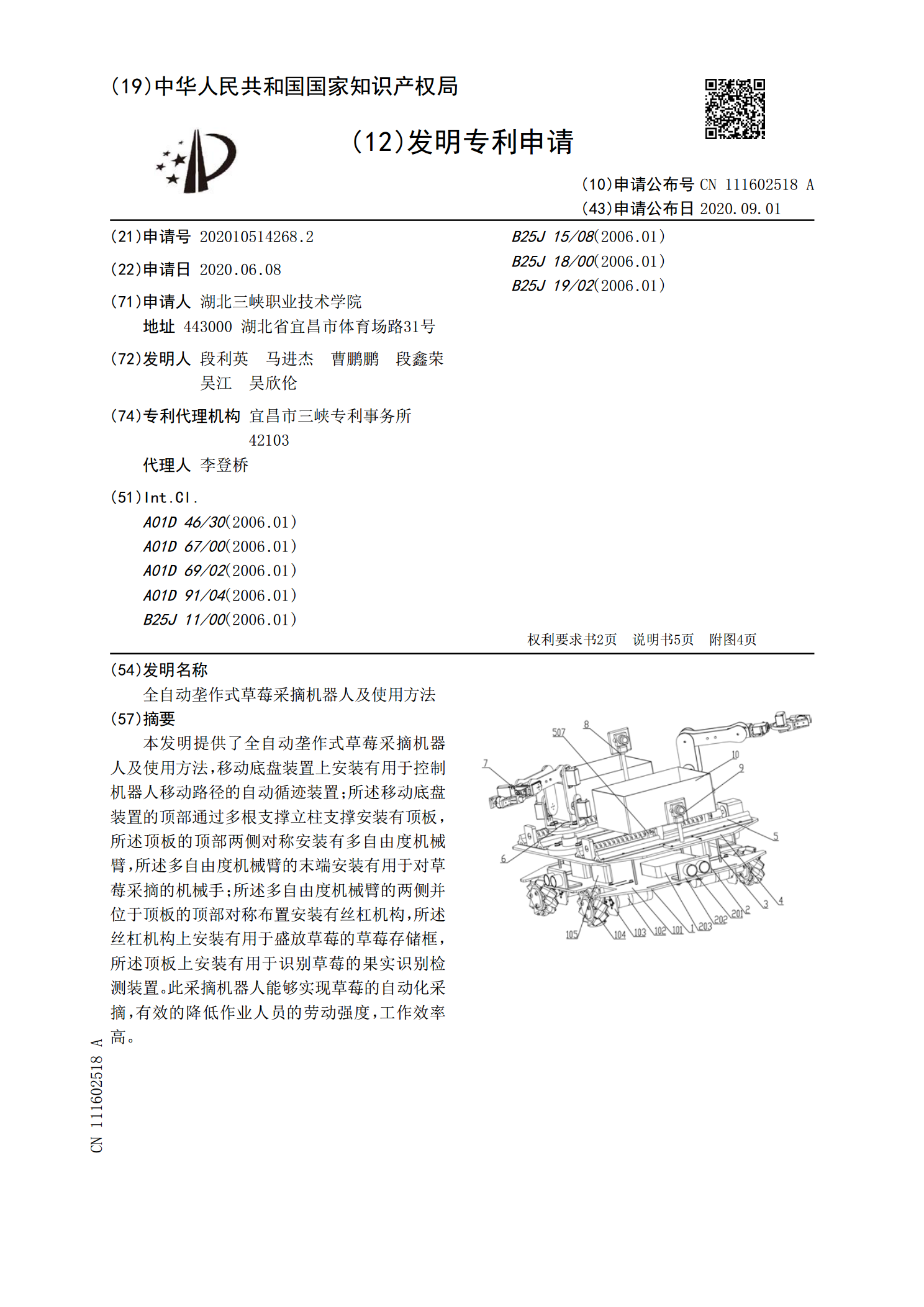
全自动垄作式草莓采摘机器人及使用方法.pdf
本发明提供了全自动垄作式草莓采摘机器人及使用方法,移动底盘装置上安装有用于控制机器人移动路径的自动循迹装置;所述移动底盘装置的顶部通过多根支撑立柱支撑安装有顶板,所述顶板的顶部两侧对称安装有多自由度机械臂,所述多自由度机械臂的末端安装有用于对草莓采摘的机械手;所述多自由度机械臂的两侧并位于顶板的顶部对称布置安装有丝杠机构,所述丝杠机构上安装有用于盛放草莓的草莓存储框,所述顶板上安装有用于识别草莓的果实识别检测装置。此采摘机器人能够实现草莓的自动化采摘,有效的降低作业人员的劳动强度,工作效率高。
