
一种用于多轴式工业机器人视觉采集固定机构.pdf

文阁****23


1/8
2/8

3/8

4/8
5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于多轴式工业机器人视觉采集固定机构.pdf
本发明公开了一种用于多轴式工业机器人视觉采集固定机构,属于工业机器人技术领域,解决了在工业机器人进行视觉采集时,视觉采集装置容易受到外界环境的影响,进而导致采集效果不理想的问题;其技术特征是:包括挂件、壳体、升降座和视觉采集装置,所述壳体左侧壁对称焊接两个挂件,所述挂件上安装销孔,所述壳体内腔顶部固定焊接工作电机,所述工作电机左侧输出端固定焊接第一齿轮,所述第一齿轮下方设置转轴,所述转轴下方设置升降座,所述升降座下表面中间位置固定焊接连接杆,连接杆下端固定焊接视觉采集装置;本发明能够实现对采集装置进行充分

一种多轴工业机器人固定底座及组件.pdf
本发明公开了一种多轴工业机器人固定底座及组件,包括座板组合、滚包轮组和操作组件。本发明中,设置座板组合,座板组合包括矩形承载板和位于矩形承载板上部的托板,托板底部设置四个支腿板,支腿板和矩形承载板上下滑动配合,在支腿板和矩形承载板之间设置滚包轮组,滚包轮组包括内轮和滚圈,滚圈套设在内轮的外周边且为转动配合,内轮内设置弯通槽,弯通槽的一端位于内圈的轴线位置,矩形承载板下部设置的支撑板和内轮一侧的中心位置转动连接,而支腿板的一侧和弯通槽内侧壁滚动配合,由此通过转动内轮可以带动支腿板稳定提升,此种内轮旋转利用内
一种应用于工业机器人的固定机构.pdf
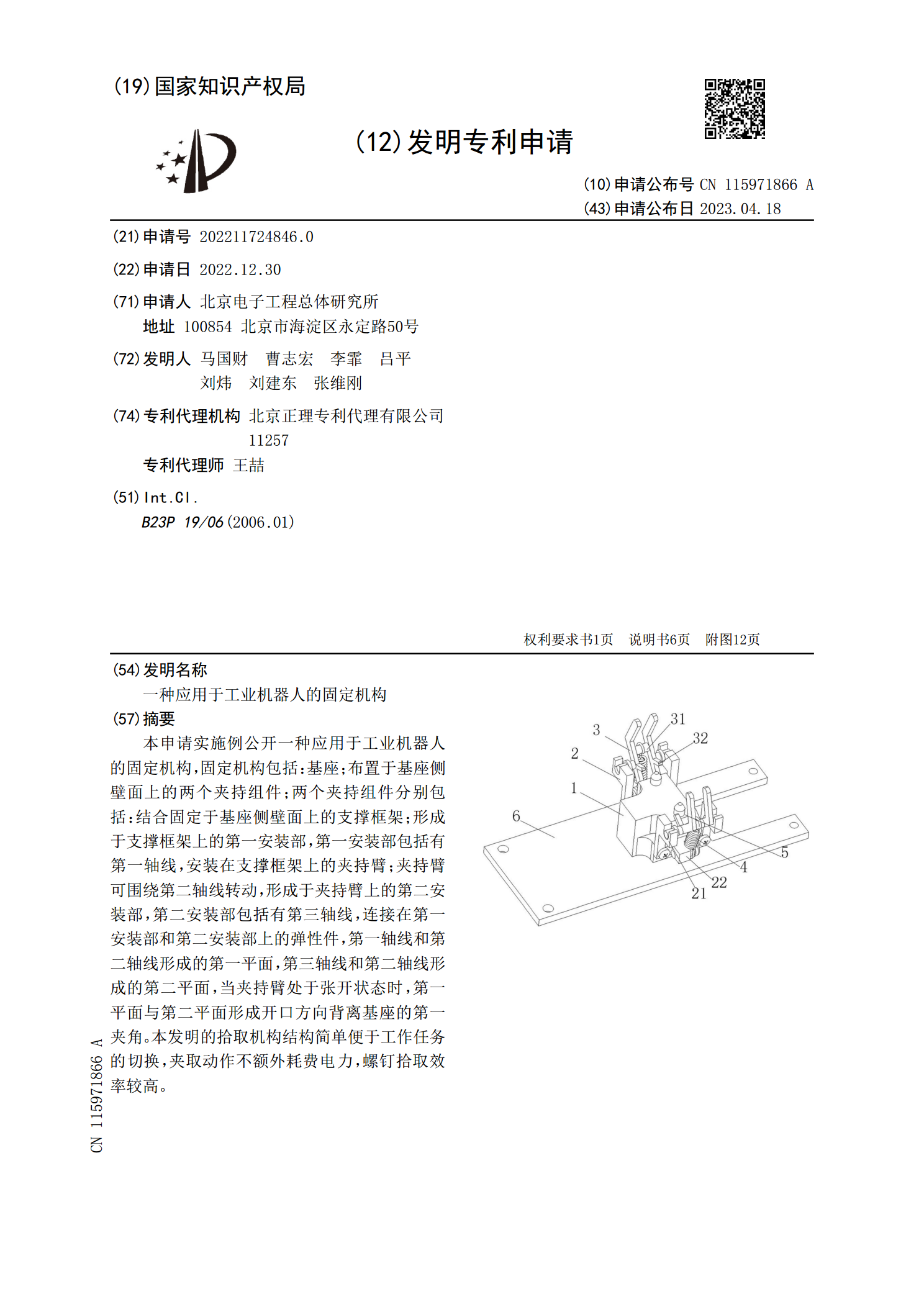
本申请实施例公开一种应用于工业机器人的固定机构,固定机构包括:基座;布置于基座侧壁面上的两个夹持组件;两个夹持组件分别包括:结合固定于基座侧壁面上的支撑框架;形成于支撑框架上的第一安装部,第一安装部包括有第一轴线,安装在支撑框架上的夹持臂;夹持臂可围绕第二轴线转动,形成于夹持臂上的第二安装部,第二安装部包括有第三轴线,连接在第一安装部和第二安装部上的弹性件,第一轴线和第二轴线形成的第一平面,第三轴线和第二轴线形成的第二平面,当夹持臂处于张开状态时,第一平面与第二平面形成开口方向背离基座的第一夹角。本发明的

