
无人机巡检的控制方法、控制装置以及巡检系统.pdf

努力****妙风


1/10
2/10
3/10
4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无人机巡检的控制方法、控制装置以及巡检系统.pdf
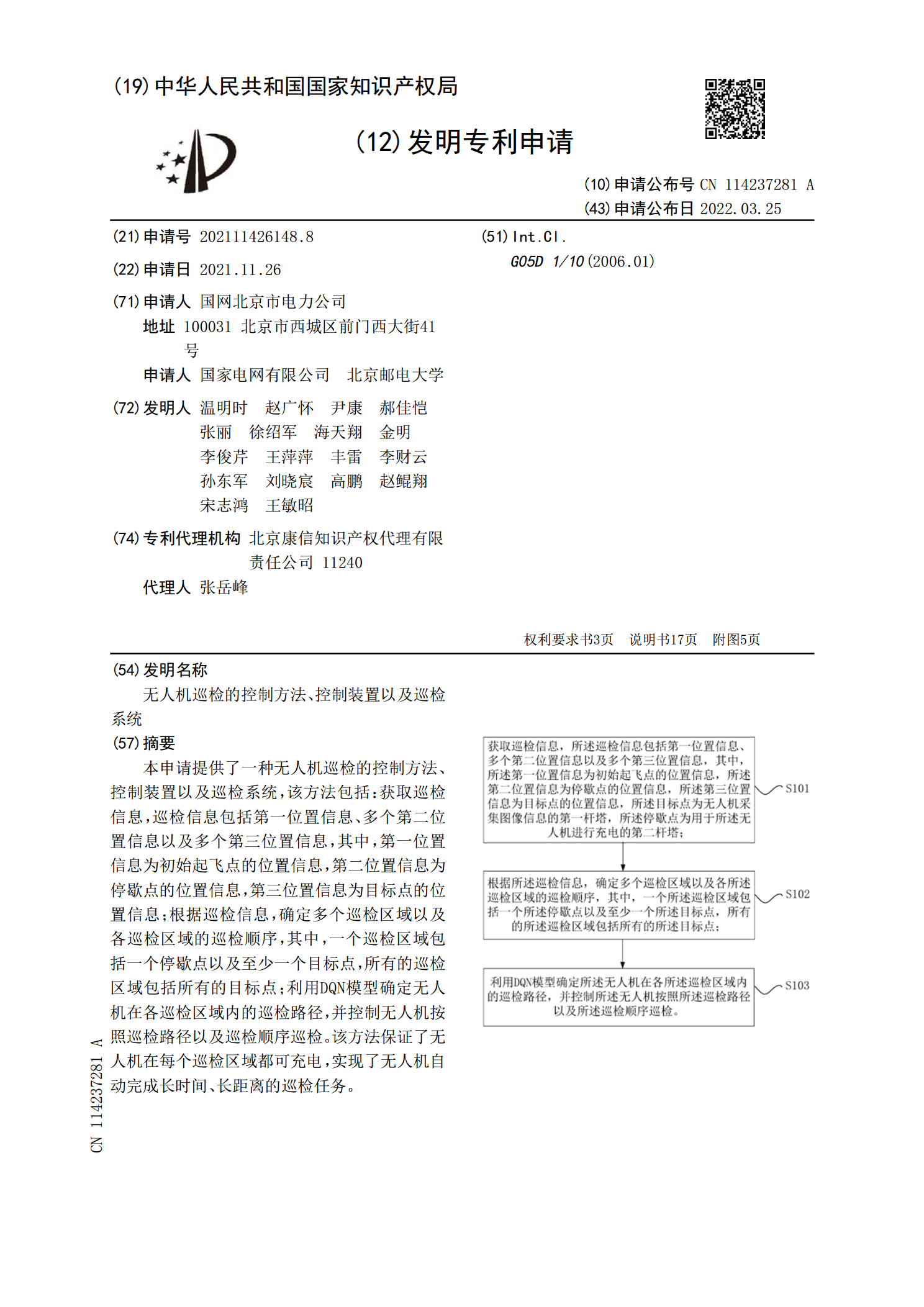
本申请提供了一种无人机巡检的控制方法、控制装置以及巡检系统,该方法包括:获取巡检信息,巡检信息包括第一位置信息、多个第二位置信息以及多个第三位置信息,其中,第一位置信息为初始起飞点的位置信息,第二位置信息为停歇点的位置信息,第三位置信息为目标点的位置信息;根据巡检信息,确定多个巡检区域以及各巡检区域的巡检顺序,其中,一个巡检区域包括一个停歇点以及至少一个目标点,所有的巡检区域包括所有的目标点;利用DQN模型确定无人机在各巡检区域内的巡检路径,并控制无人机按照巡检路径以及巡检顺序巡检。该方法保证了无人机在每
基于无人机的水库巡检方法、装置、设备以及存储介质.pdf
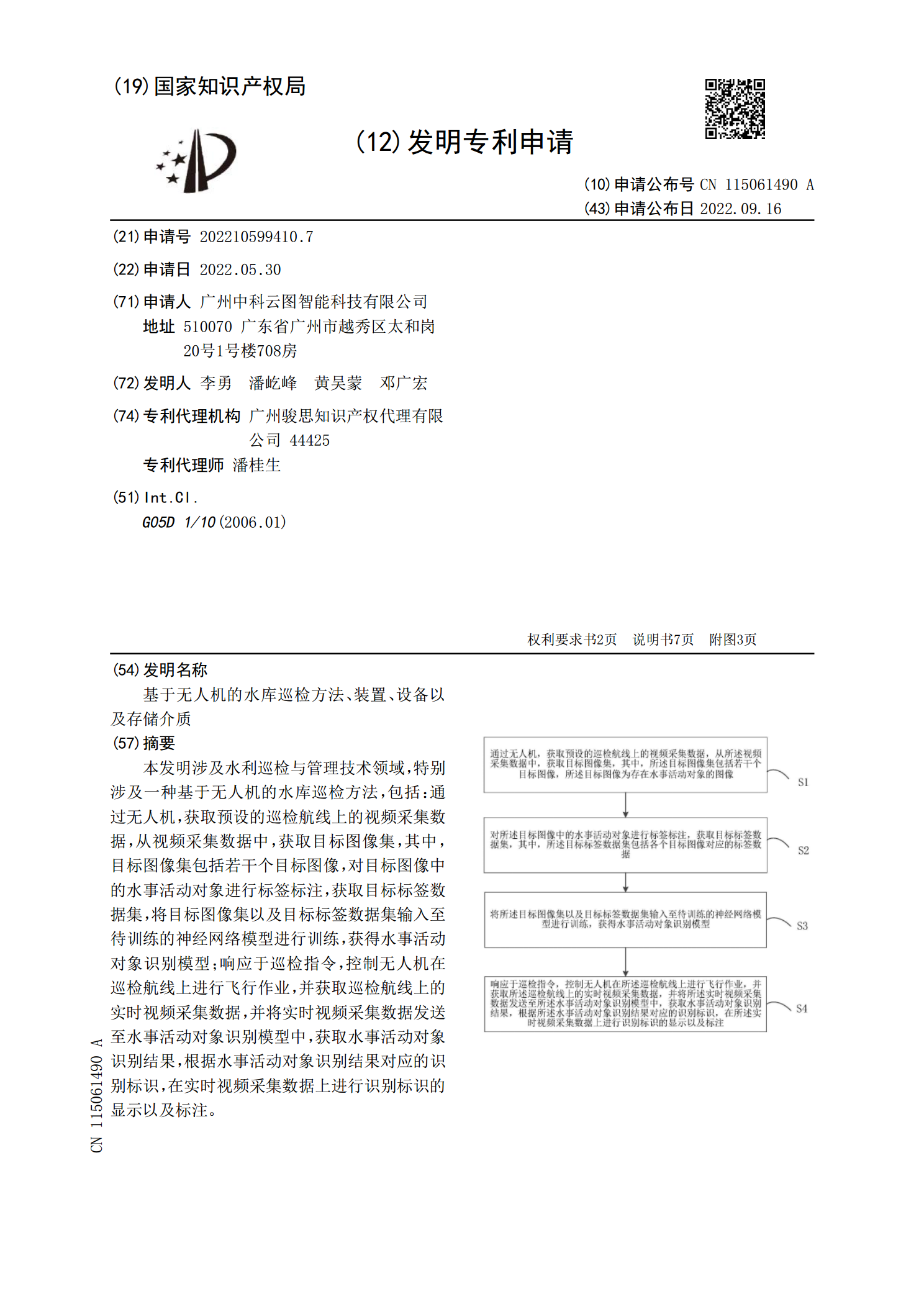
