
一种无线巡检机器人系统以及控制方法.pdf

猫巷****盟主


1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种无线巡检机器人系统以及控制方法.pdf
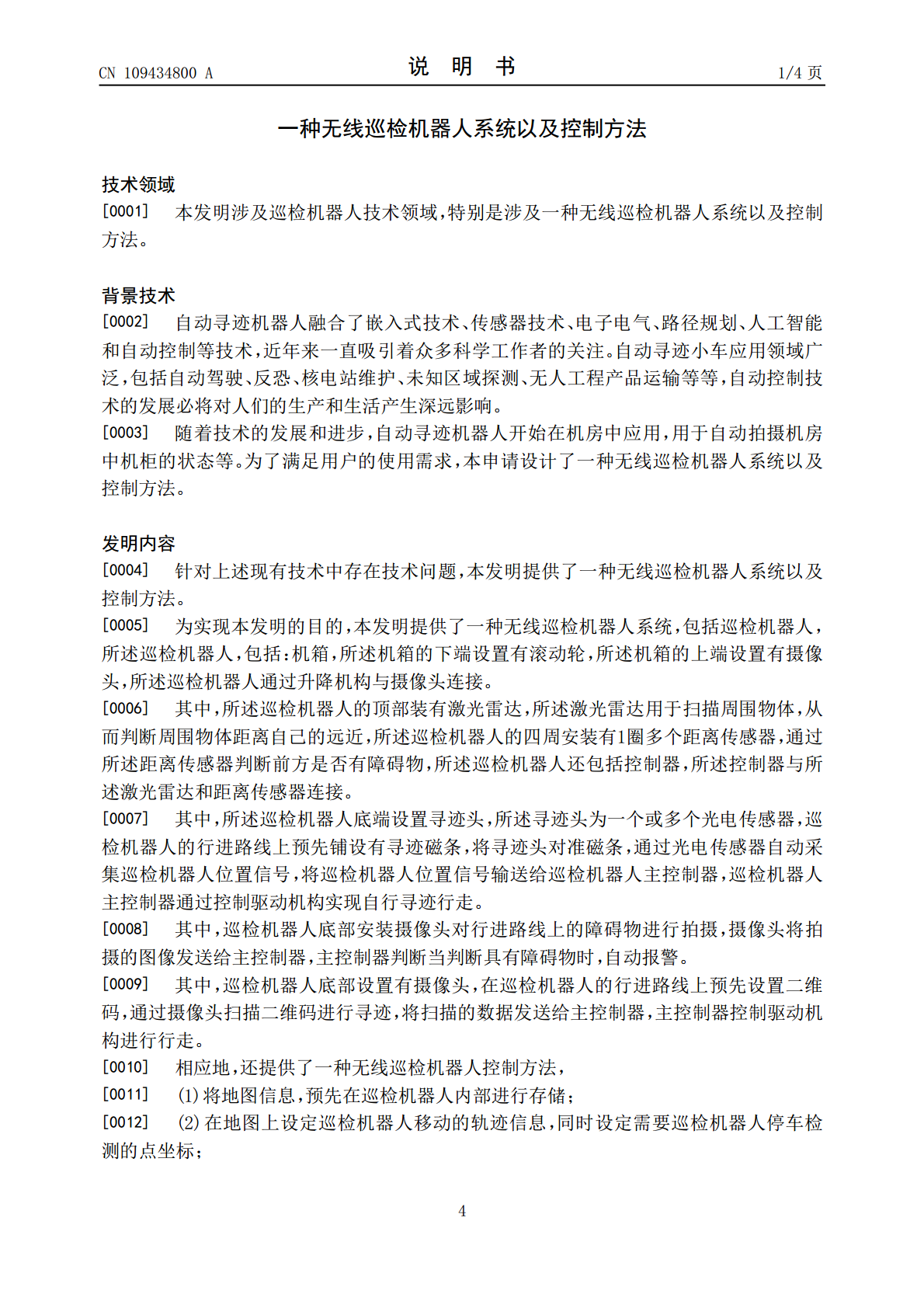
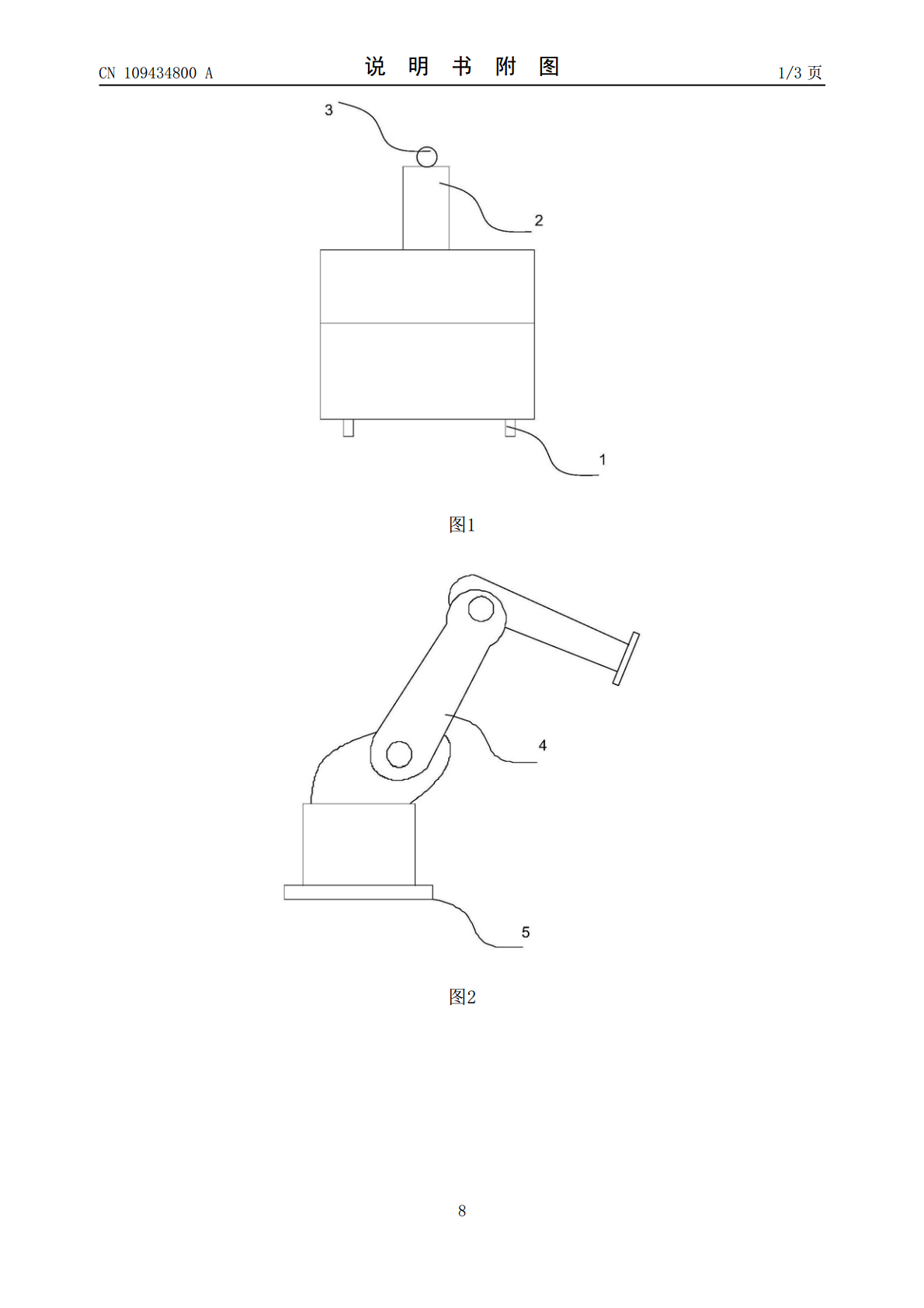
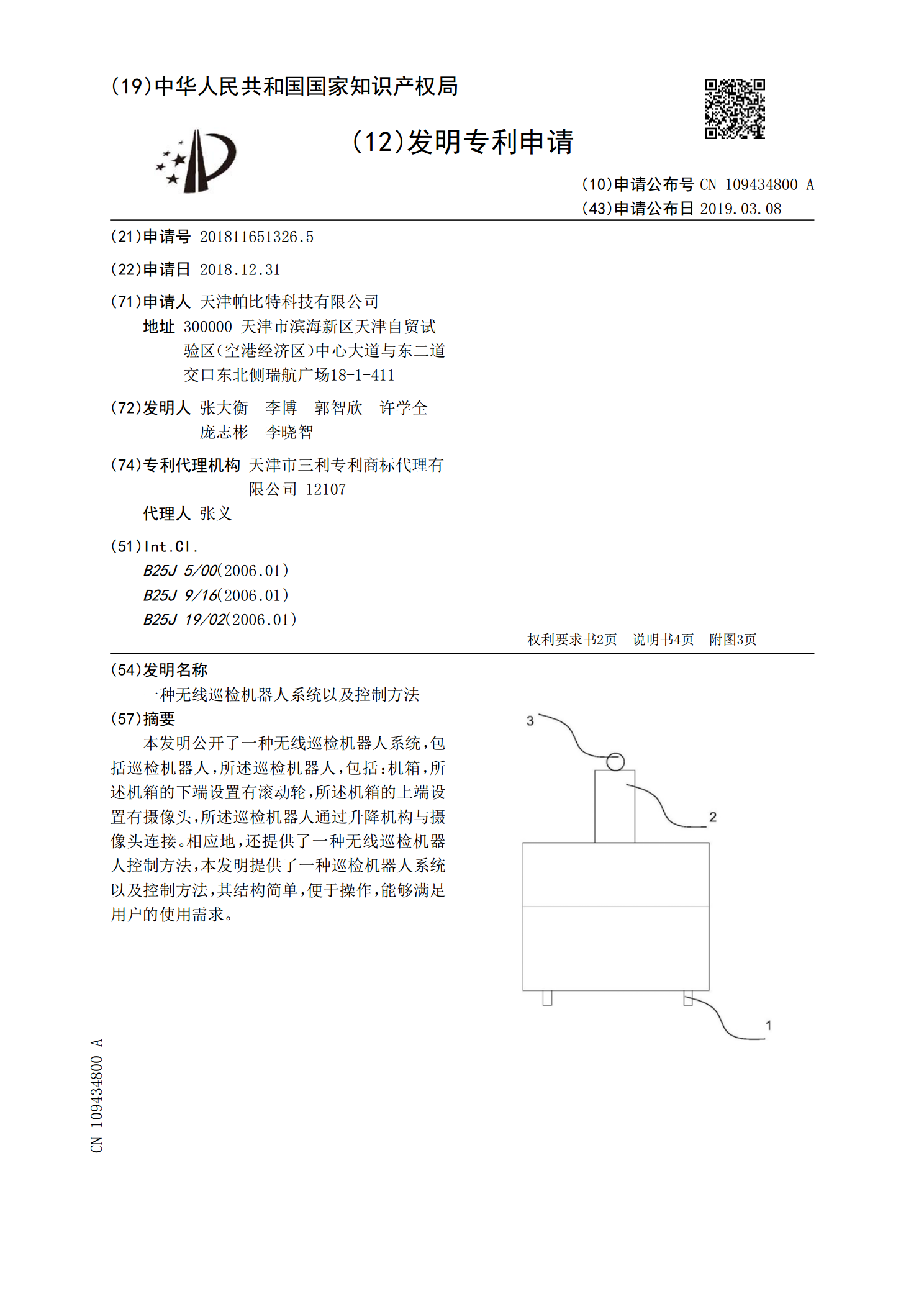
