
基于视觉的移动分拣机器人系统研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于视觉的移动分拣机器人系统研究.docx
基于视觉的移动分拣机器人系统研究随着电子商务市场的不断壮大,物流领域也发生了翻天覆地的变化,如今物流业所占的比重越来越大,而分拣环节则是物流过程中不可或缺的一环。传统的分拣方式大多需要大量人力参与,分拣效率低且成本高。因此,研发一种高效且成本相对较低的自动化分拣系统成为了亟待解决的问题。在这一背景下,基于视觉的移动分拣机器人系统应运而生。一、基于视觉的移动分拣机器人系统的概念基于视觉的移动分拣机器人系统可以实现机器人在仓库中通过视觉识别、分拣、移动等操作实现物品的分拣和分类。这一系统是依据机器人技术、计算
基于视觉的移动分拣机器人及其分拣方法.pdf
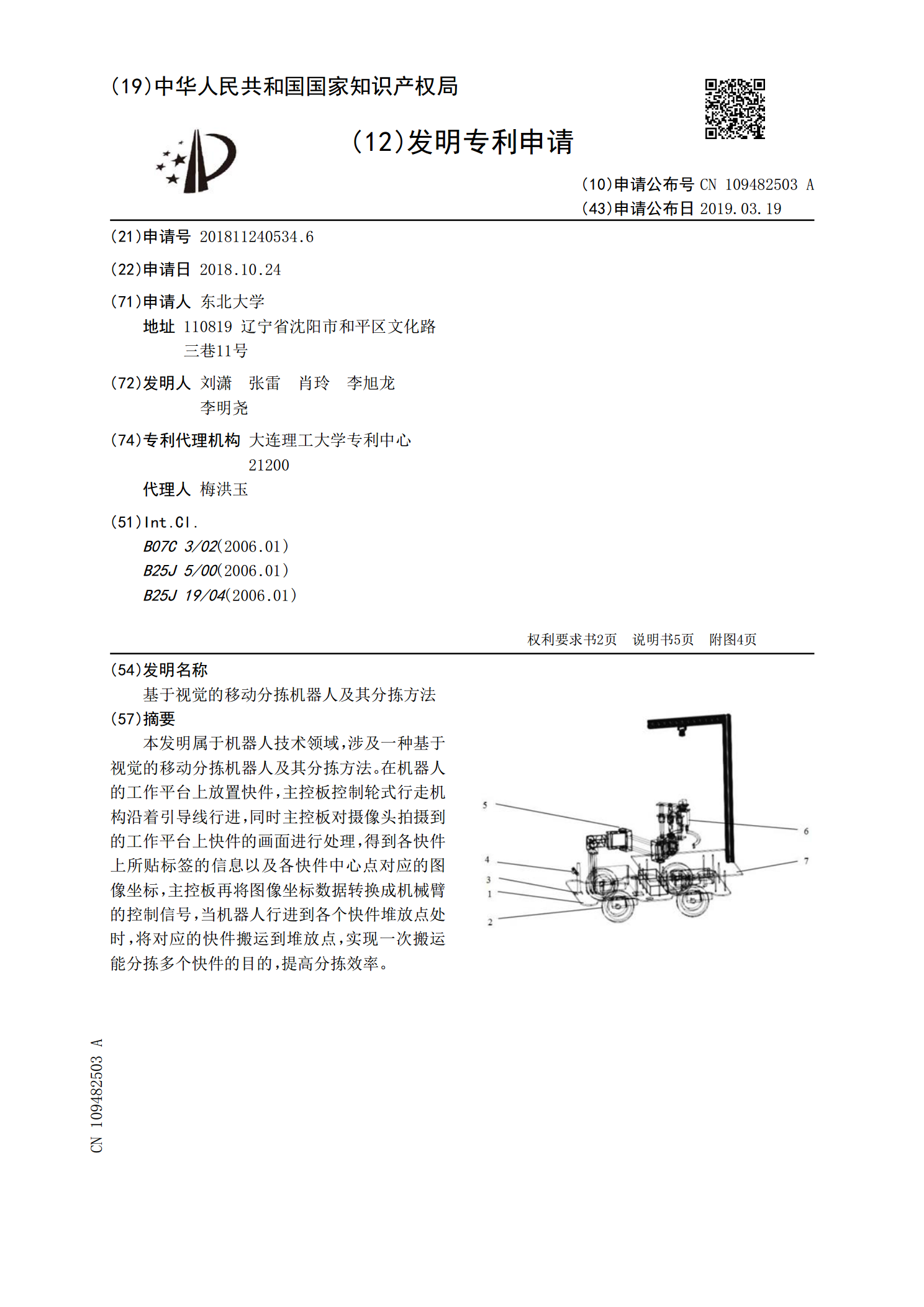
本发明属于机器人技术领域,涉及一种基于视觉的移动分拣机器人及其分拣方法。在机器人的工作平台上放置快件,主控板控制轮式行走机构沿着引导线行进,同时主控板对摄像头拍摄到的工作平台上快件的画面进行处理,得到各快件上所贴标签的信息以及各快件中心点对应的图像坐标,主控板再将图像坐标数据转换成机械臂的控制信号,当机器人行进到各个快件堆放点处时,将对应的快件搬运到堆放点,实现一次搬运能分拣多个快件的目的,提高分拣效率。

基于机器视觉的工业机器人分拣系统研究.docx
基于机器视觉的工业机器人分拣系统研究随着工业4.0时代的到来,工业自动化程度不断提高,机器人应用越来越广泛,尤其是在分拣领域。传统的机械分拣方式已经无法满足高效、高精度、高可靠性的分拣需求,基于机器视觉的工业机器人分拣系统随之应运而生。一、机器视觉在工业机器人分拣系统中的应用机器视觉是现代视觉技术的一种,通过模拟人眼进行图像信号采集、处理和分析,获取目标物的形状、大小、颜色、位置、方向等信息。基于机器视觉的工业机器人分拣系统主要由图像处理设备、分析软件和工业机器人三部分组成。首先,通过图像处理设备获取物品

基于机器视觉的工业机器人分拣系统研究的任务书.docx
基于机器视觉的工业机器人分拣系统研究的任务书一、研究背景随着工业化程度的不断提高,工业机器人已成为工业制造中不可或缺的重要组成部分。工业机器人在生产过程中可以代替工人完成相应的工作任务,提高生产效率和品质,降低生产成本。其中,工业机器人的分拣应用被广泛关注和应用。传统的工业机器人分拣系统需要人工制定规则和参数,且对分拣物品的形态、颜色等限制较多,无法满足当前多品种、快速变化的生产需求。因此,基于机器视觉的工业机器人分拣系统作为一种新型的自主自适应软件控制系统,能够通过自身的学习和适应,根据不同物品的形态、

物料分拣机器人视觉定位系统研究.docx
物料分拣机器人视觉定位系统研究随着移动智能化技术和物联网技术的快速发展,机器人技术已经逐渐融入了我们的生产生活中。尤其在物流、制造行业中,机器人可以帮助企业实现生产自动化和提高生产效率。而物料分拣机器人作为一种智能高效的生产设备,越来越受到企业和市场的关注。1.物料分拣机器人的应用场景和技术需求物料分拣机器人主要应用于生产、制造、物流等环节的物料分拣和库存管理。传统的物料分拣需要耗费大量的人力物力,不仅效率低下,还容易出现人为误差,并且难以适应高负荷和多样化的物料处理。而物料分拣机器人可以利用视觉定位系统