本发明涉及水利巡检与管理技术领域,特别涉及一种基于无人机的水库巡检方法,包括:通过无人机,获取预设的巡检航线上的视频采集数据,从视频采集数据中,获取目标图像集,其中,目标图像集包括若干个目标图像,对目标图像中的水事活动对象进行标签标注,获取目标标签数据集,将目标图像集以及目标标签数据集输入至待训练的神经网络模型进行训练,获得水事活动对象识别模型;响应于巡检指令,控制无人机在巡检航线上进行飞行作业,并获取巡检航线上的实时视频采集数据,并将实时视频采集数据发送至水事活动对象识别模型中,获取水事活动对象识别结果

巡检机器人、巡检机器人上线控制方法及装置.pdf
本发明涉及一种巡检机器人、巡检机器人上线控制方法及装置,其中,巡检机器人,包括处理机构、飞行机构、辅助上线机构以及滚轮机构;辅助上线机构包括辅助支架和挂钩;处理机构包括壳体以及装设在壳体内的处理器;处理器在获取到辅助支架至输电线的距离值时,向飞行机构传输空中停机指令;飞行机构根据空中停机指令在空中停机;处理器在距离值小于或等于距离阈值时,向飞行机构传输挂钩上线指令;飞行机构根据挂钩上线指令进行挂钩上线飞行;处理器确认挂钩挂在输电线时,向飞行机构传输滚轮上线指令;飞行机构根据滚轮上线指令进行滚轮上线飞行。本
