
机器人承重底盘组件及机器人.pdf

是你****松呀

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
机器人承重底盘组件及机器人.pdf
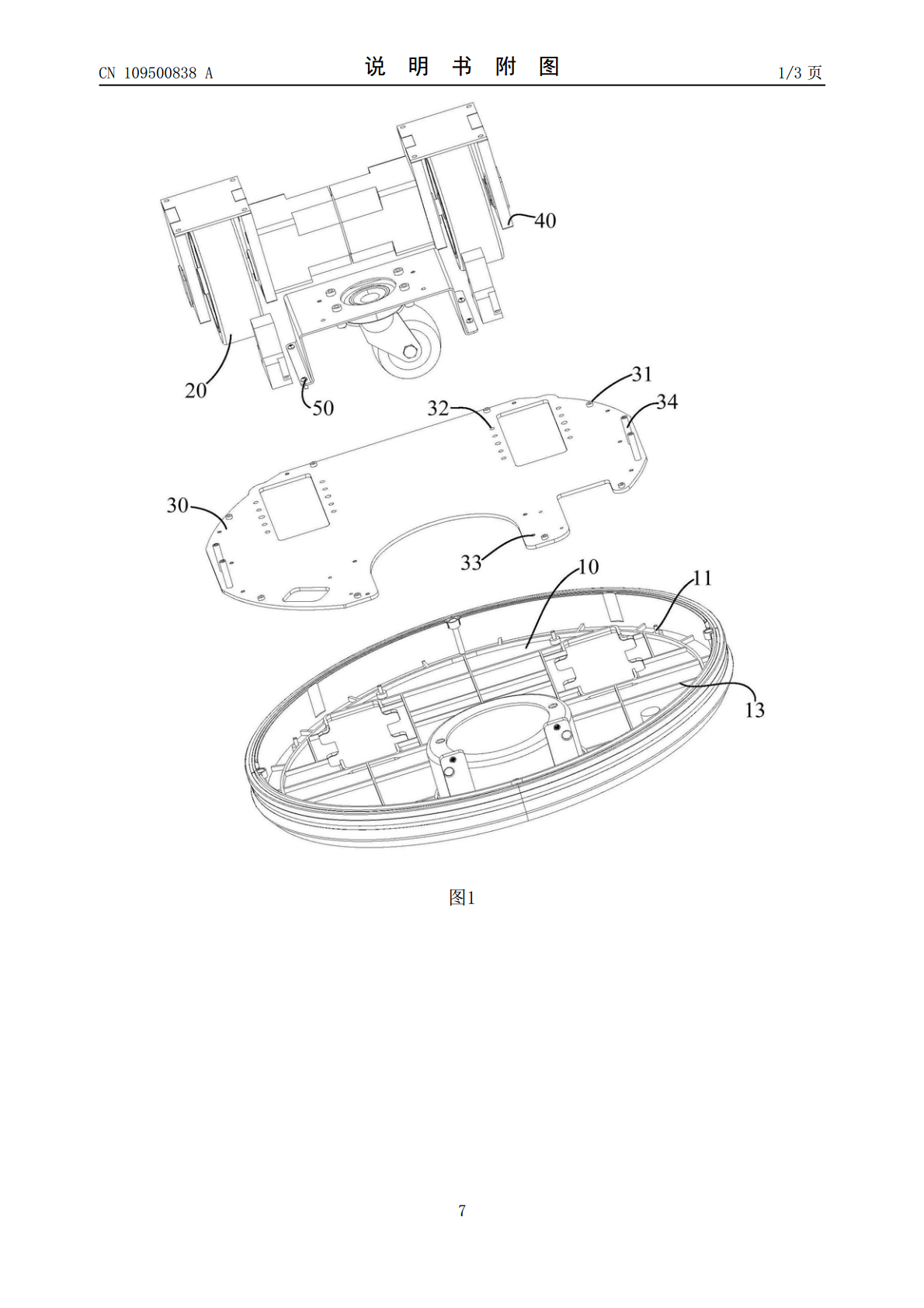
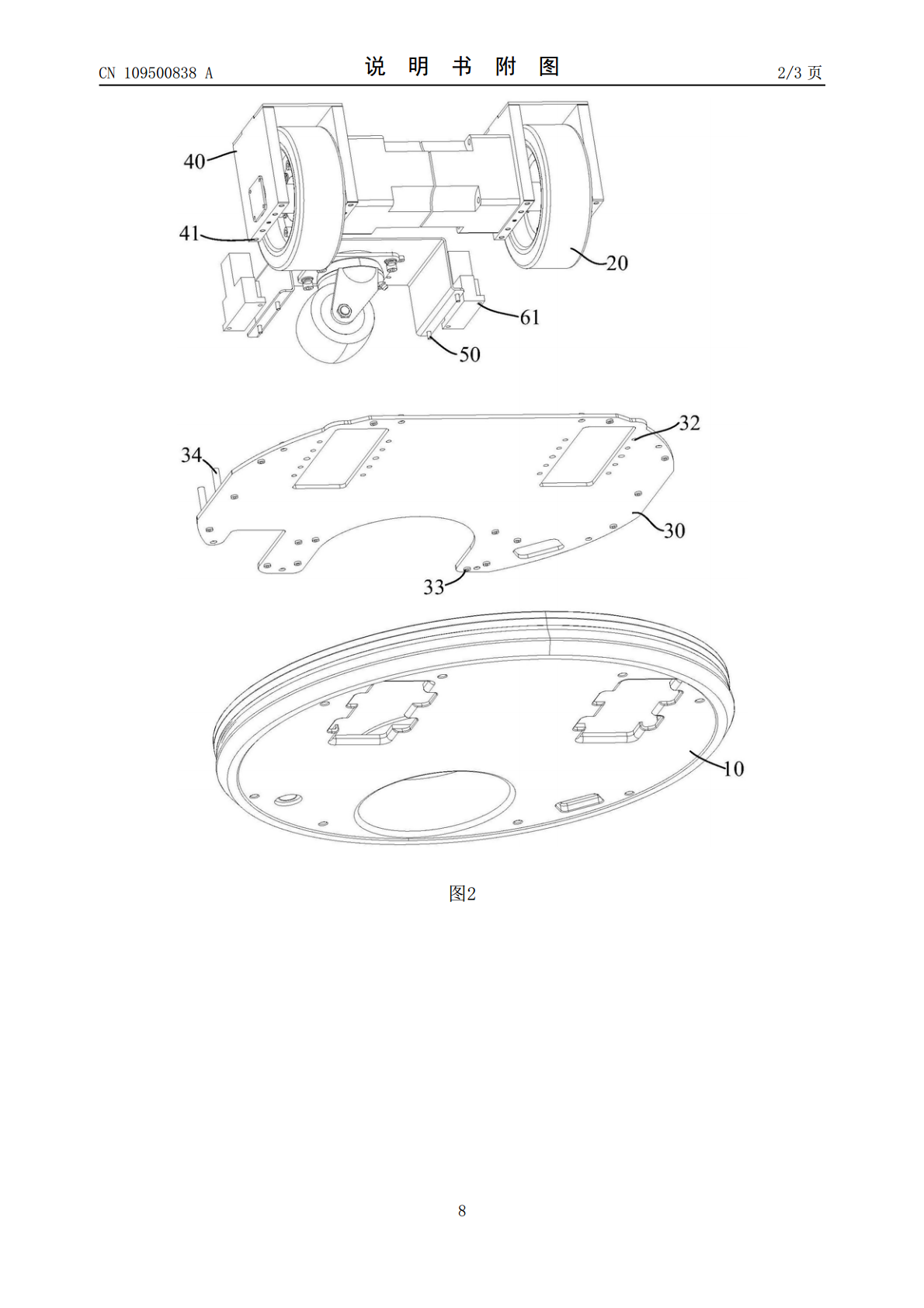
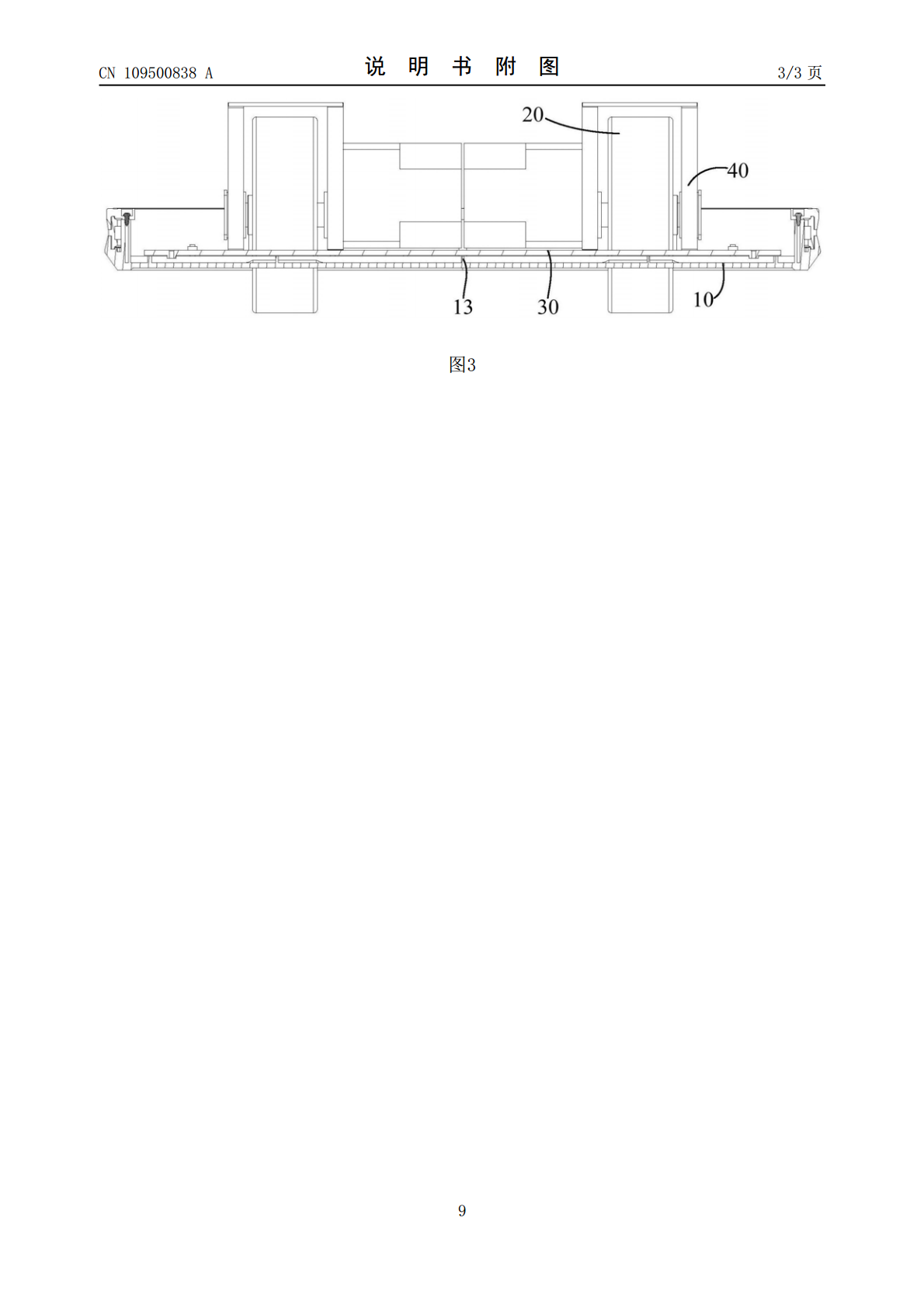