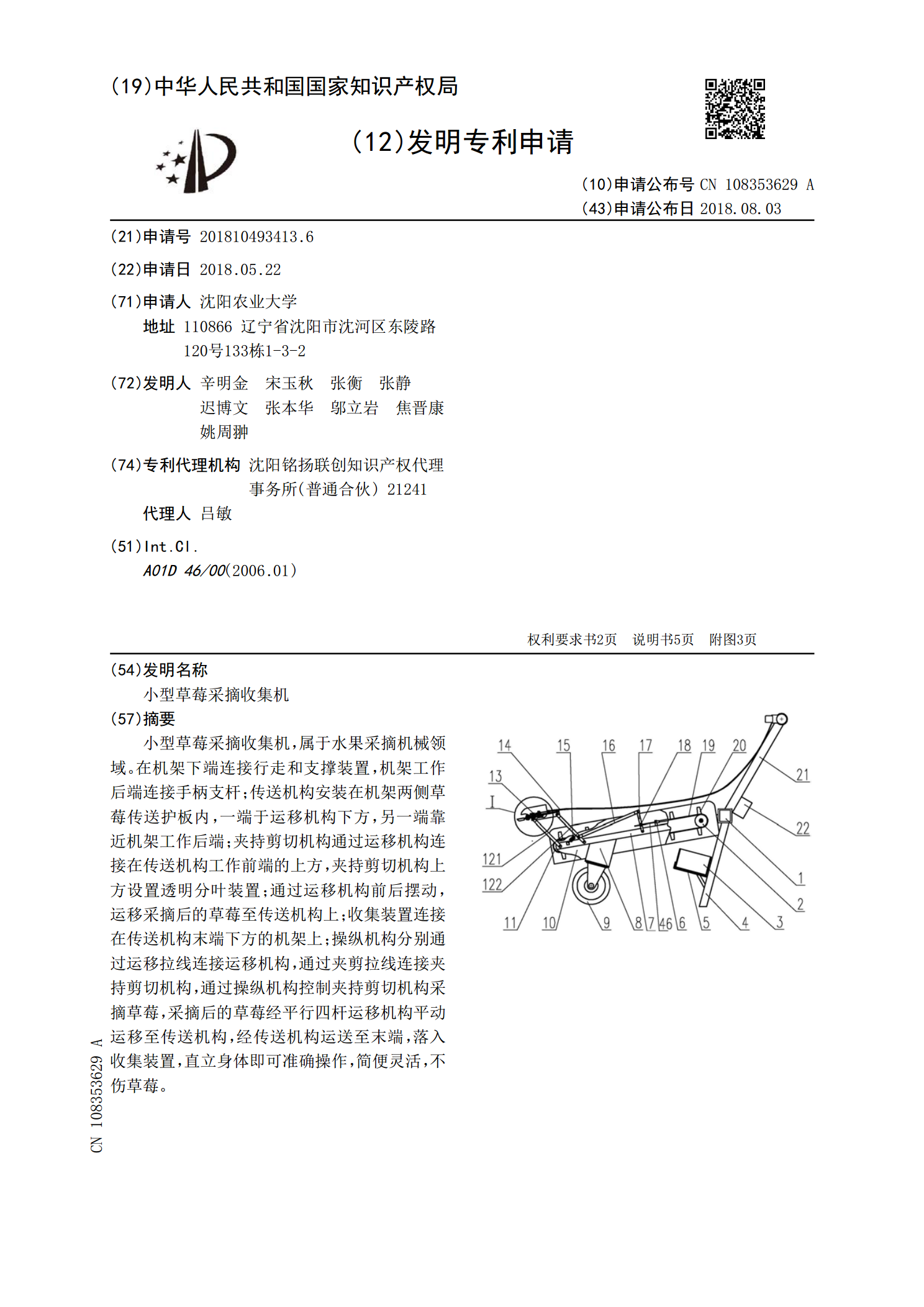
小型草莓采摘收集机.pdf
小型草莓采摘收集机,属于水果采摘机械领域。在机架下端连接行走和支撑装置,机架工作后端连接手柄支杆;传送机构安装在机架两侧草莓传送护板内,一端于运移机构下方,另一端靠近机架工作后端;夹持剪切机构通过运移机构连接在传送机构工作前端的上方,夹持剪切机构上方设置透明分叶装置;通过运移机构前后摆动,运移采摘后的草莓至传送机构上;收集装置连接在传送机构末端下方的机架上;操纵机构分别通过运移拉线连接运移机构,通过夹剪拉线连接夹持剪切机构,通过操纵机构控制夹持剪切机构采摘草莓,采摘后的草莓经平行四杆运移机构平动运移至传送
