
一种基于机器视觉的智能分拣装置及其分拣方法.pdf

是你****平呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于机器视觉的智能分拣装置及其分拣方法.pdf
本发明公开了一种基于机器视觉的智能分拣装置及其分拣方法,所述装置包括分拣传动机构、机械手分拣机构、支撑架、视觉分拣机构和PLC控制器;所述分拣传动机构包括上料工位、平流检测工位、运输工位、移交出料工位和平流工位;所述视觉分拣机构包括包装状态系统、辨别形状系统、辨色系统和相机,包装状态系统、辨别形状系统和辨色系统共享相机的工位,相机安装在每个支撑架的底部外壁上,每个包装状态系统判定物品的包装状态并归类,结合颜色和形状,锁定目标物品进行分流,相机主要功能为定位、识别和通过PLC控制器控制机械手分拣机构进行工作
基于视觉的移动分拣机器人及其分拣方法.pdf
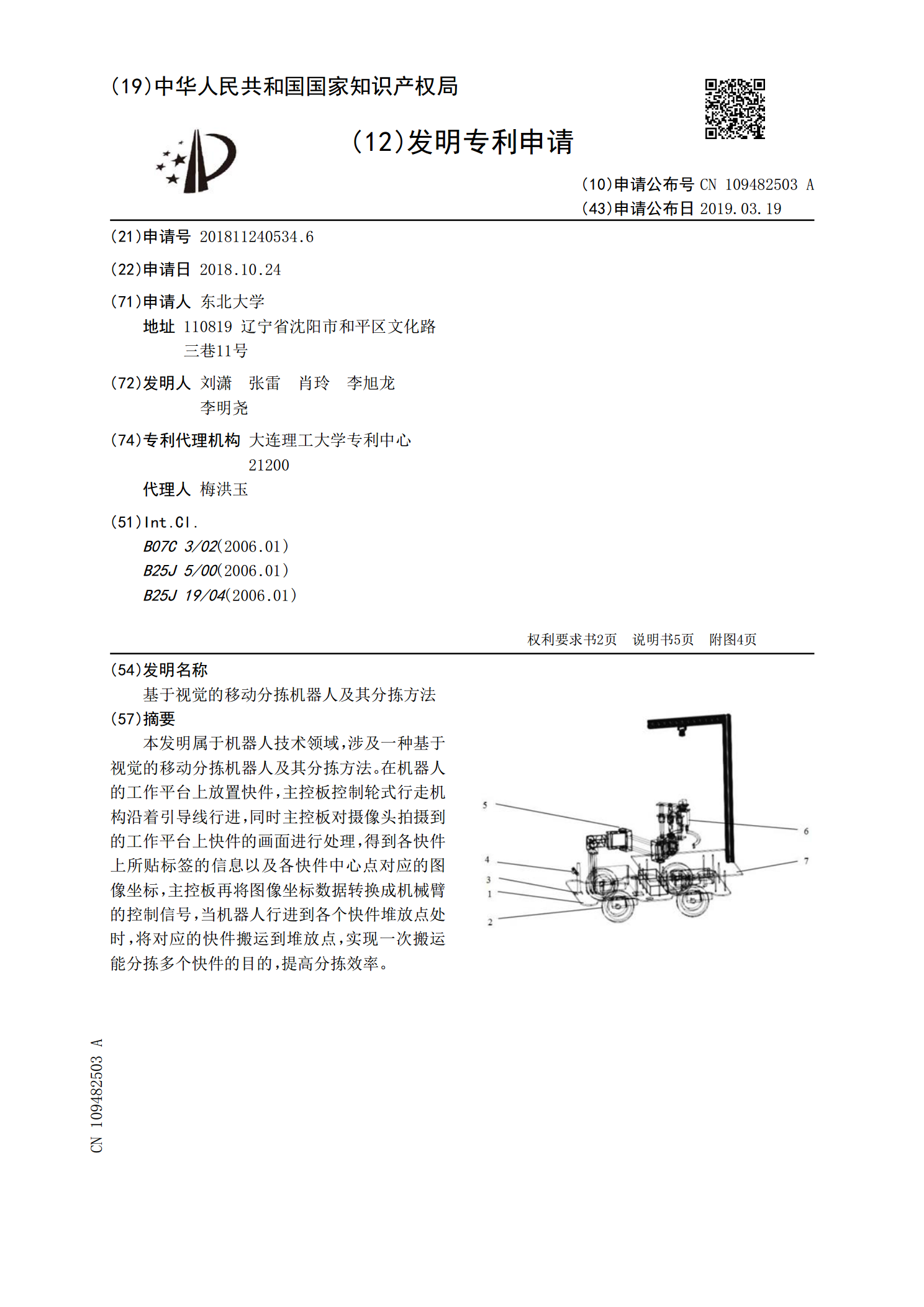