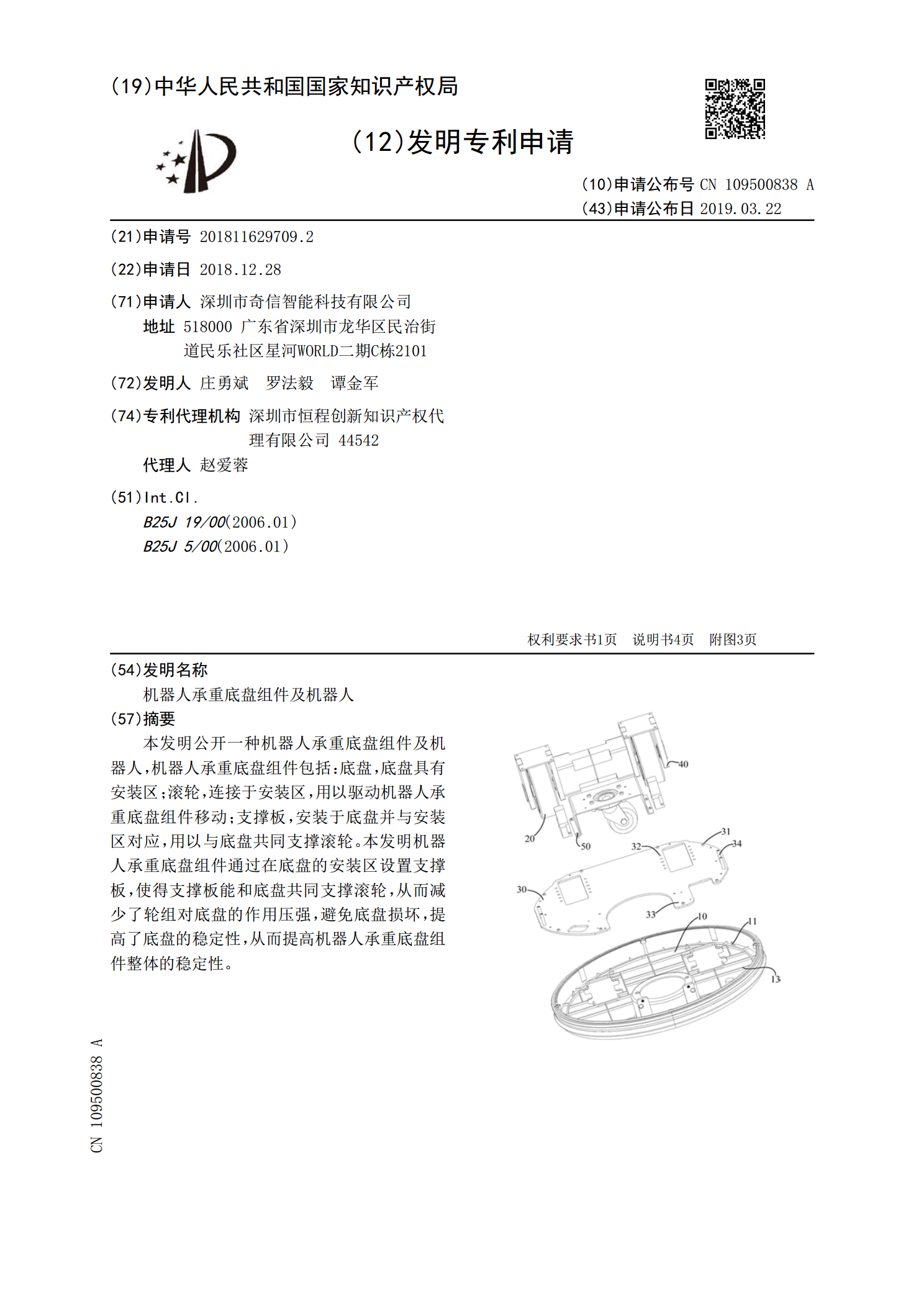
本发明公开一种机器人承重底盘组件及机器人,机器人承重底盘组件包括:底盘,底盘具有安装区;滚轮,连接于安装区,用以驱动机器人承重底盘组件移动;支撑板,安装于底盘并与安装区对应,用以与底盘共同支撑滚轮。本发明机器人承重底盘组件通过在底盘的安装区设置支撑板,使得支撑板能和底盘共同支撑滚轮,从而