本发明公开了一种无线巡检机器人系统,包括巡检机器人,所述巡检机器人,包括:机箱,所述机箱的下端设置有滚动轮,所述机箱的上端设置有摄像头,所述巡检机器人通过升降机构与摄像头连接。相应地,还提供了一种无线巡检机器人控制方法,本发明提供了一种巡检机器人系统以及控制方法,其结构简单,便于操作,能够满足用户的使用需求。
一种巡检机器人无线充电系统及方法.pdf
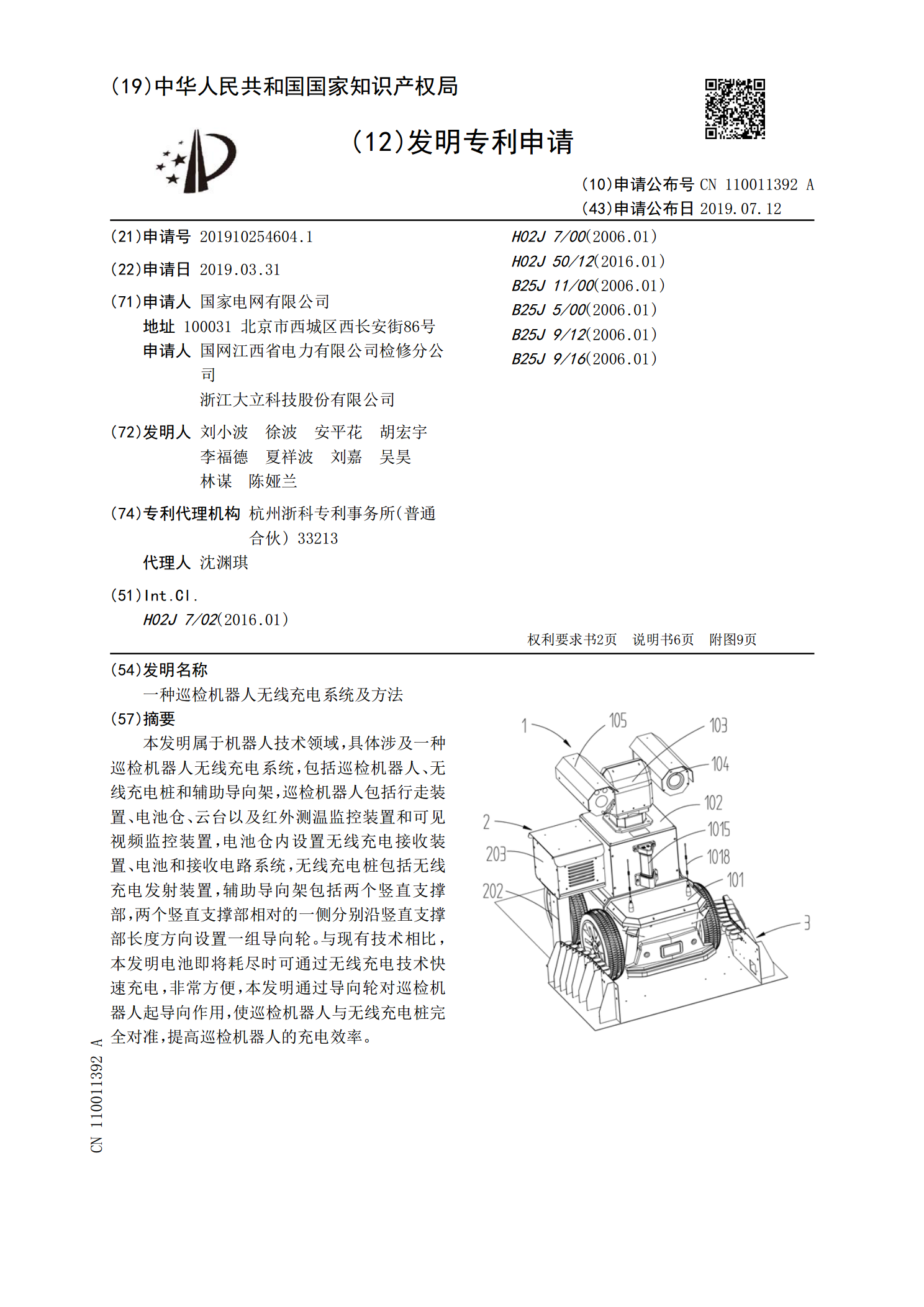
本发明属于机器人技术领域,具体涉及一种巡检机器人无线充电系统,包括巡检机器人、无线充电