本发明属于机器人技术领域,涉及一种基于视觉的移动分拣机器人及其分拣方法。在机器人的工作平台上放置快件,主控板控制轮式行走机构沿着引导线行进,同时主控板对摄像头拍摄到的工作平台上快件的画面进行处理,得到各快件上所贴标签的信息以及各快件中心点对应的图像坐标,主控板再将图像坐标数据转换成机械臂的控制信号,当机器人行进到各个快件堆放点处时,将对应的快件搬运到堆放点,实现一次搬运能分拣多个快件的目的,提高分拣效率。
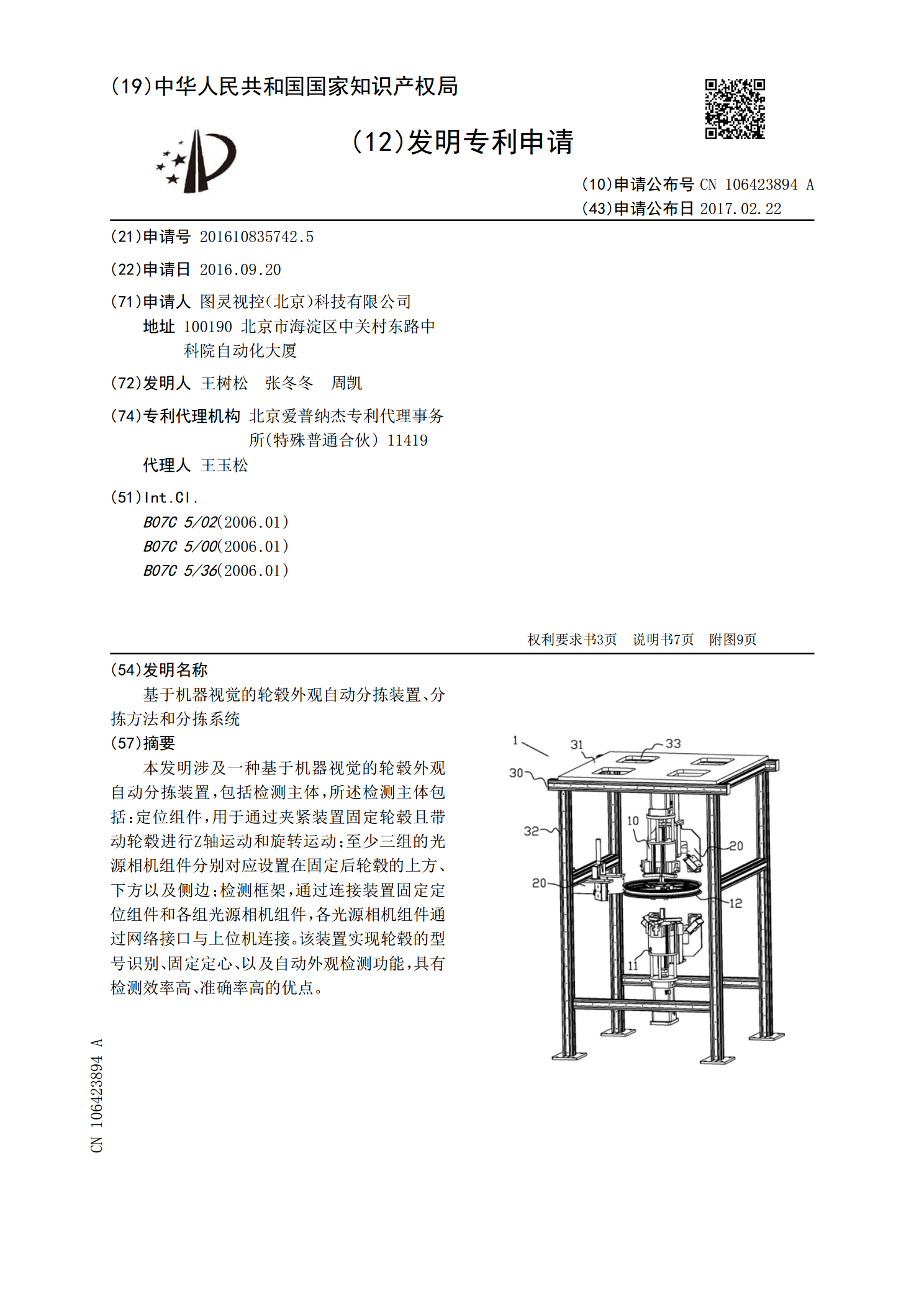
基于机器视觉的轮毂外观自动分拣装置、分拣方法和分拣系统.pdf
本发明涉及一种基于机器视觉的轮毂外观自动分拣装置,包括检测主体,所述检测主体包括:定位组件,用于通过夹紧装置固定轮毂且带动轮毂进行Z轴运动和旋转运动;至少三组的光源相机组件分别对应设置在固定后轮毂的上方、下方以及侧边;检测框架,通过连接装置固定定位组件和各组光源相机组件,各光源相机组件通过网络接口与上位机连接。该装置实现轮毂的型号识别、固定定心、以及自动外观检测功能,具有检测效率高、准确率高的优点。
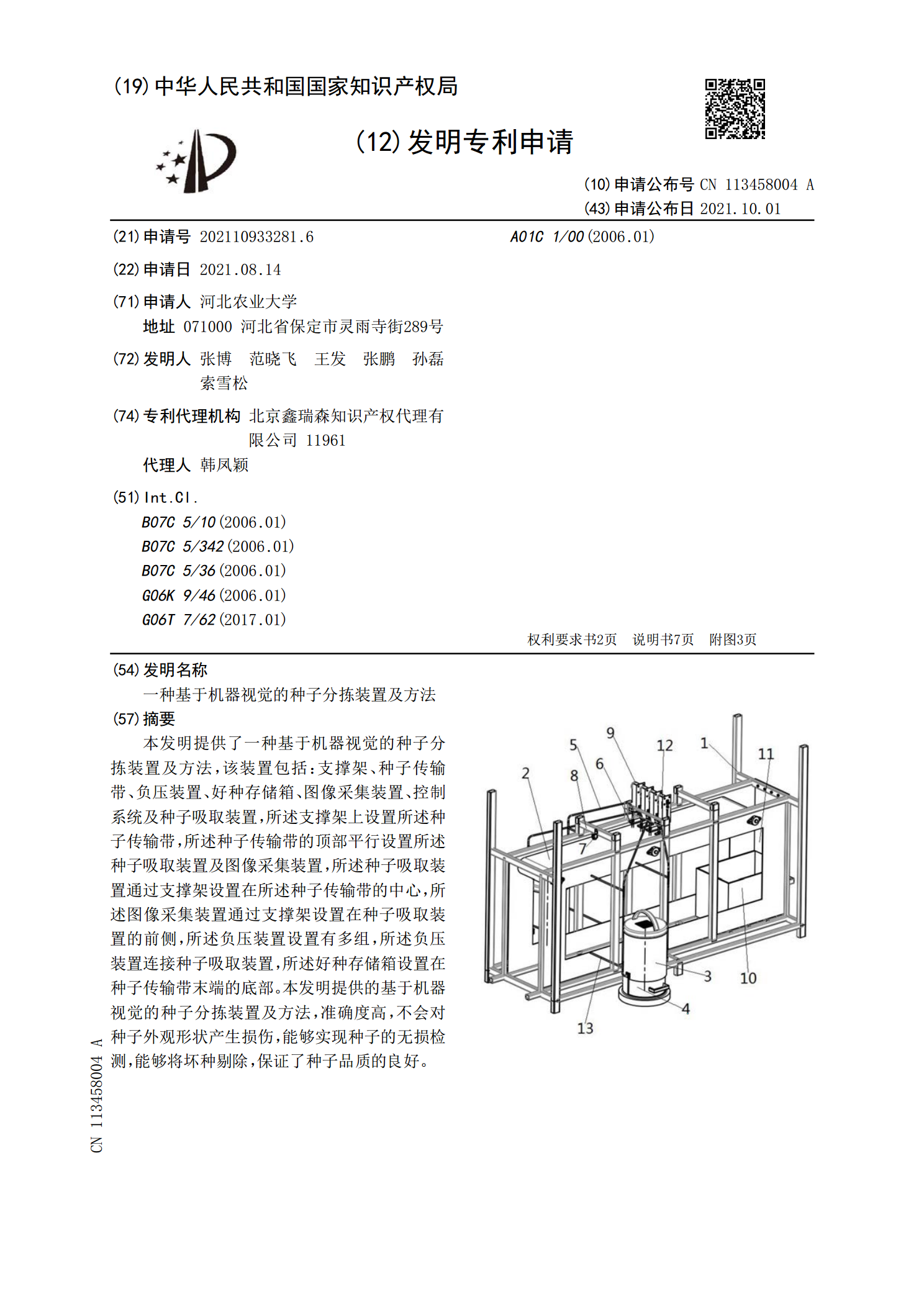
一种基于机器视觉的种子分拣装置及方法.pdf