减少了轮组对底盘的作用压强,避免底盘损坏,提高了底盘的稳定性,从而提高机器人承重底盘组件整体的稳定性。
履带底盘组件及机器人.pdf
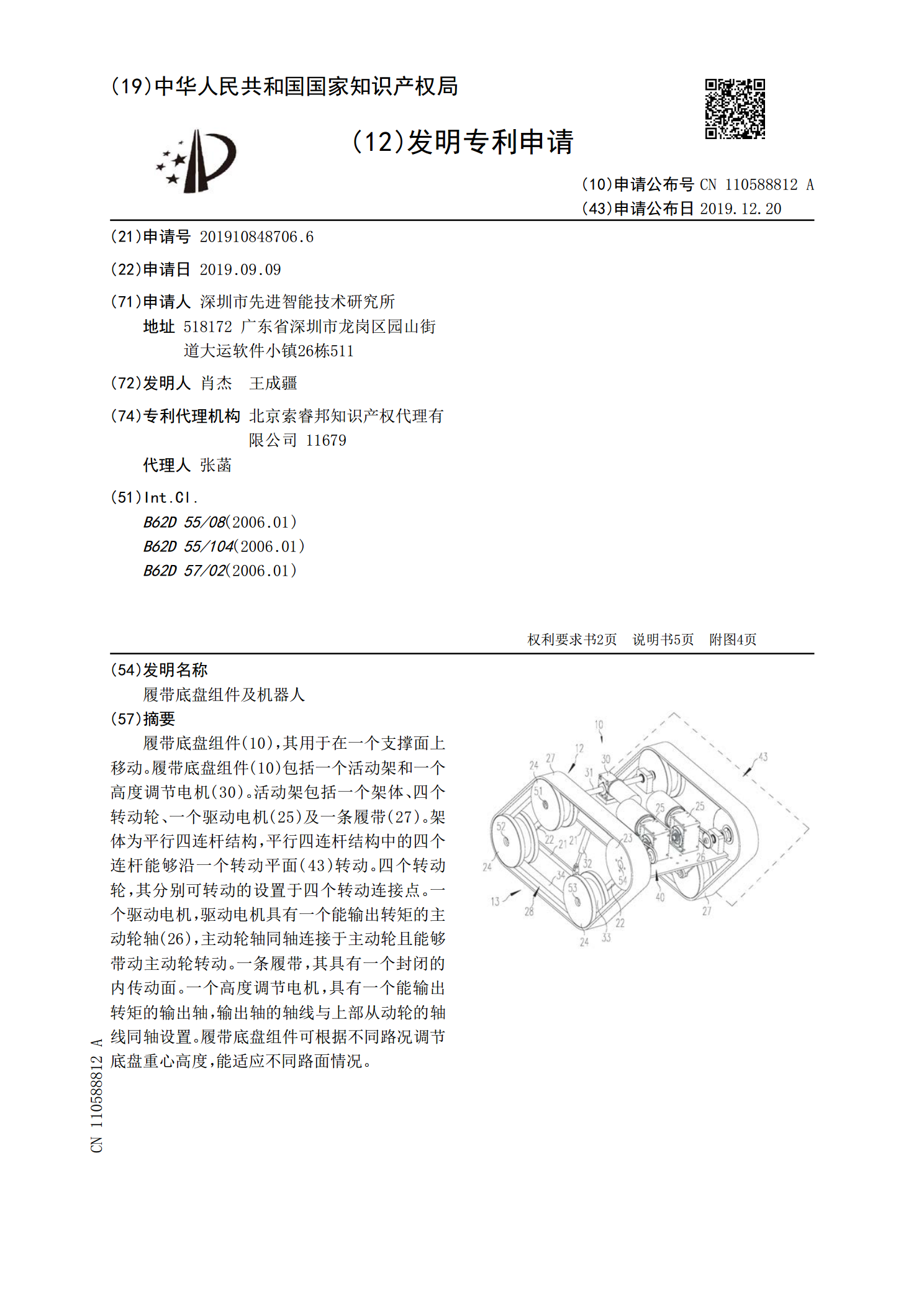
履带底盘组件(10),其用于在一个支撑面上移动。履带底盘组件(10)包括一个活动架和一个高度调节电机(30)。活动架包括一个架体、四个转动轮、一个驱动电机(25)及一条履带(27)。