
基于视觉的移动分拣机器人及其分拣方法.pdf

是你****芹呀


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于视觉的移动分拣机器人及其分拣方法.pdf
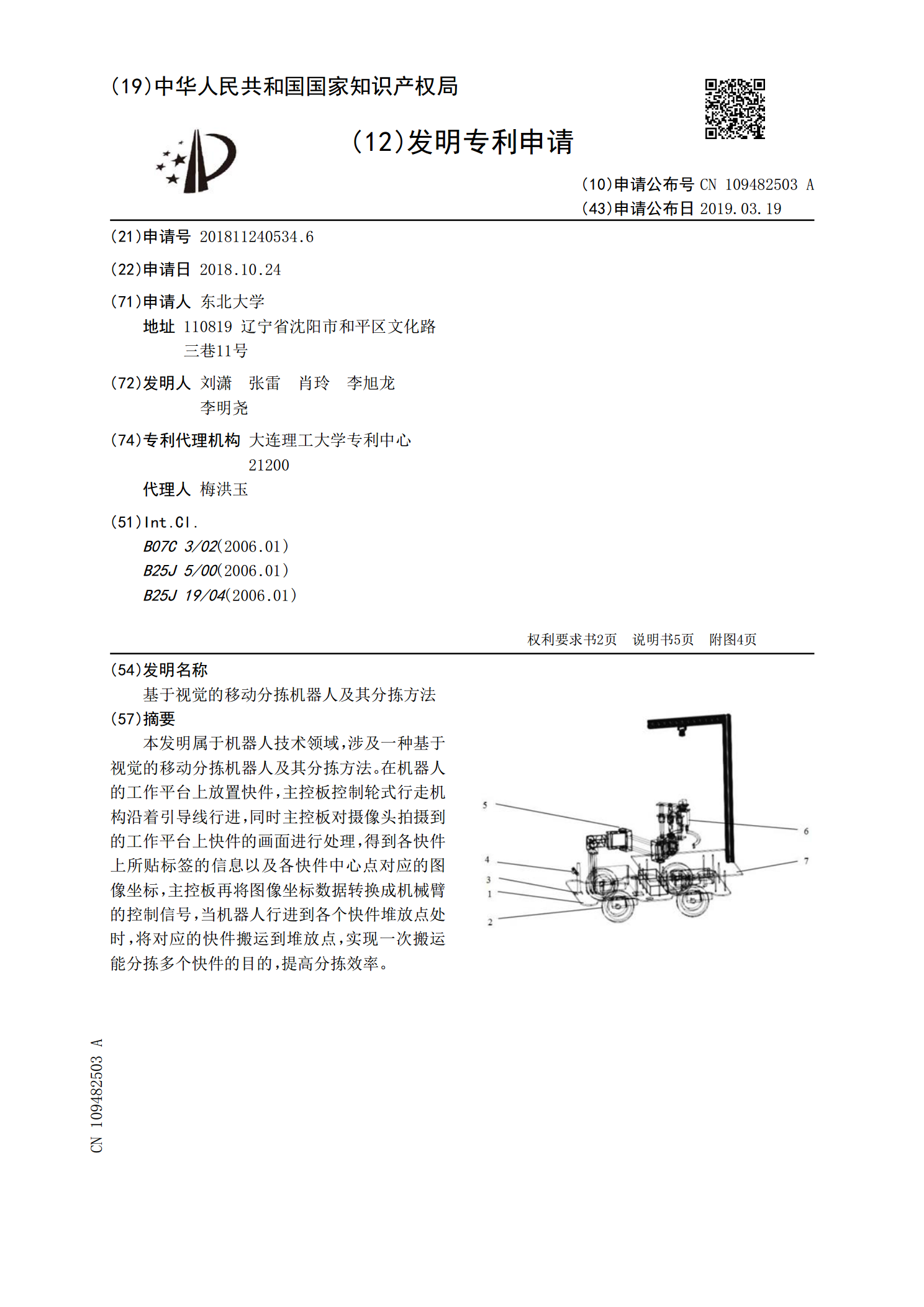
本发明属于机器人技术领域,涉及一种基于视觉的移动分拣机器人及其分拣方法。在机器人的工作平台上放置快件,主控板控制轮式行走机构沿着引导线行进,同时主控板对摄像头拍摄到的工作平台上快件的画面进行处理,得到各快件上所贴标签的信息以及各快件中心点对应的图像坐标,主控板再将图像坐标数据转换成机械臂的控制信号,当机器人行进到各个快件堆放点处时,将对应的快件搬运到堆放点,实现一次搬运能分拣多个快件的目的,提高分拣效率。
基于视觉检测的机器人分拣方法.pdf
本发明基于视觉检测的机器人分拣方法,包括如下步骤:1)进行数据包处理;2)产品定心;3)产品过滤:4)更新机器人抓取范围,并进行抓取装箱:机器人从相机列表中提取产品,在每个扫面周期中会扫面一遍列表,当产品在机器人抓取范围内时,该产品的机器人抓取属性被置为True;当机器人抓取时会判断改产品的机器人抓取属性是否为True,若为True,机器人则会抓取,抓取结束后,该产品的机器人抓取属性被置为False;5)装箱时进行计算,在技术达到满箱值时,进行包装箱更换。

