
全自动垄作式草莓采摘机器人及使用方法.pdf

一吃****春艳


1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
全自动垄作式草莓采摘机器人及使用方法.pdf
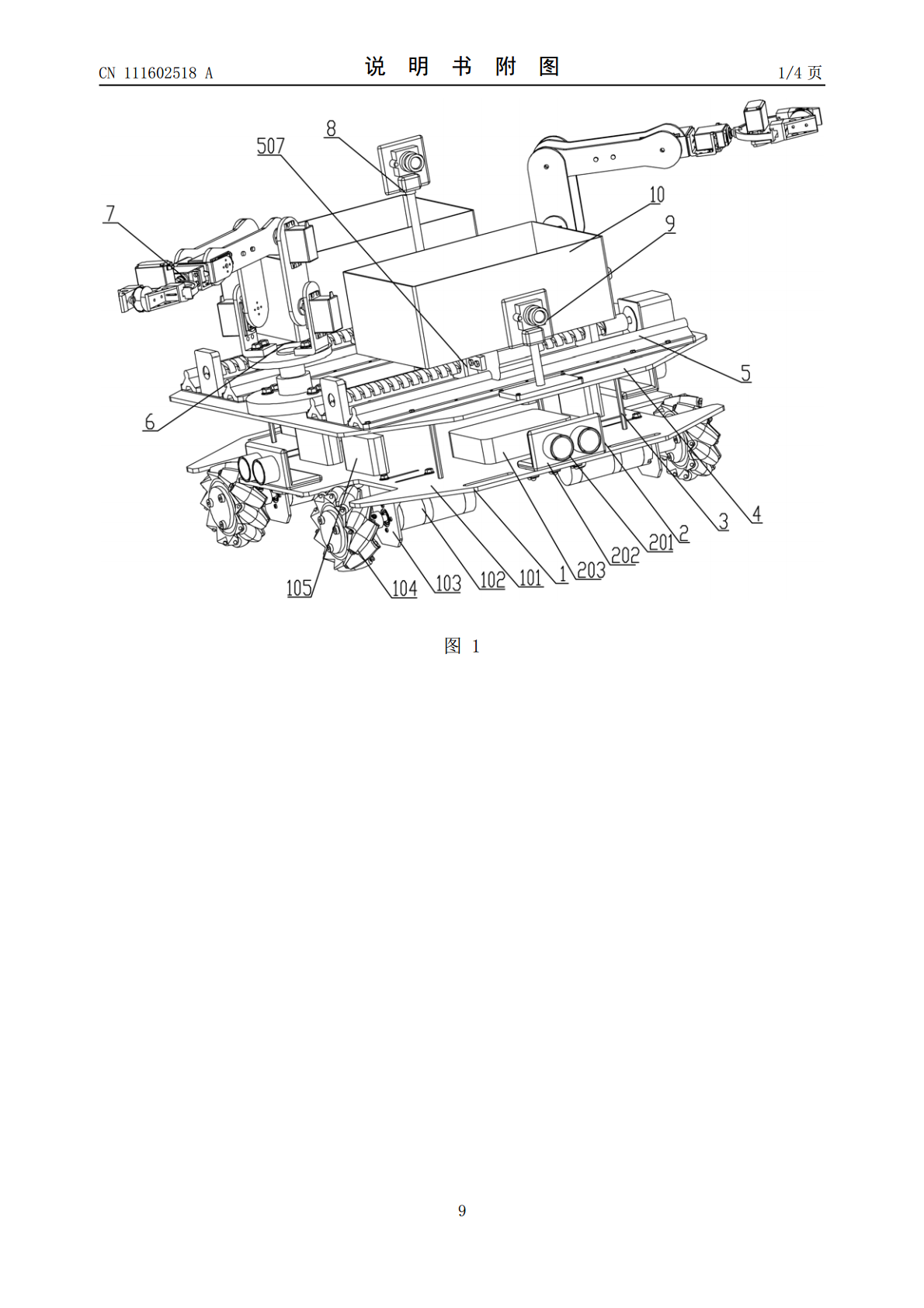
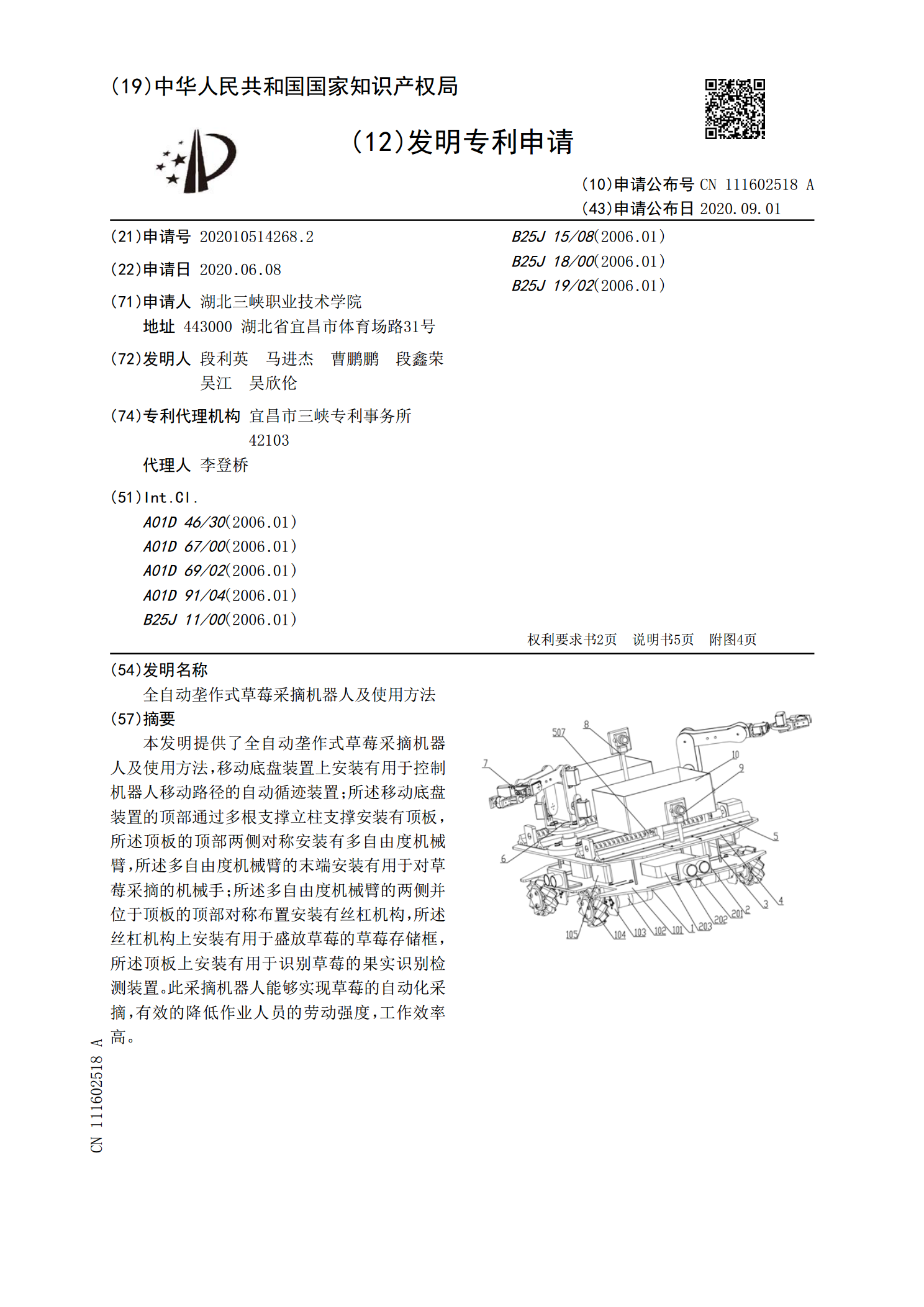
本发明提供了全自动垄作式草莓采摘机器人及使用方法,移动底盘装置上安装有用于控制机器人移动路径的自动循迹装置;所述移动底盘装置的顶