
一种应用于工业机器人的固定机构.pdf

纪阳****公主


1/10
2/10

3/10

4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种应用于工业机器人的固定机构.pdf
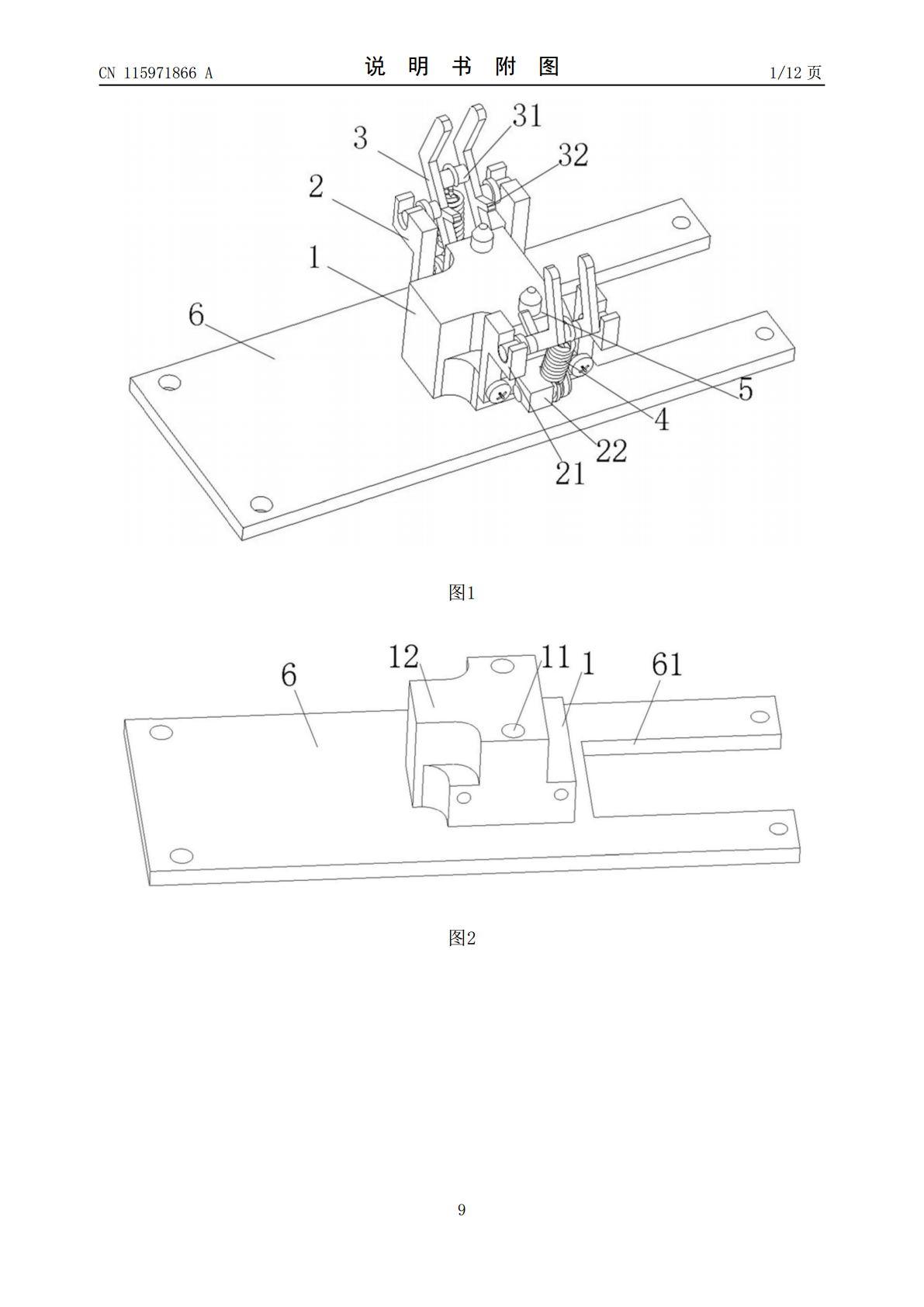
本申请实施例公开一种应用于工业机器人的固定机构,固定机构包括:基座;布置于基座侧壁面上的两个夹持组件;两个夹持组件分别包括:结合固定于基座侧壁面上的支撑框架;形成于支撑框架上的第一安装部,第一安装部包括有第一轴线,安装在支撑框架上的夹持臂;夹持臂可围绕第二轴线转动,形成于夹持臂上的第二安装部,第二安装部包括有第三轴线,连接在第一安装部和第二安装部上的弹性件,第一轴线和第二轴线形成的第一平面,第三轴线和第二轴线形成的第二平面,当夹持臂处于张开状态时,第一平面与第二平面形成开口方向背离基座的第一夹角。本发明的

