
一种多轴工业机器人固定底座及组件.pdf

猫巷****志敏

1/10
2/10

3/10
4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种多轴工业机器人固定底座及组件.pdf
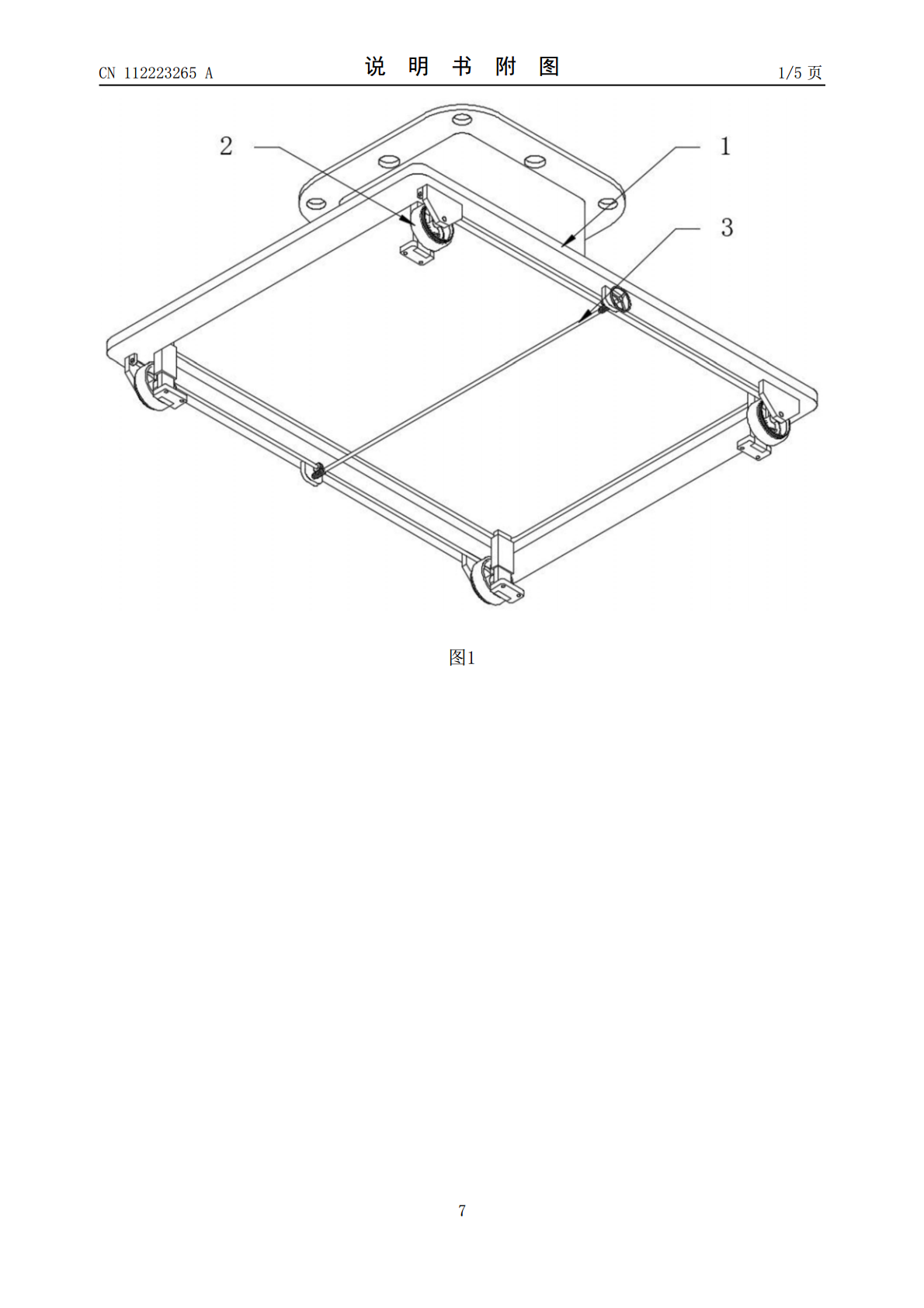
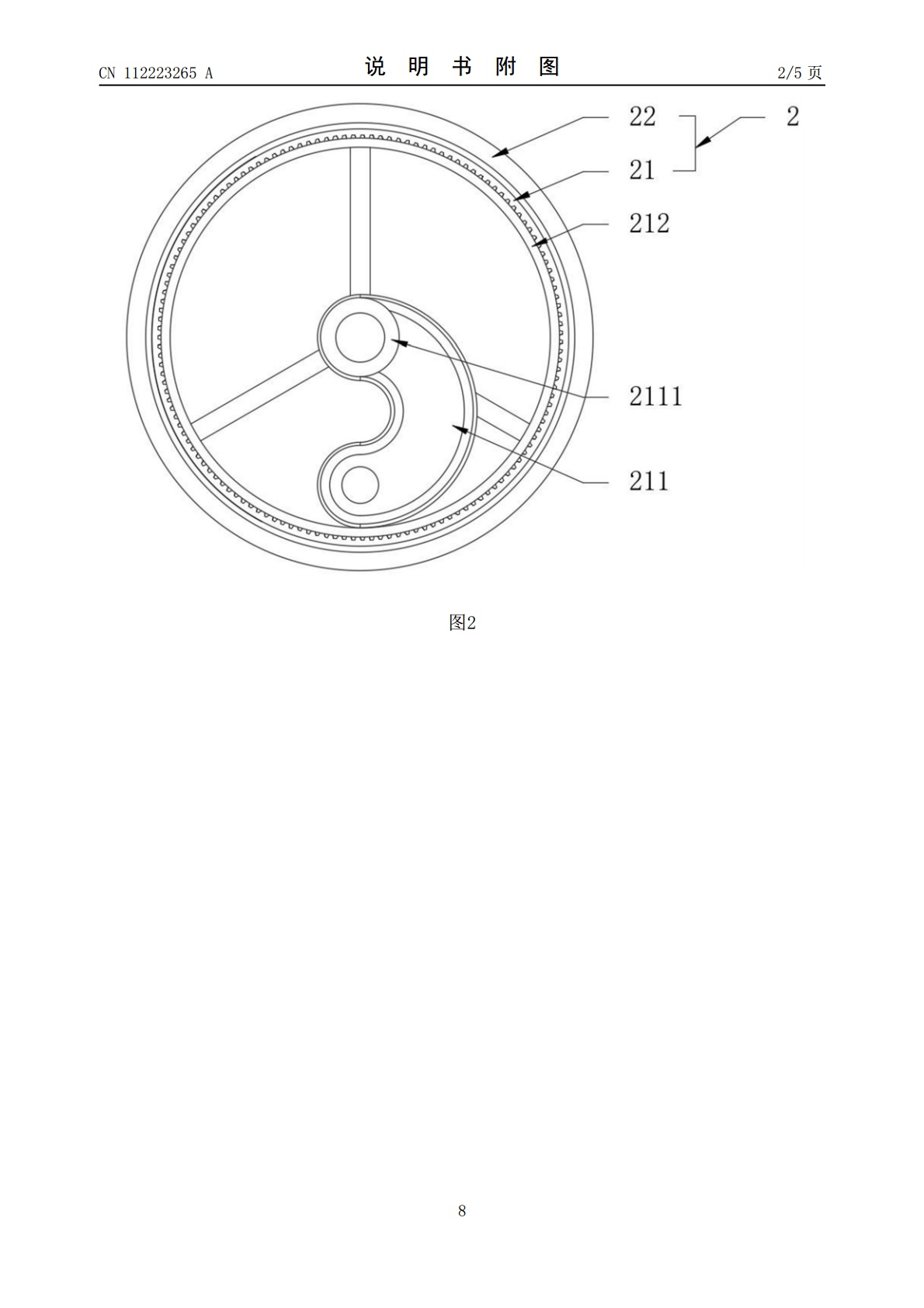
本发明公开了一种多轴工业机器人固定底座及组件,包括座板组合、滚包轮组和操作组件。