部通过多根支撑立柱支撑安装有顶板,所述顶板的顶部两侧对称安装有多自由度机械臂,所述多自由度机械臂的末端安装有用于对草莓采摘的机械手;所述多自由度机械臂的两侧并位于顶板的顶部对称布置安装有丝杠机构,所述丝杠机构上安装有用于盛放草莓的草莓存储框,所述顶板上安装有用于识别草莓的果实识别检测装置。此采摘机器人能够实现草莓的自动化采摘,有效的降低作业人员的劳动强度,工作效率高。
一种垄作草莓采摘机器人.pdf
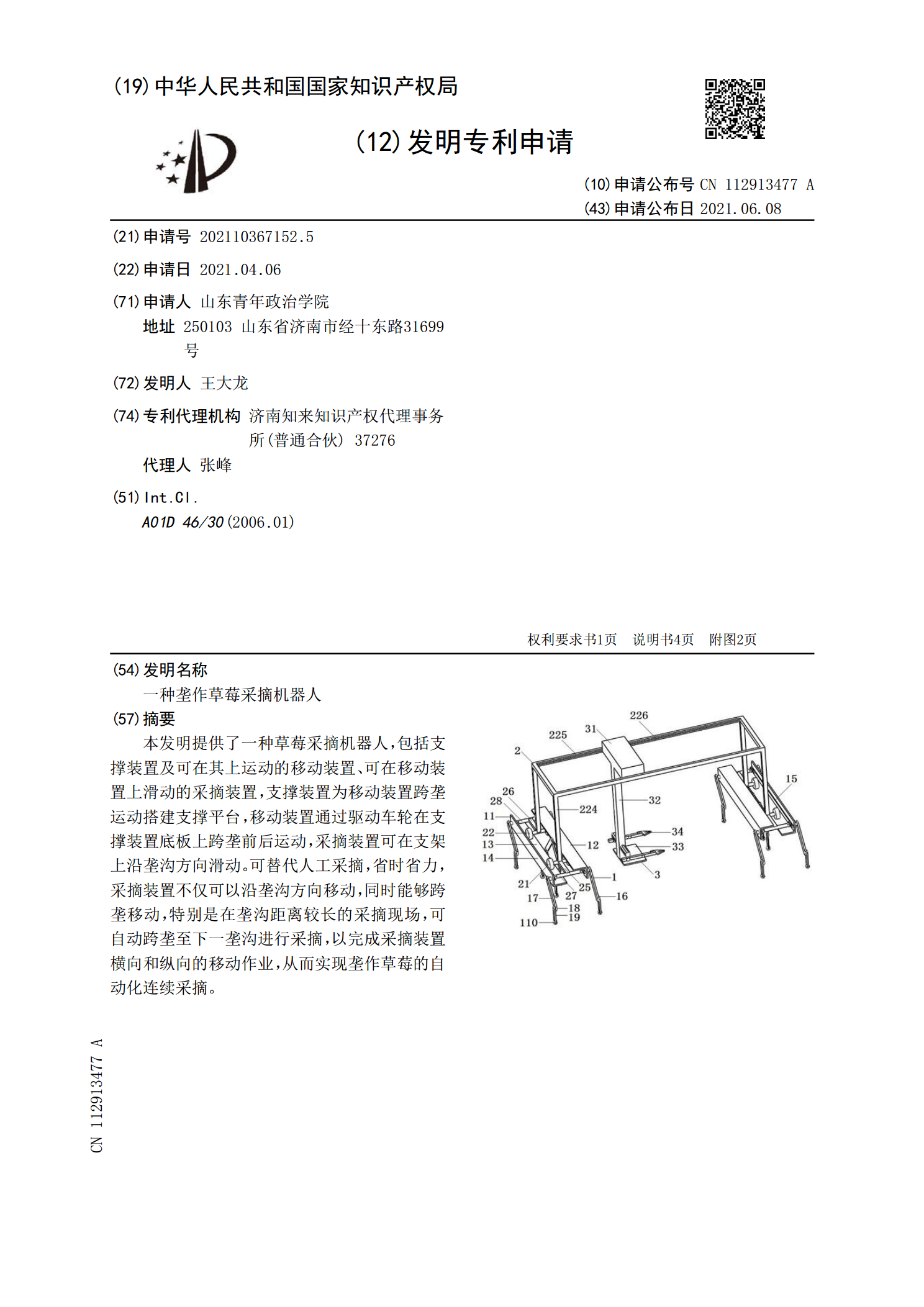