一种工业机器人焊接固定机构.pdf
本发明公开了一种工业机器人焊接固定机构,属于焊接固定技术领域。一种工业机器人焊接固定机构,包括安装板,还包括:第一转动杆、第二转动杆,均转动连接在所述安装板的上端边缘,并且相互垂直;第一板件、第二板件,均滑动连接在所述安装板上端,并且分别与所述第一转动杆、第二转动杆相贴;螺纹杆,转动连接在所述安装板的上端;推块,转动连接在所述螺纹杆靠近第一板件一端,并且与安装板滑动连接;对称的顶杆,转动连接在推块的两侧,并且分别第一板件、第二板件相贴;本发明中通过第一转动杆、第二转动杆、推块、顶杆便于对板件进行夹紧固定,

一种用于多轴式工业机器人视觉采集固定机构.pdf
本发明公开了一种用于多轴式工业机器人视觉采集固定机构,属于工业机器人技术领域,解决了在工业机器人进行视觉采集时,视觉采集装置容易受到外界环境的影响,进而导致采集效果不理想的问题;其技术特征是:包括挂件、壳体、升降座和视觉采集装置,所述壳体左侧壁对称焊接两个挂件,所述挂件上安装销孔,所述壳体内腔顶部固定焊接工作电机,所述工作电机左侧输出端固定焊接第一齿轮,所述第一齿轮下方设置转轴,所述转轴下方设置升降座,所述升降座下表面中间位置固定焊接连接杆,连接杆下端固定焊接视觉采集装置;本发明能够实现对采集装置进行充分
一种催眠机器人固定机构.pdf