架体为平行四连杆结构,平行四连杆结构中的四个连杆能够沿一个转动平面(43)转动。四个转动轮,其分别可转动的设置于四个转动连接点。一个驱动电机,驱动电机具有一个能输出转矩的主动轮轴(26),主动轮轴同轴连接于主动轮且能够带动主动轮转动。一条履带,其具有一个封闭的内传动面。一个高度调节电机,具有一个能输出转矩的输出轴,输出轴的轴线
传感器组件、底盘及机器人.pdf
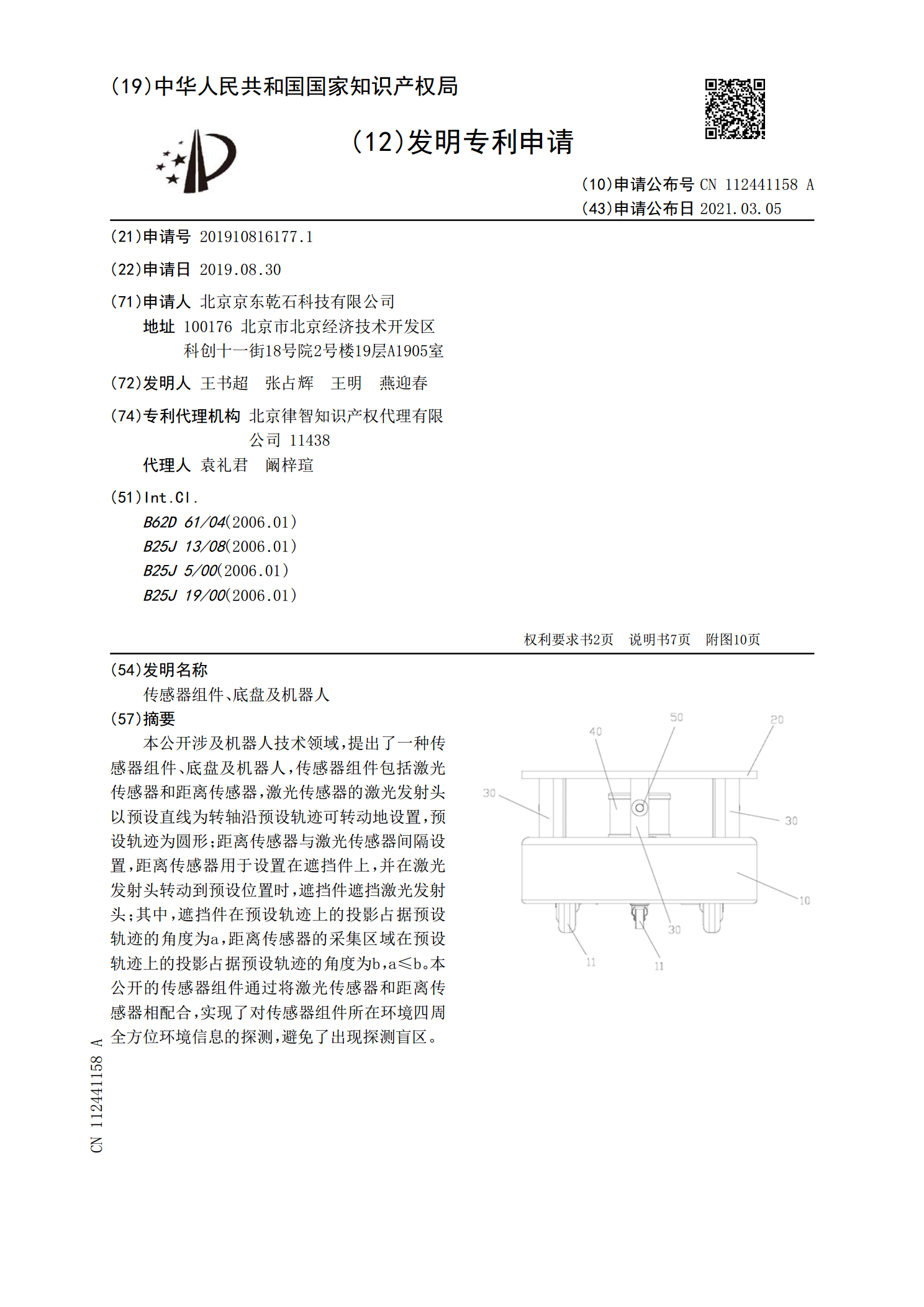