本发明中,设置座板组合,座板组合包括矩形承载板和位于矩形承载板上部的托板,托板底部设置四个支腿板,支腿板和矩形承载板上下滑动配合,在支腿板和矩形承载板之间设置滚包轮组,滚包轮组包括内轮和滚圈,滚圈套设在内轮的外周边且为转动配合,内轮内设置弯通槽,弯通槽的一端位于内圈的轴线位置,矩形承载板下部设置的支撑板和内轮一侧的中心位置转动连接,而支腿板的一侧和弯通槽内侧壁滚动配合,由此通过转动内轮可以带动支腿板稳定提升,此种内轮旋转利用内
一种工业用机器人固定底座.pdf
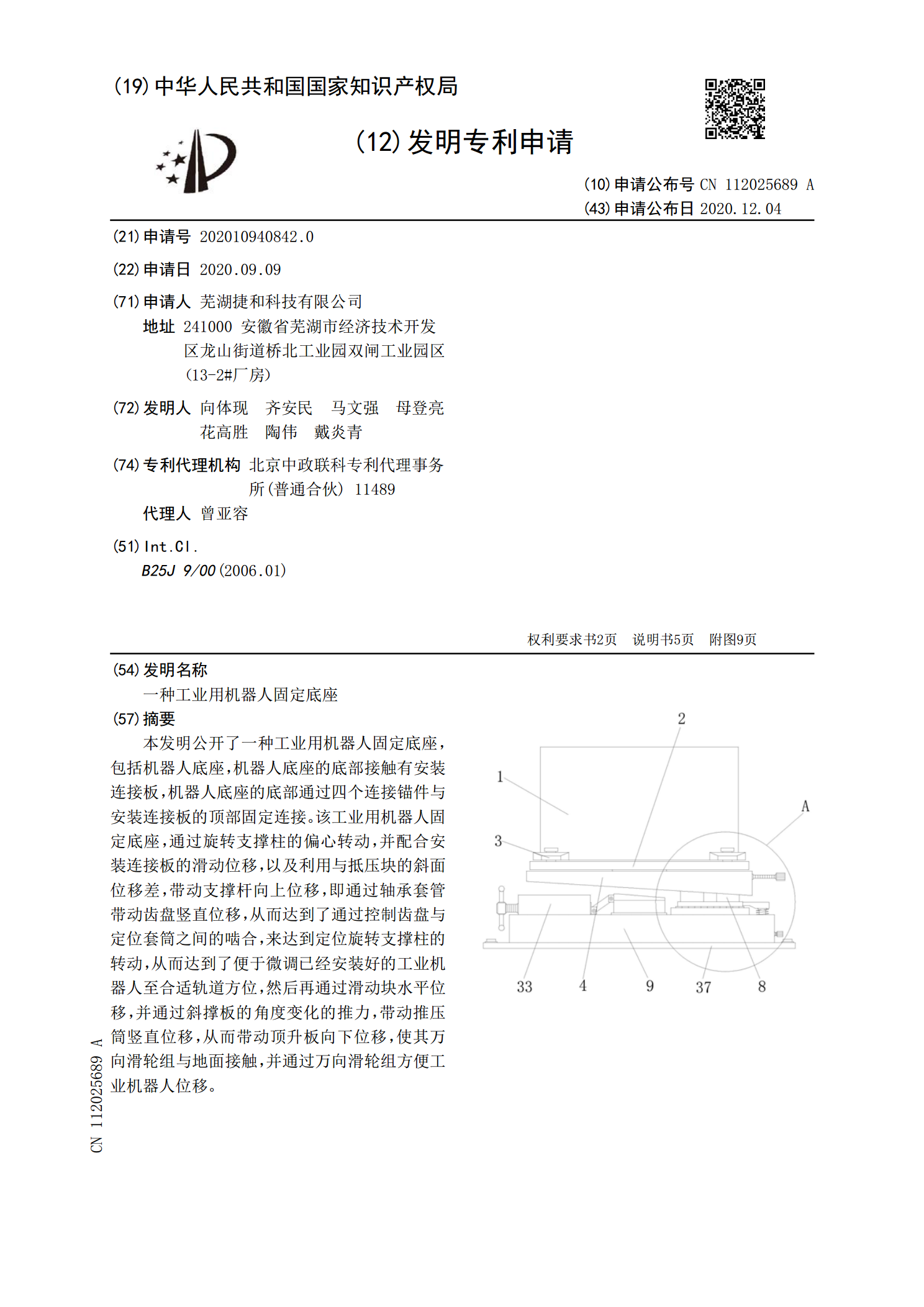