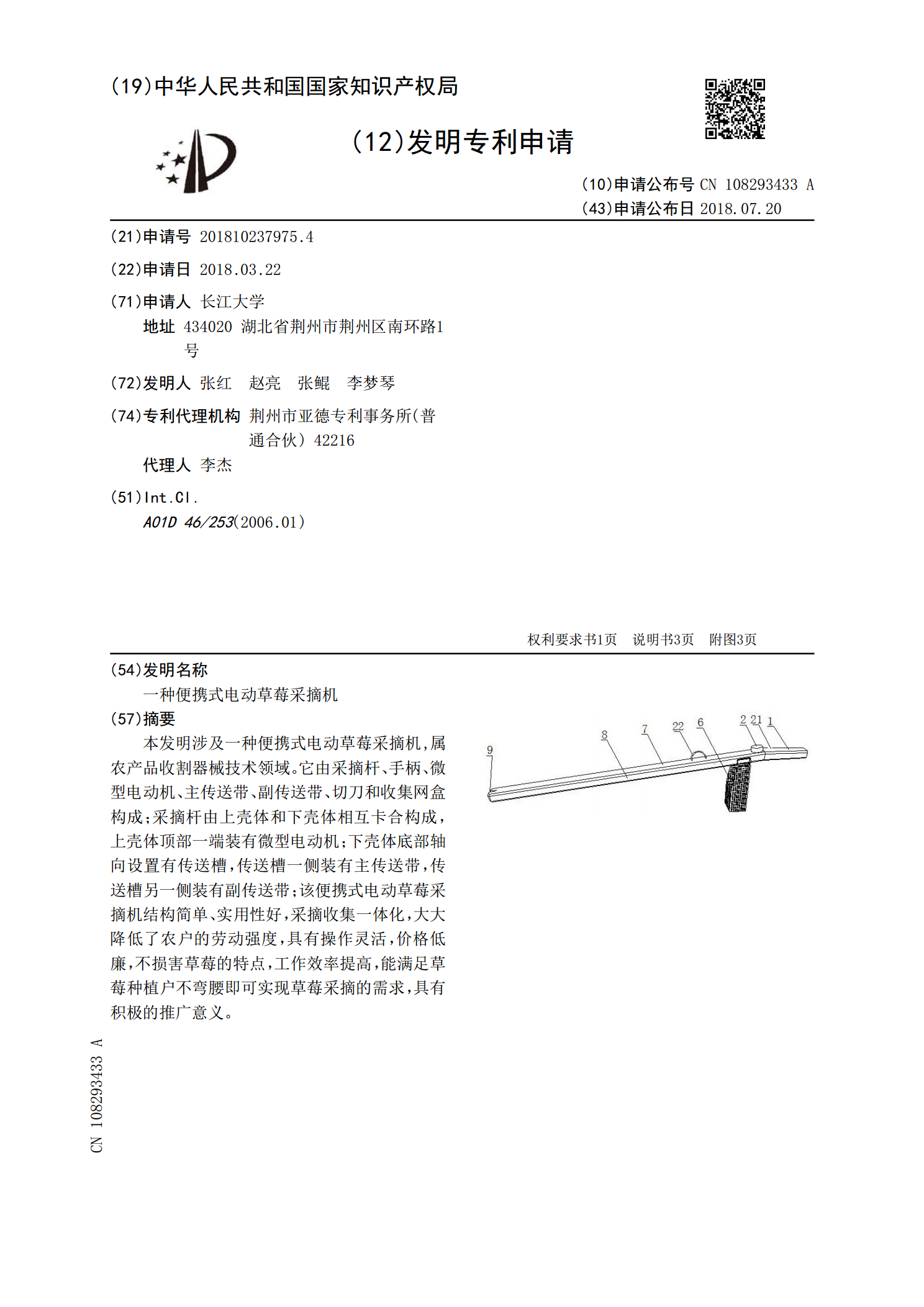
一种便携式电动草莓采摘机.pdf
本发明涉及一种便携式电动草莓采摘机,属农产品收割器械技术领域。它由采摘杆、手柄、微型电动机、主传送带、副传送带、切刀和收集网盒构成;采摘杆由上壳体和下壳体相互卡合构成,上壳体顶部一端装有微型电动机;下壳体底部轴向设置有传送槽,传送槽一侧装有主传送带,传送槽另一侧装有副传送带;该便携式电动草莓采摘机结构简单、实用性好,采摘收集一体化,大大降低了农户的劳动强度,具有操作灵活,价格低廉,不损害草莓的特点,工作效率提高,能满足草莓种植户不弯腰即可实现草莓采摘的需求,具有积极的推广意义。