本公开涉及机器人技术领域,提出了一种传感器组件、底盘及机器人,传感器组件包括激光传感器和距离传感器,激光传感器的激光发射头以预设直线为转轴沿预设轨迹可转动地设置,预设轨迹为圆形;距离传感器与激光传感器间隔设置,距离传感器用于设置在遮挡件上,并在激光发射头转动到预设位置时,遮挡件遮挡激光发射头;其中,遮挡件在预设轨迹上的投影占据预设轨迹的角度为a,距离传感器的采集区域在预设轨迹上的投影占据预设轨迹的角度为b,a≤b。本公开的传感器组件通过将激光传感器和距离传感器相配合,实现了对传感器组件所在环境四周全方位环
机器人底盘和机器人.pdf
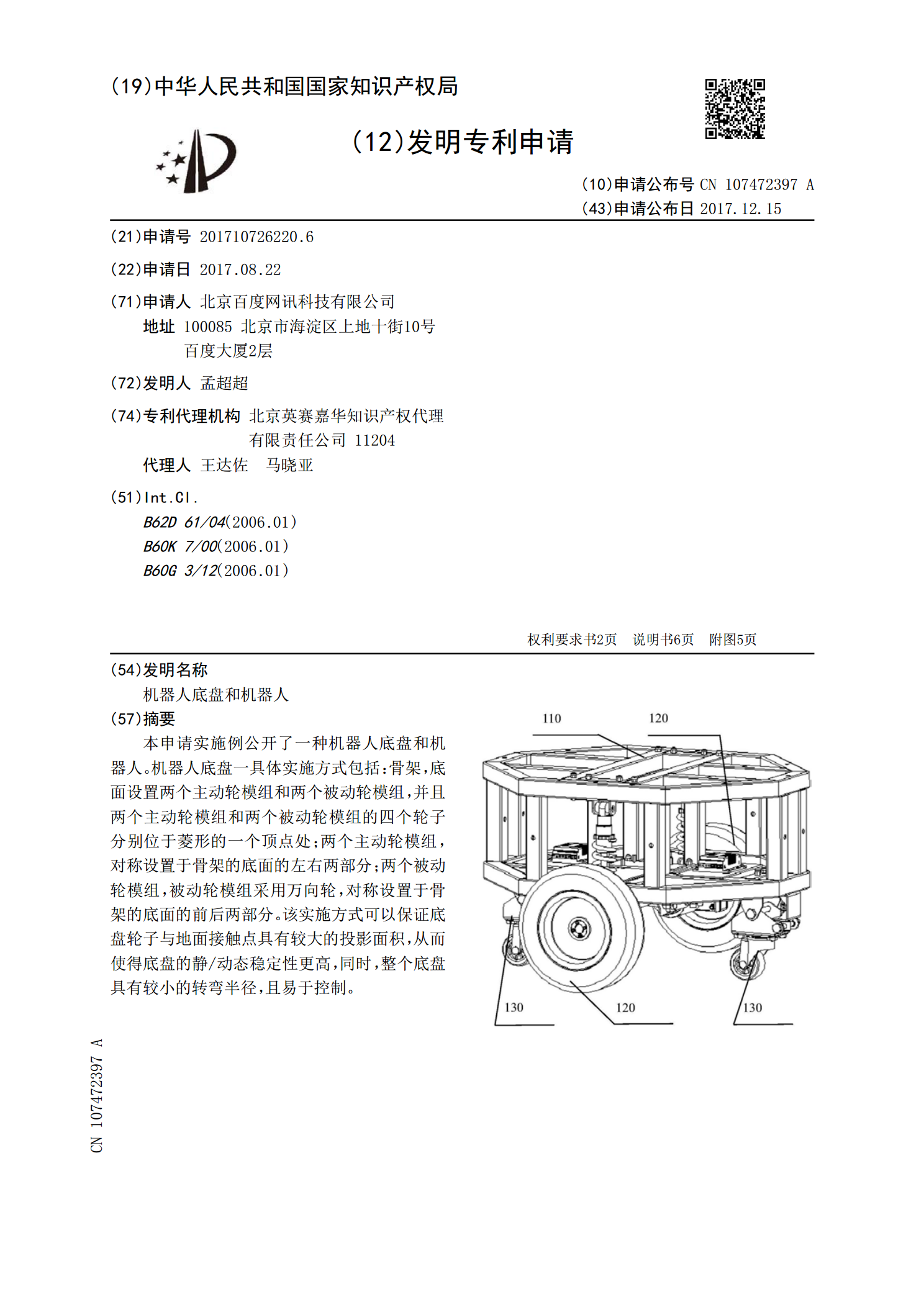
本申请实施例公开了一种机器人底盘和机器人。机器人底盘一具体实施方式包括:骨架,底面设置两个主动轮模组和两个被动轮模组,并且两个主动轮模组和两个被动轮模组的四个轮子分别位于菱形的