本发明提供了一种基于机器视觉的种子分拣装置及方法,该装置包括:支撑架、种子传输带、负压装置、好种存储箱、图像采集装置、控制系统及种子吸取装置,所述支撑架上设置所述种子传输带,所述种子传输带的顶部平行设置所述种子吸取装置及图像采集装置,所述种子吸取装置通过支撑架设置在所述种子传输带的中心,所述图像采集装置通过支撑架设置在种子吸取装置的前侧,所述负压装置设置有多组,所述负压装置连接种子吸取装置,所述好种存储箱设置在种子传输带末端的底部。本发明提供的基于机器视觉的种子分拣装置及方法,准确度高,不会对种子外观形状
一种基于机器视觉的物料分拣装置.pdf
本发明涉及机器视觉技术领域,且公开了一种基于机器视觉的物料分拣装置,包括柜体、机器视觉检测模块、控制面板和运输线,所述柜体顶部开设有凹槽,所述运输线固定安装在柜体的凹槽处,所述柜体顶部固定连接有第一立板和第二立板,所述机器视觉检测模块固定安装在第一立板底壁处,所述第二立板底壁设置有居中机构,所述运输线一端设置有分拣机构。本发明能够自动化分拣产品,能将不合格的产品分拣出来,解决了传统分拣方式依赖人工进行,导致分拣效率低下的问题。