基于视觉的移动分拣机器人系统研究.docx
基于视觉的移动分拣机器人系统研究随着电子商务市场的不断壮大,物流领域也发生了翻天覆地的变化,如今物流业所占的比重越来越大,而分拣环节则是物流过程中不可或缺的一环。传统的分拣方式大多需要大量人力参与,分拣效率低且成本高。因此,研发一种高效且成本相对较低的自动化分拣系统成为了亟待解决的问题。在这一背景下,基于视觉的移动分拣机器人系统应运而生。一、基于视觉的移动分拣机器人系统的概念基于视觉的移动分拣机器人系统可以实现机器人在仓库中通过视觉识别、分拣、移动等操作实现物品的分拣和分类。这一系统是依据机器人技术、计算
一种基于机器视觉的智能分拣装置及其分拣方法.pdf
本发明公开了一种基于机器视觉的智能分拣装置及其分拣方法,所述装置包括分拣传动机构、机械手分拣机构、支撑架、视觉分拣机构和PLC控制器;所述分拣传动机构包括上料工位、平流检测工位、运输工位、移交出料工位和平流工位;所述视觉分拣机构包括包装状态系统、辨别形状系统、辨色系统和相机,包装状态系统、辨别形状系统和辨色系统共享相机的工位,相机安装在每个支撑架的底部外壁上,每个包装状态系统判定物品的包装状态并归类,结合颜色和形状,锁定目标物品进行分流,相机主要功能为定位、识别和通过PLC控制器控制机械手分拣机构进行工作
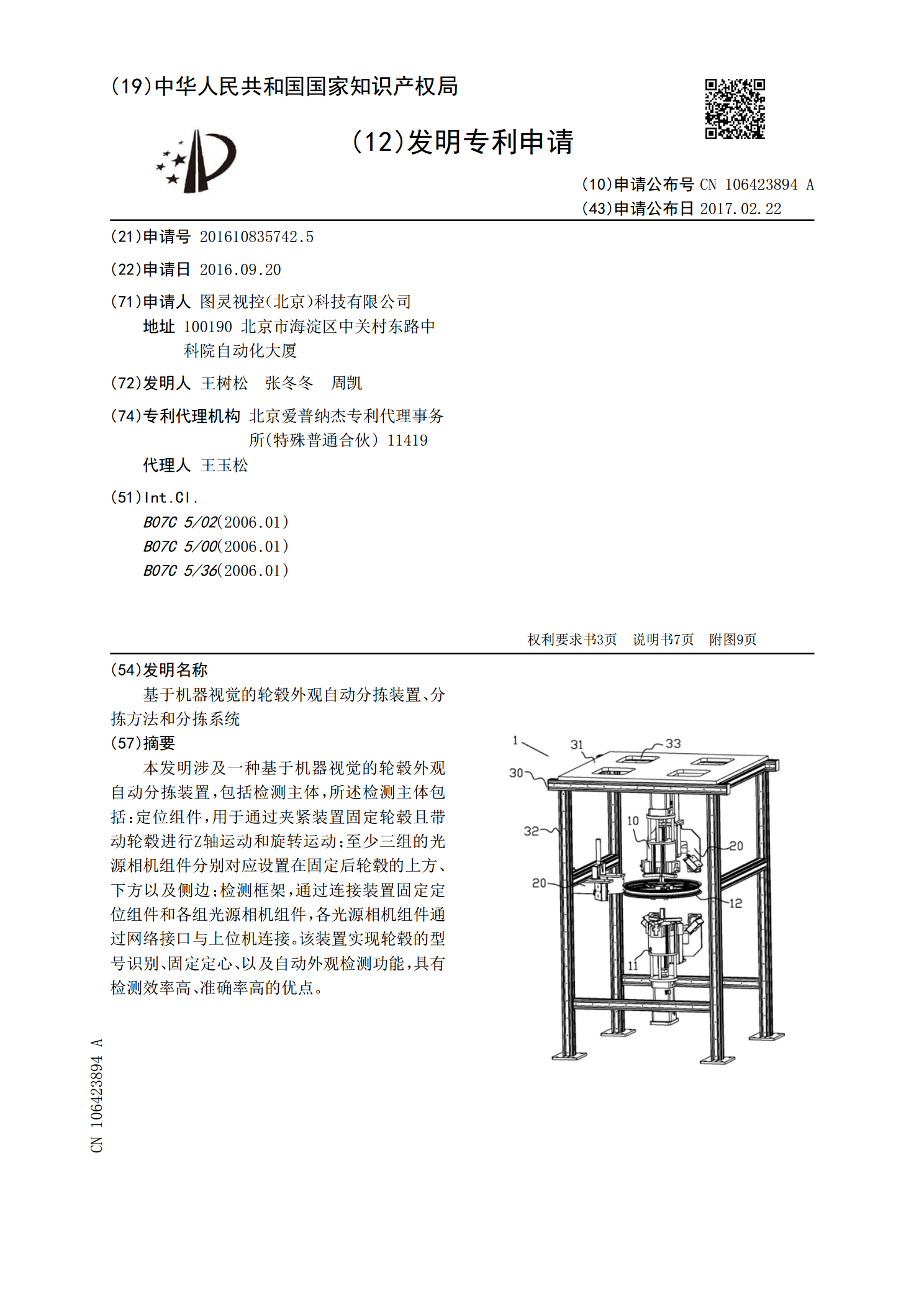
基于机器视觉的轮毂外观自动分拣装置、分拣方法和分拣系统.pdf
本发明涉及一种基于机器视觉的轮毂外观自动分拣装置,包括检测主体,所述检测主体包括:定位组件,用于通过夹紧装置固定轮毂且带动轮毂进行Z轴运动和旋转运动;至少三组的光源相机组件分别对应设置在固定后轮毂的上方、下方以及侧边;检测框架,通过连接装置固定定位组件和各组光源相机组件,各光源相机组件通过网络接口与上位机连接。该装置实现轮毂的型号识别、固定定心、以及自动外观检测功能,具有检测效率高、准确率高的优点。