一个顶点处;两个主动轮模组,对称设置于骨架的底面的左右两部分;两个被动轮模组,被动轮模组采用万向轮,对称设置于骨架的底面的前后两部分。该实施方式可以保证底盘轮子与地面接触点具有较大的投影面积,从而使得底盘的静/动态稳定性更高,同时,整个底盘具有较小的转弯半径,且易于控制。
机器人底盘和机器人.pdf
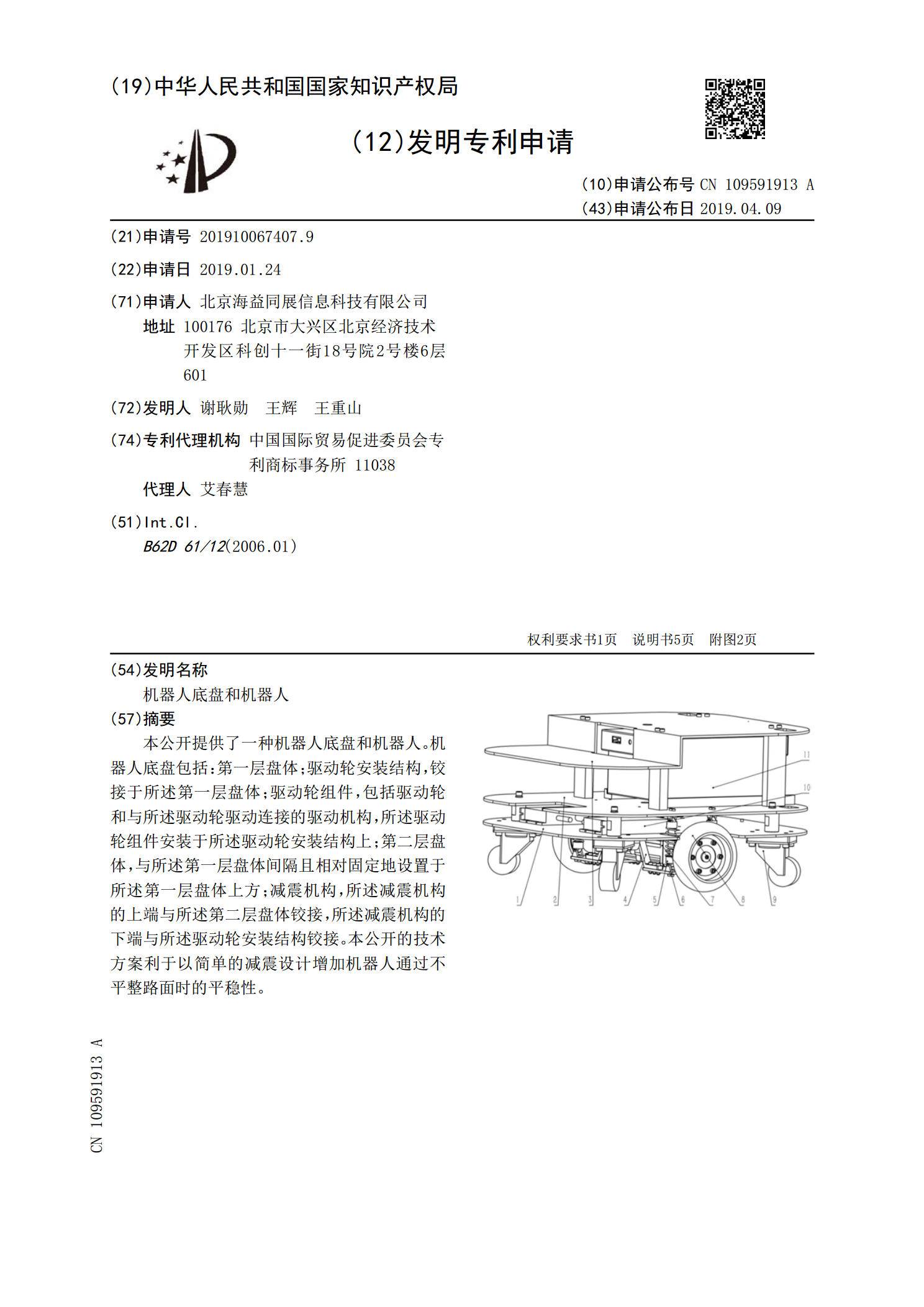
本公开提供了一种机器人底盘和机器人。机器人底盘包括:第一层盘体;驱动轮安装结构,铰接于所述第一层盘体;驱动轮组件,包括驱动轮和与所述驱动轮驱动连接的驱动机构,所述驱动轮组件安装于所述驱动轮安装结构上;第二层盘体,与所述第一层盘体间隔且相对固定地设置于所述第一层盘体上方;减震机构,所述减震机构的上端与所述第二层盘体铰接,所述减震机构的下端与所述驱动轮安装结构铰接。本公开的技术方案利于以简单的减震设计增加机器人通过不平整路面时的平稳性。