本发明公开了一种工业用机器人固定底座,包括机器人底座,机器人底座的底部接触有安装连接板,机器人底座的底部通过四个连接锚件与安装连接板的顶部固定连接。该工业用机器人固定底座,通过旋转支撑柱的偏心转动,并配合安装连接板的滑动位移,以及利用与抵压块的斜面位移差,带动支撑杆向上位移,即通过轴承套管带动齿盘竖直位移,从而达到了通过控制齿盘与定位套筒之间的啮合,来达到定位旋转支撑柱的转动,从而达到了便于微调已经安装好的工业机器人至合适轨道方位,然后再通过滑动块水平位移,并通过斜撑板的角度变化的推力,带动推压筒竖直位移

一种用于多轴式工业机器人视觉采集固定机构.pdf
本发明公开了一种用于多轴式工业机器人视觉采集固定机构,属于工业机器人技术领域,解决了在工业机器人进行视觉采集时,视觉采集装置容易受到外界环境的影响,进而导致采集效果不理想的问题;其技术特征是:包括挂件、壳体、升降座和视觉采集装置,所述壳体左侧壁对称焊接两个挂件,所述挂件上安装销孔,所述壳体内腔顶部固定焊接工作电机,所述工作电机左侧输出端固定焊接第一齿轮,所述第一齿轮下方设置转轴,所述转轴下方设置升降座,所述升降座下表面中间位置固定焊接连接杆,连接杆下端固定焊接视觉采集装置;本发明能够实现对采集装置进行充分
一种智能机器人的底座组件.pdf
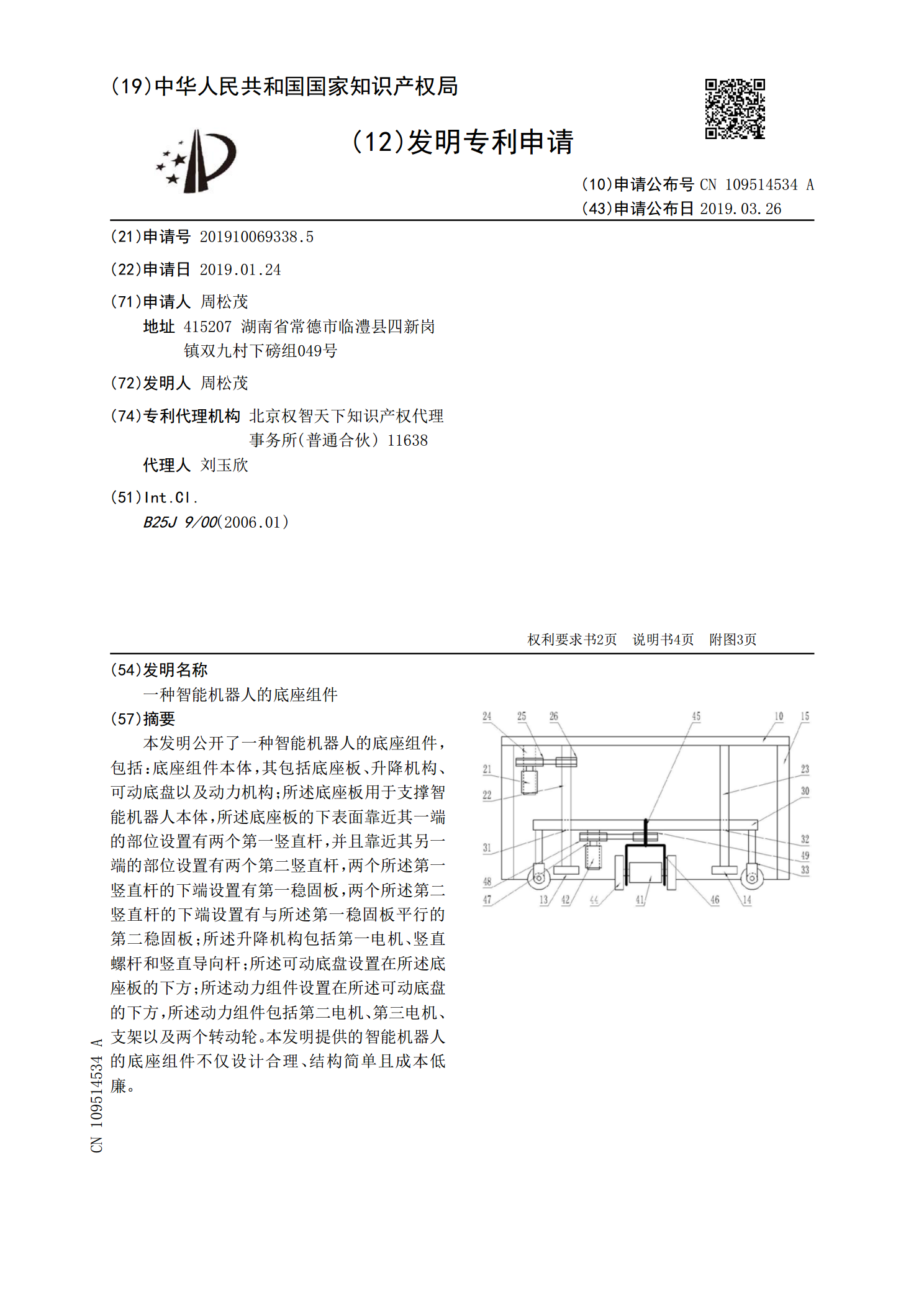