桩和辅助导向架,巡检机器人包括行走装置、电池仓、云台以及红外测温监控装置和可见视频监控装置,电池仓内设置无线充电接收装置、电池和接收电路系统,无线充电桩包括无线充电发射装置,辅助导向架包括两个竖直支撑部,两个竖直支撑部相对的一侧分别沿竖直支撑部长度方向设置一组导向轮。与现有技术相比,本发明电池即将耗尽时可通过无线充电技术快速充电,非常方便,本发明通过导向轮对巡检机器人起导向作用,使巡检机器人与无线充电桩完全对准,提高巡检
一种高速公路智能巡检机器人系统以及巡检方法.pdf
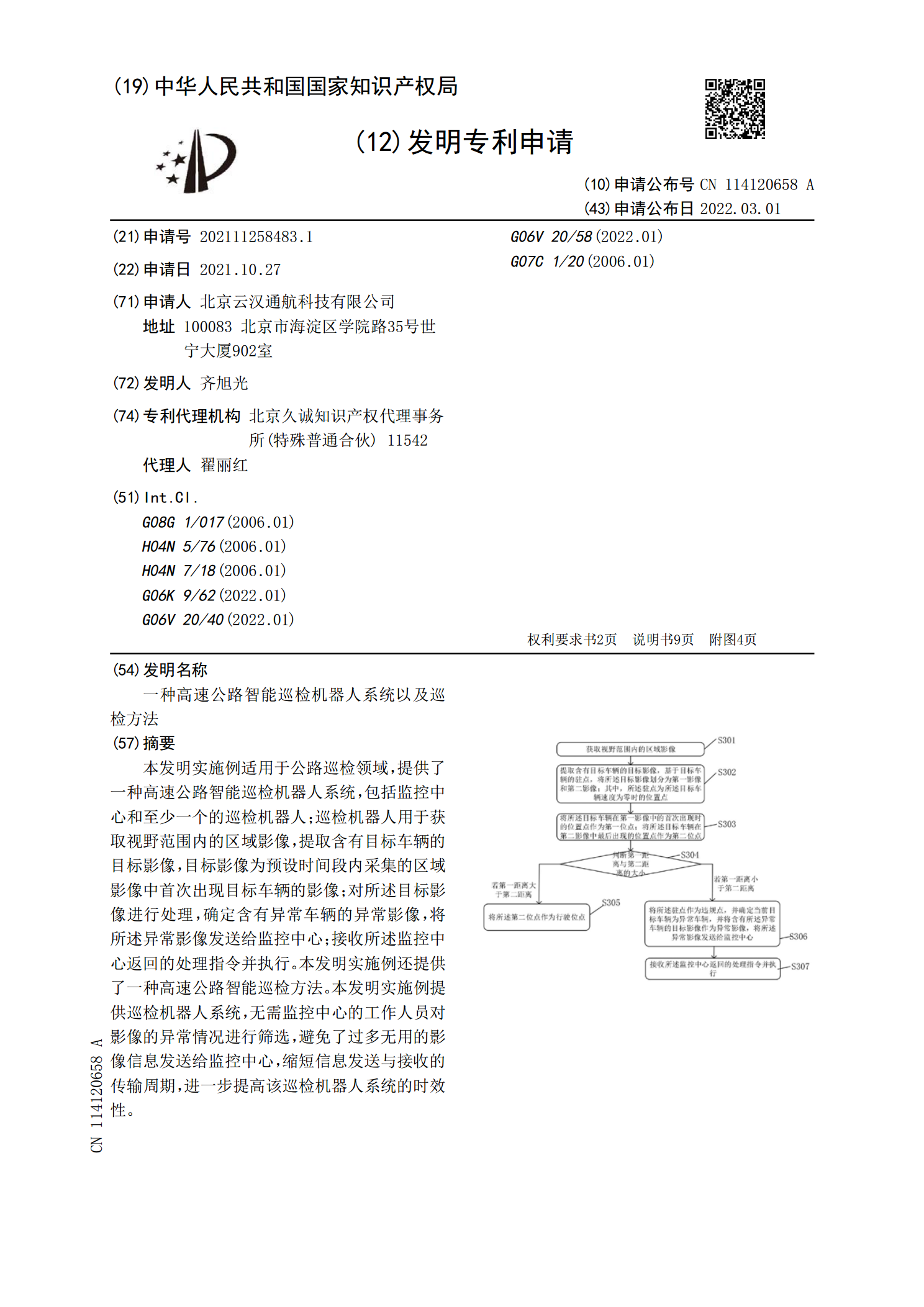
本发明实施例适用于公路巡检领域,提供了一种高速公路智能巡检机器人系统,包括监控中心和至少一个的巡检机器人;巡检机器人用于获取视野范围内的区域影像,提取含有目标车辆的目标影像,目标影像为预设时间段内采集的区域影像中首次出现目标车辆的影像;对所述目标影像进行处理,确定含有异常车辆的异常影像,将所述异常影像发送给监控中心;接收所述监控中心返回的处理指令并执行。本发明实施例还提供了一种高速公路智能巡检方法。