本发明提供了一种草莓采摘机器人,包括支撑装置及可在其上运动的移动装置、可在移动装置上滑动的采摘装置,支撑装置为移动装置跨垄运动搭建支撑平台,移动装置通过驱动车轮在支撑装置底板上跨垄前后运动,采摘装置可在支架上沿垄沟方向滑动。可替代人工采摘,省时省力,采摘装置不仅可以沿垄沟方向移动,同时能够跨垄移动,特别是在垄沟距离较长的采摘现场,可自动跨垄至下一垄沟进行采摘,以完成采摘装置横向和纵向的移动作业,从而实现垄作草莓的自动化连续采摘。

一种垄作式草莓全自动采收车.pdf
本发明涉及一种农业智能装备。技术方案是:一种垄作式草莓全自动采收车,其特征在于:包括机架、安装在机架前侧的双目相机、设置在机架底部的行走底盘装置、可活动地定位在机架顶部以采摘草莓的草莓采摘装置、对草莓进行接收和输送的草莓输送装置、用于检测草莓输送时竖直高度位置参数的激光测距装置、对草莓进行去柄处理的果柄去除装置、存放有草莓框并可控制草莓框依次落下的自动落框装置、设置在自动落框装置下方以接收和输送草莓框的草莓框输送装置、将去除果柄的草莓摆放至草莓框中的自动摆放装置、对草莓框进行收集的草莓框收集装置以及电控箱
全自动龙门式草莓采摘机及其采摘方法.pdf
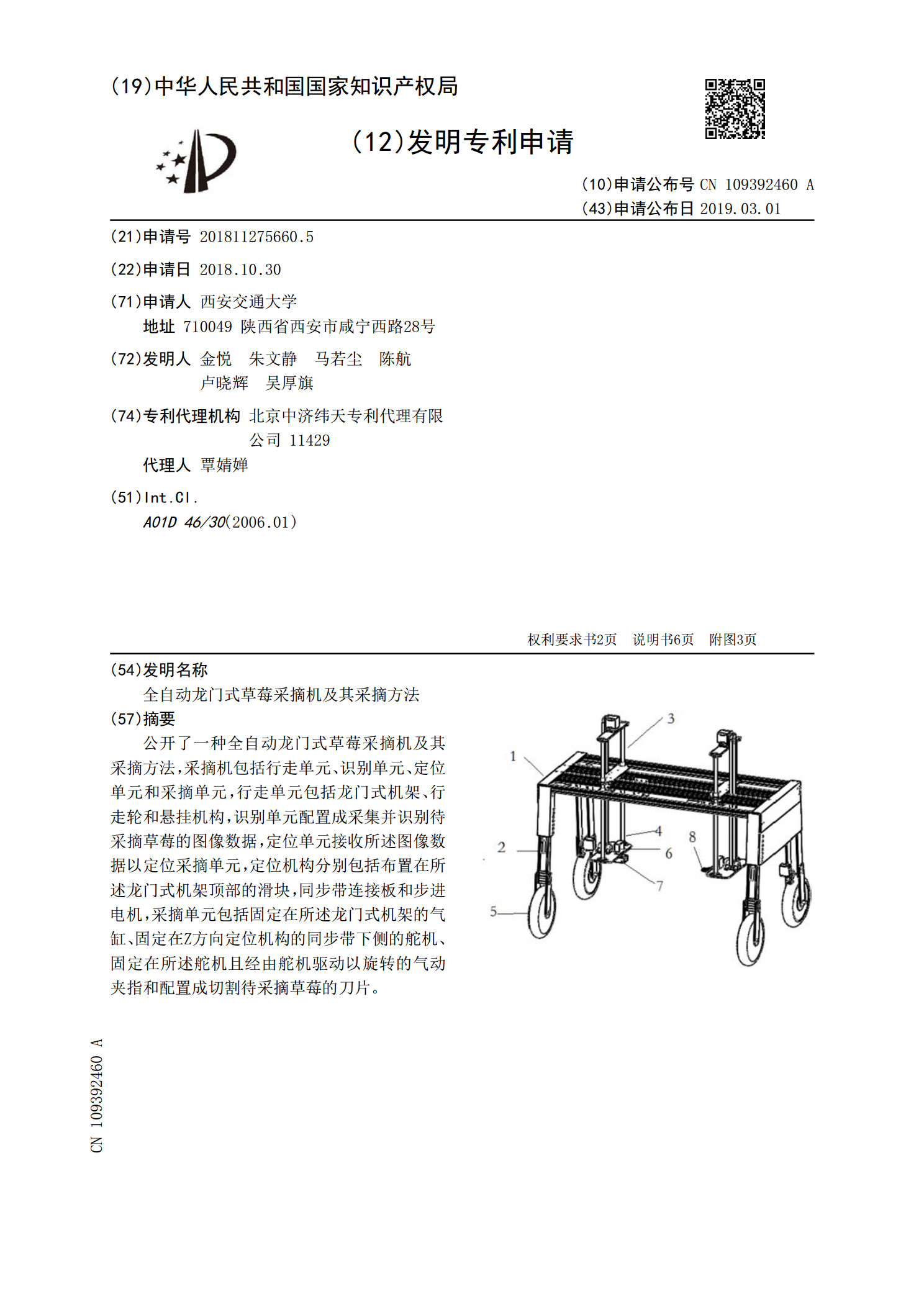