一种无线巡检机器人系统以及控制方法.pdf
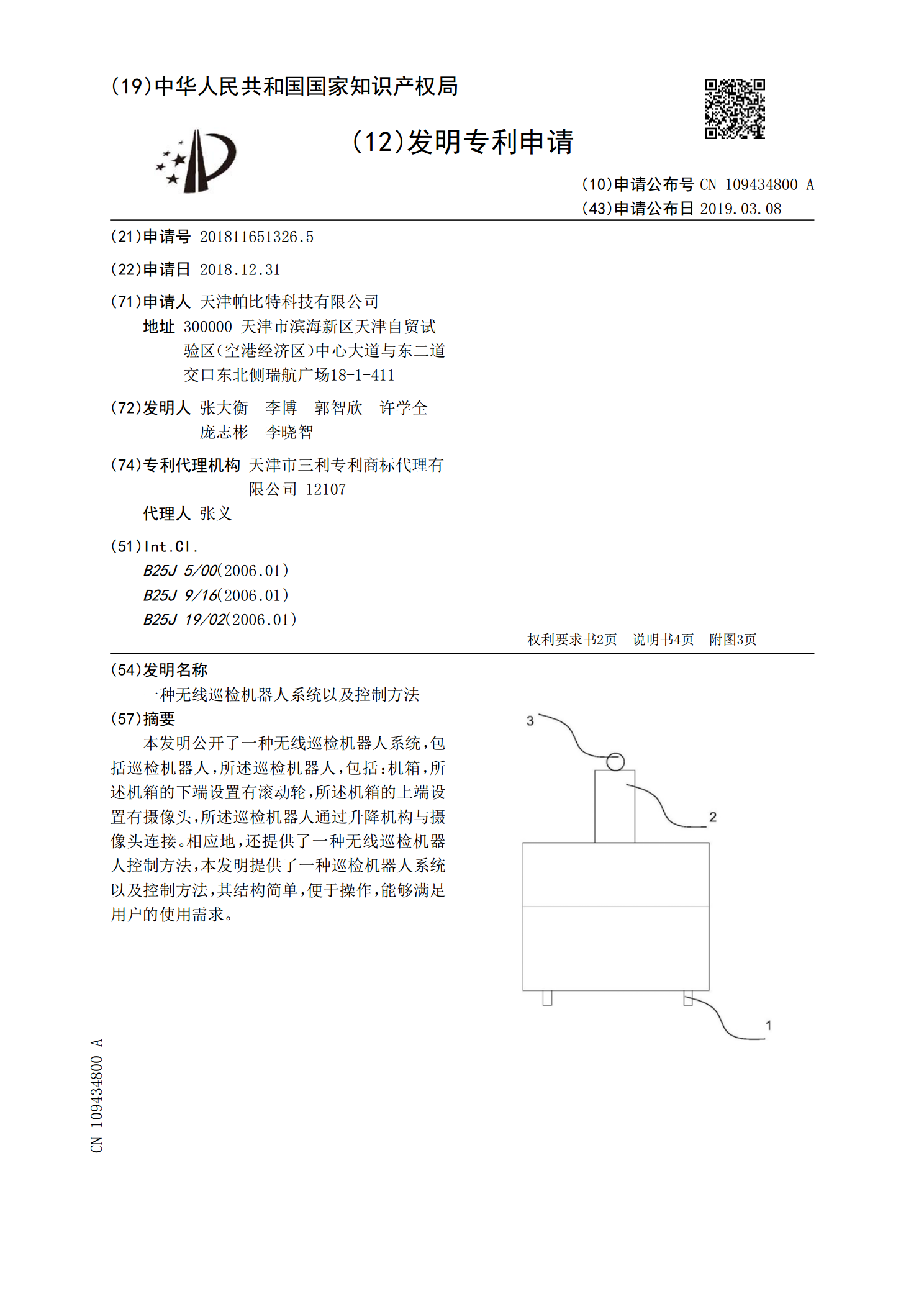
本发明公开了一种无线巡检机器人系统,包括巡检机器人,所述巡检机器人,包括:机箱,所述机箱的下端设置有滚动轮,所述机箱的上端设置有摄像头,所述巡检机器人通过升降机构与摄像头连接。相应地,还提供了一种无线巡检机器人控制方法,本发明提供了一种巡检机器人系统以及控制方法,其结构简单,便于操作,能够满足用户的使用需求。

一种城市管网无人机巡检方法及巡检系统.pdf
本发明涉及一种城市管网无人机巡检方法及巡检系统,所述巡检方法包括以下步骤:1)获取巡检区域面积和无人机飞行参数;2)基于所述无人机飞行参数获得无人机定点拍摄参数,根据所述无人机定点拍摄参数将巡检区域面积等分,获得若干巡检区域等分面;3)判断各等分面上各点位拍摄的图像是否包含巡检区域,若是,则保留该点位,若否,则放弃该点位;4)将保留的所有点位相连,构建获得无人机巡检路线;5)基于所述无人机巡检路线完成城市管网巡检,且巡检过程中自动避障。与现有技术相比,本发明具有路线规划效率高、可靠性高、巡检效率高等优点。