本发明是一种催眠机器人用固定机构,用于被催眠者在机器人内的固定和身体各个部位的姿态调整。该固定机构包括支撑板,背板,小臂扶手,旋转轴,手握器,座板,旋转轴B,腿部支撑板,脚踏器,旋转轴C,脚踏板,腹带插座,腹带,双肩带,肩带插座和头戴设备。本发明使用该固定机构对失眠者进行固定和针对性姿态调整,配合相应的电子检测和微环境控制系统,是催眠治疗的核心部件,也是失眠者看得到,直接接触,体验最深的部件,在整个机器人系统中占有重要的地位。本发明结构合理,实际应用中根据情况调整留有余地,各部可以预留相关传感器的安装孔位
一种工业用机器人固定底座.pdf
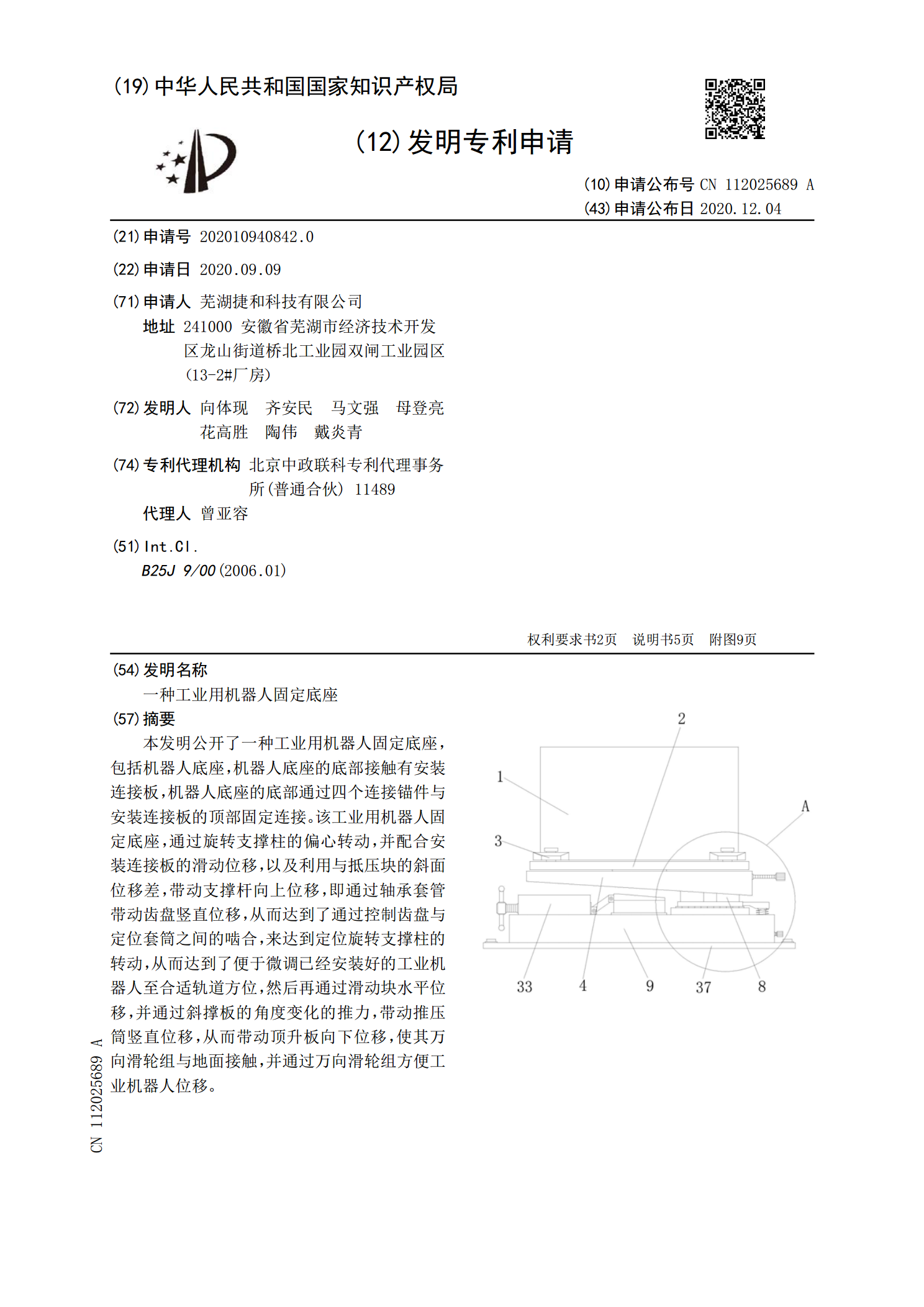
本发明公开了一种工业用机器人固定底座,包括机器人底座,机器人底座的底部接触有安装连接板,机器人底座的底部通过四个连接锚件与安装连接板的顶部固定连接。该工业用机器人固定底座,通过旋转支撑柱的偏心转动,并配合安装连接板的滑动位移,以及利用与抵压块的斜面位移差,带动支撑杆向上位移,即通过轴承套管带动齿盘竖直位移,从而达到了通过控制齿盘与定位套筒之间的啮合,来达到定位旋转支撑柱的转动,从而达到了便于微调已经安装好的工业机器人至合适轨道方位,然后再通过滑动块水平位移,并通过斜撑板的角度变化的推力,带动推压筒竖直位移