本发明公开了一种智能机器人的底座组件,包括:底座组件本体,其包括底座板、升降机构、可动底盘以及动力机构;所述底座板用于支撑智能机器人本体,所述底座板的下表面靠近其一端的部位设置有两个第一竖直杆,并且靠近其另一端的部位设置有两个第二竖直杆,两个所述第一竖直杆的下端设置有第一稳固板,两个所述第二竖直杆的下端设置有与所述第一稳固板平行的第二稳固板;所述升降机构包括第一电机、竖直螺杆和竖直导向杆;所述可动底盘设置在所述底座板的下方;所述动力组件设置在所述可动底盘的下方,所述动力组件包括第二电机、第三电机、支架以及
固定轴组件.pdf
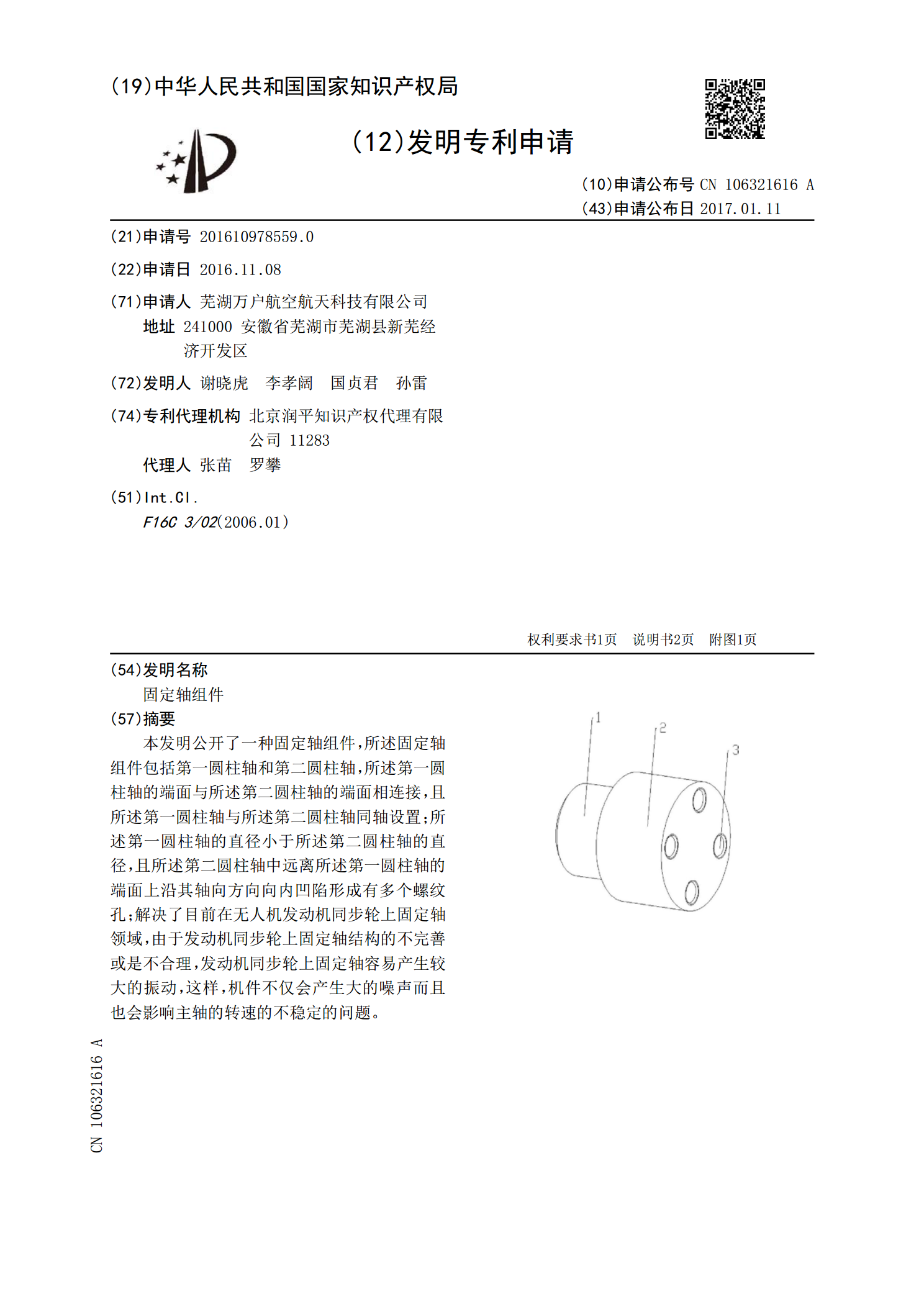
本发明公开了一种固定轴组件,所述固定轴组件包括第一圆柱轴和第二圆柱轴,所述第一圆柱轴的端面与所述第二圆柱轴的端面相连接,且所述第一圆柱轴与所述第二圆柱轴同轴设置;所述第一圆柱轴的直径小于所述第二圆柱轴的直径,且所述第二圆柱轴中远离所述第一圆柱轴的端面上沿其轴向方向向内凹陷形成有多个螺纹孔;解决了目前在无人机发动机同步轮上固定轴领域,由于发动机同步轮上固定轴结构的不完善或是不合理,发动机同步轮上固定轴容易产生较大的振动,这样,机件不仅会产生大的噪声而且也会影响主轴的转速的不稳定的问题。