本发明实施例提供巡检机器人系统,无需监控中心的工作人员对影像的异常情况进行筛选,避免了过多无用的影像信息发送
无人机巡检的控制方法、控制装置以及巡检系统.pdf
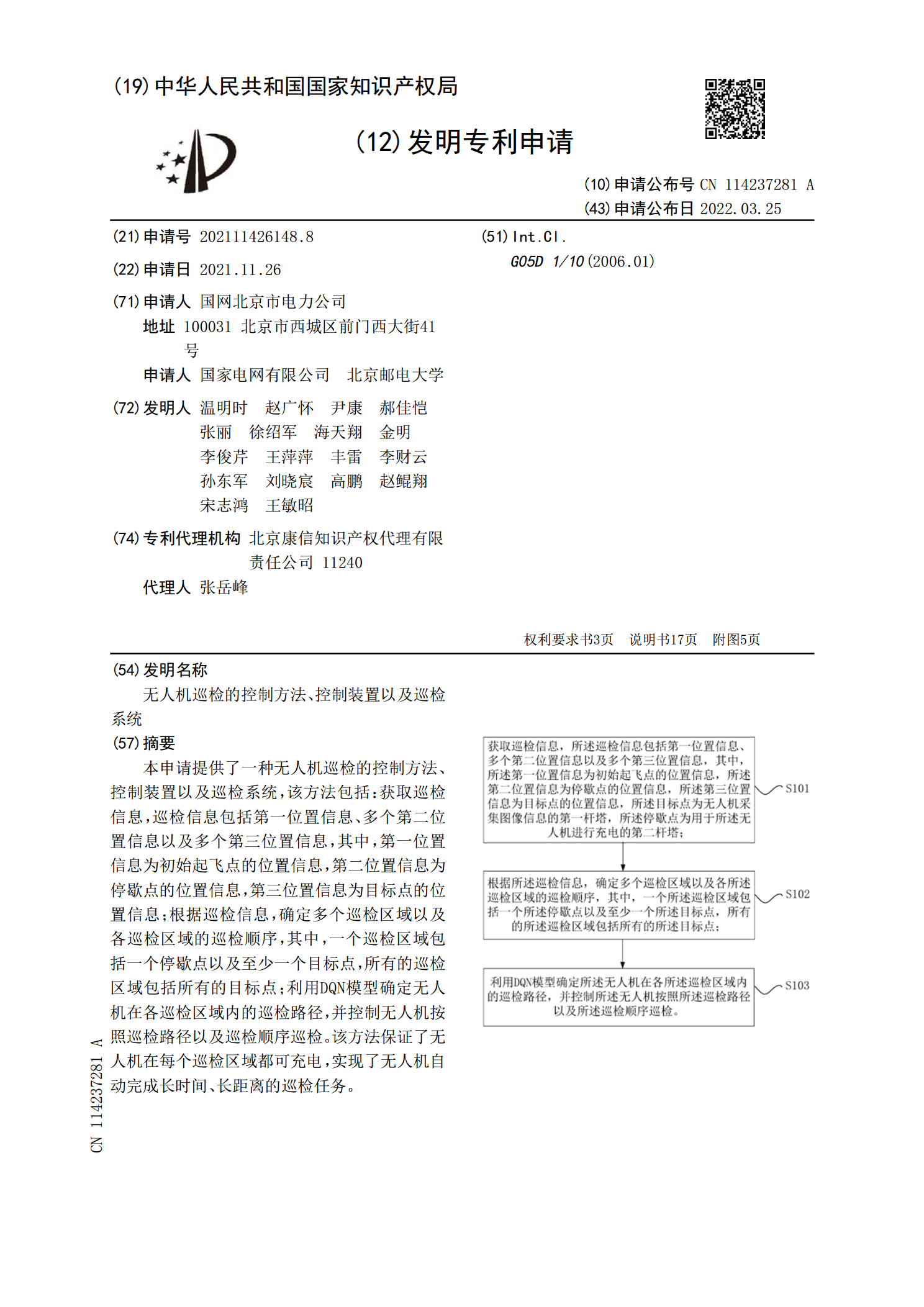
本申请提供了一种无人机巡检的控制方法、控制装置以及巡检系统,该方法包括:获取巡检信息,巡检信息包括第一位置信息、多个第二位置信息以及多个第三位置信息,其中,第一位置信息为初始起飞点的位置信息,第二位置信息为停歇点的位置信息,第三位置信息为目标点的位置信息;根据巡检信息,确定多个巡检区域以及各巡检区域的巡检顺序,其中,一个巡检区域包括一个停歇点以及至少一个目标点,所有的巡检区域包括所有的目标点;利用DQN模型确定无人机在各巡检区域内的巡检路径,并控制无人机按照巡检路径以及巡检顺序巡检。该方法保证了无人机在每

一种管廊巡检机器人巡检系统及方法.pdf
本发明提供一种管廊巡检机器人巡检系统及方法,所述综合管廊巡检机器人巡检系统包括:机器人本体、展示层、数据层、应用层、感知层;解决了由于管廊长度长,在采集图像时需要实时调整自己的监控角度,同时保证巡检快速,全面,准确。