一种工业机器人焊接固定机构.pdf
本发明公开了一种工业机器人焊接固定机构,属于焊接固定技术领域。一种工业机器人焊接固定机构,包括安装板,还包括:第一转动杆、第二转动杆,均转动连接在所述安装板的上端边缘,并且相互垂直;第一板件、第二板件,均滑动连接在所述安装板上端,并且分别与所述第一转动杆、第二转动杆相贴;螺纹杆,转动连接在所述安装板的上端;推块,转动连接在所述螺纹杆靠近第一板件一端,并且与安装板滑动连接;对称的顶杆,转动连接在推块的两侧,并且分别第一板件、第二板件相贴;本发明中通过第一转动杆、第二转动杆、推块、顶杆便于对板件进行夹紧固定,
一种用于工业外观检测的视觉识别机构.pdf
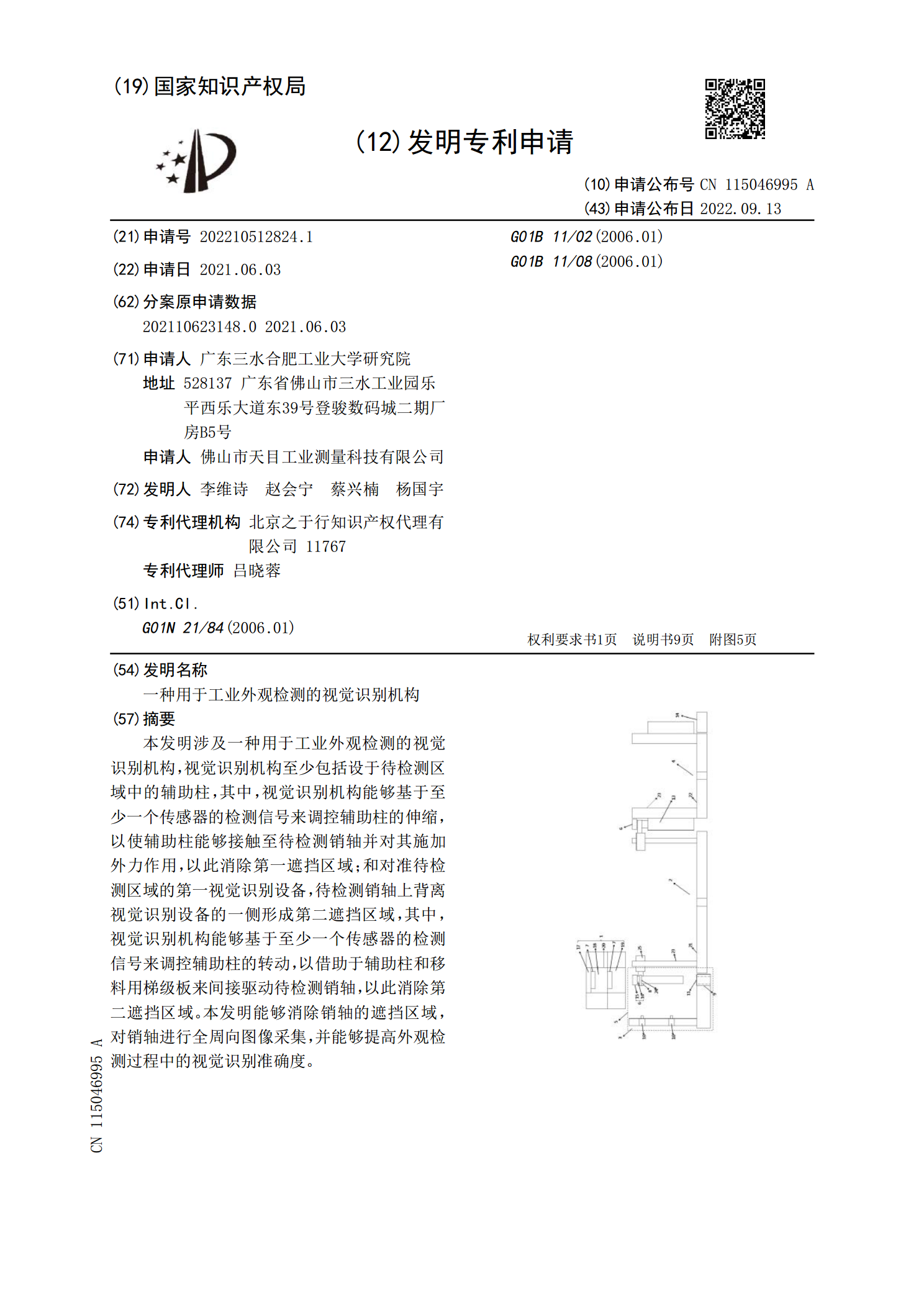
本发明涉及一种用于工业外观检测的视觉识别机构,视觉识别机构至少包括设于待检测区域中的辅助柱,其中,视觉识别机构能够基于至少一个传感器的检测信号来调控辅助柱的伸缩,以使辅助柱能够接触至待检测销轴并对其施加外力作用,以此消除第一遮挡区域;和对准待检测区域的第一视觉识别设备,待检测销轴上背离视觉识别设备的一侧形成第二遮挡区域,其中,视觉识别机构能够基于至少一个传感器的检测信号来调控辅助柱的转动,以借助于辅助柱和移料用梯级板来间接驱动待检测销轴,以此消除第二遮挡区域。本发明能够消除销轴的遮挡区域,对销轴进行全周向