公开了一种全自动龙门式草莓采摘机及其采摘方法,采摘机包括行走单元、识别单元、定位单元和采摘单元,行走单元包括龙门式机架、行走轮和悬挂机构,识别单元配置成采集并识别待采摘草莓的图像数据,定位单元接收所述图像数据以定位采摘单元,定位机构分别包括布置在所述龙门式机架顶部的滑块,同步带连接板和步进电机,采摘单元包括固定在所述龙门式机架的气缸、固定在Z方向定位机构的同步带下侧的舵机、固定在所述舵机且经由舵机驱动以旋转的气动夹指和配置成切割待采摘草莓的刀片。
一种夹持翻转机构、应用及其构建的垄作式草莓采摘机器.pdf
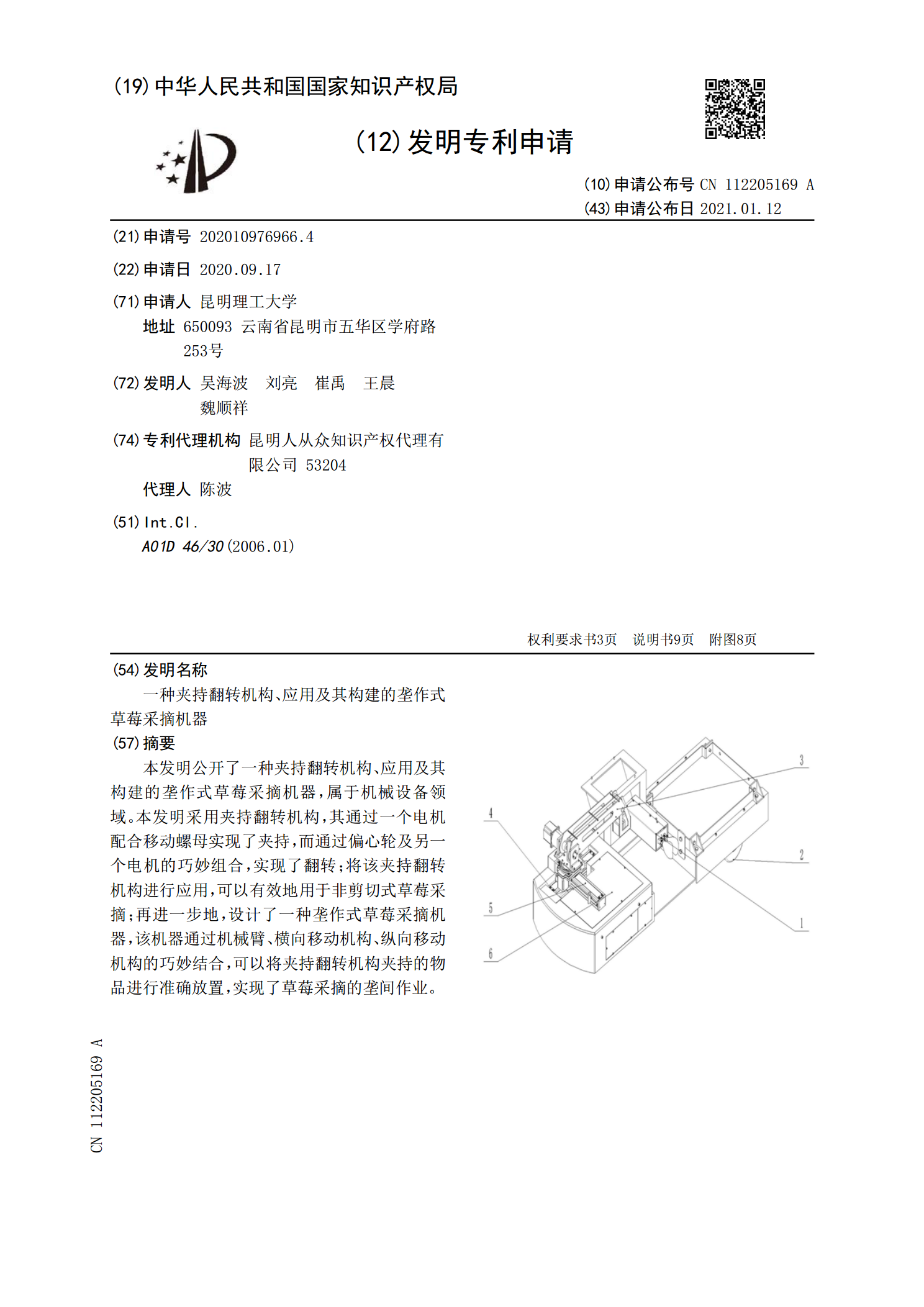
本发明公开了一种夹持翻转机构、应用及其构建的垄作式草莓采摘机器,属于机械设备领域。本发明采用夹持翻转机构,其通过一个电机配合移动螺母实现了夹持,而通过偏心轮及另一个电机的巧妙组合,实现了翻转;将该夹持翻转机构进行应用,可以有效地用于非剪切式草莓采摘;再进一步地,设计了一种垄作式草莓采摘机器,该机器通过机械臂、横向移动机构、纵向移动机构的巧妙结合,可以将夹持翻转机构夹持的物品进行准确放置,实现了草莓采摘的垄间作业。