
机器人底盘和机器人.pdf

春景****23

1/9
2/9
3/9

4/9
5/9

6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
机器人底盘和机器人.pdf
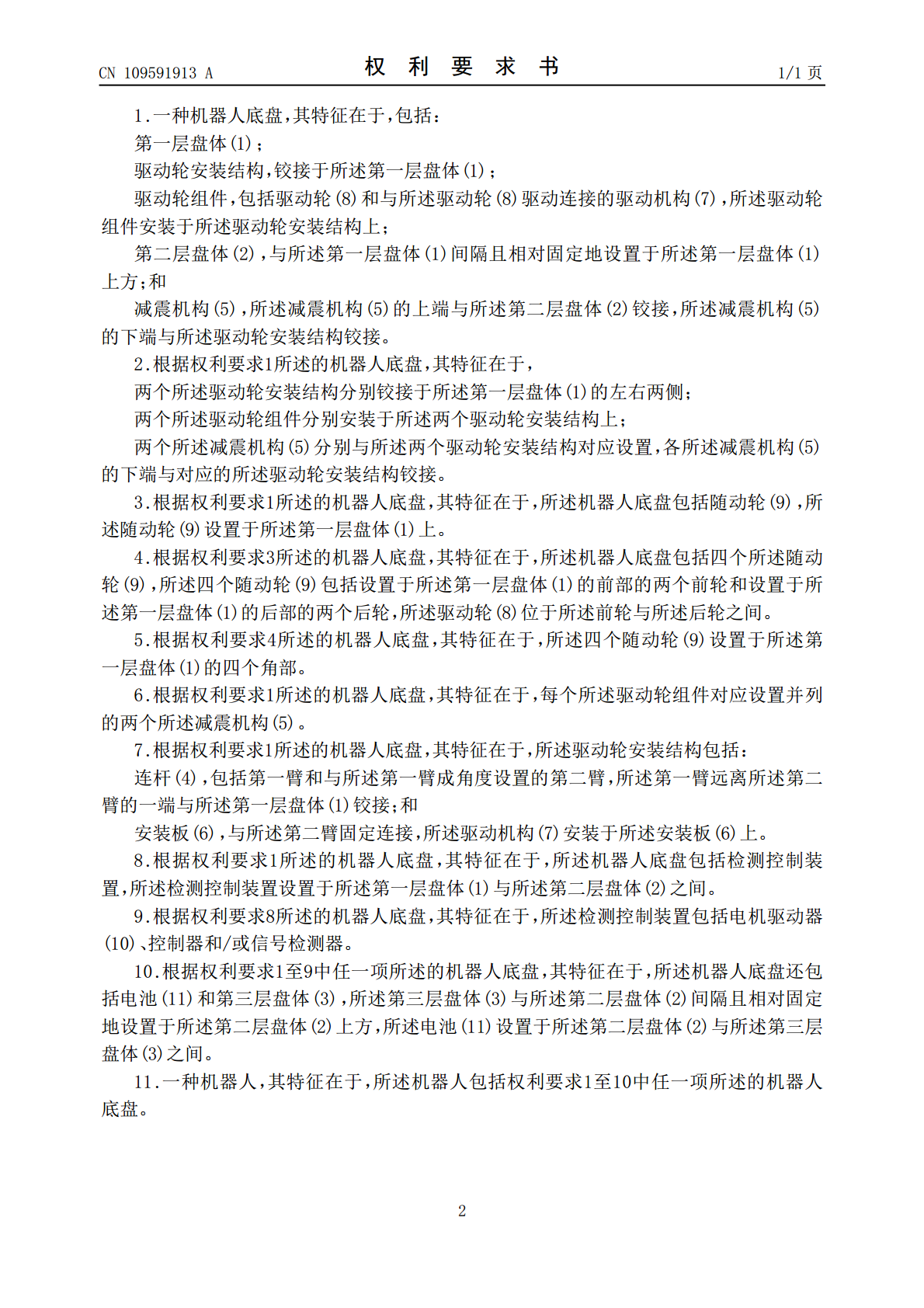
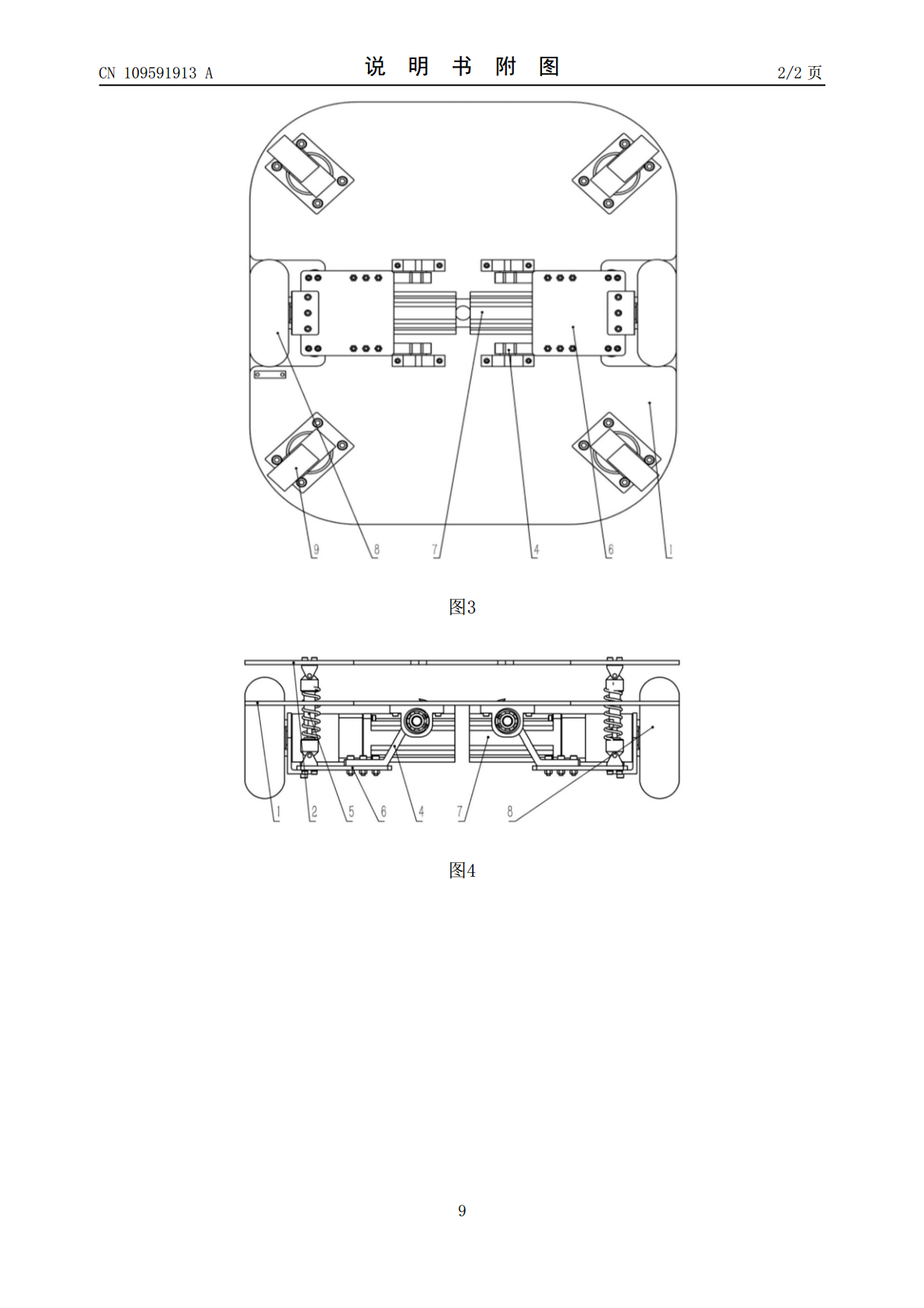
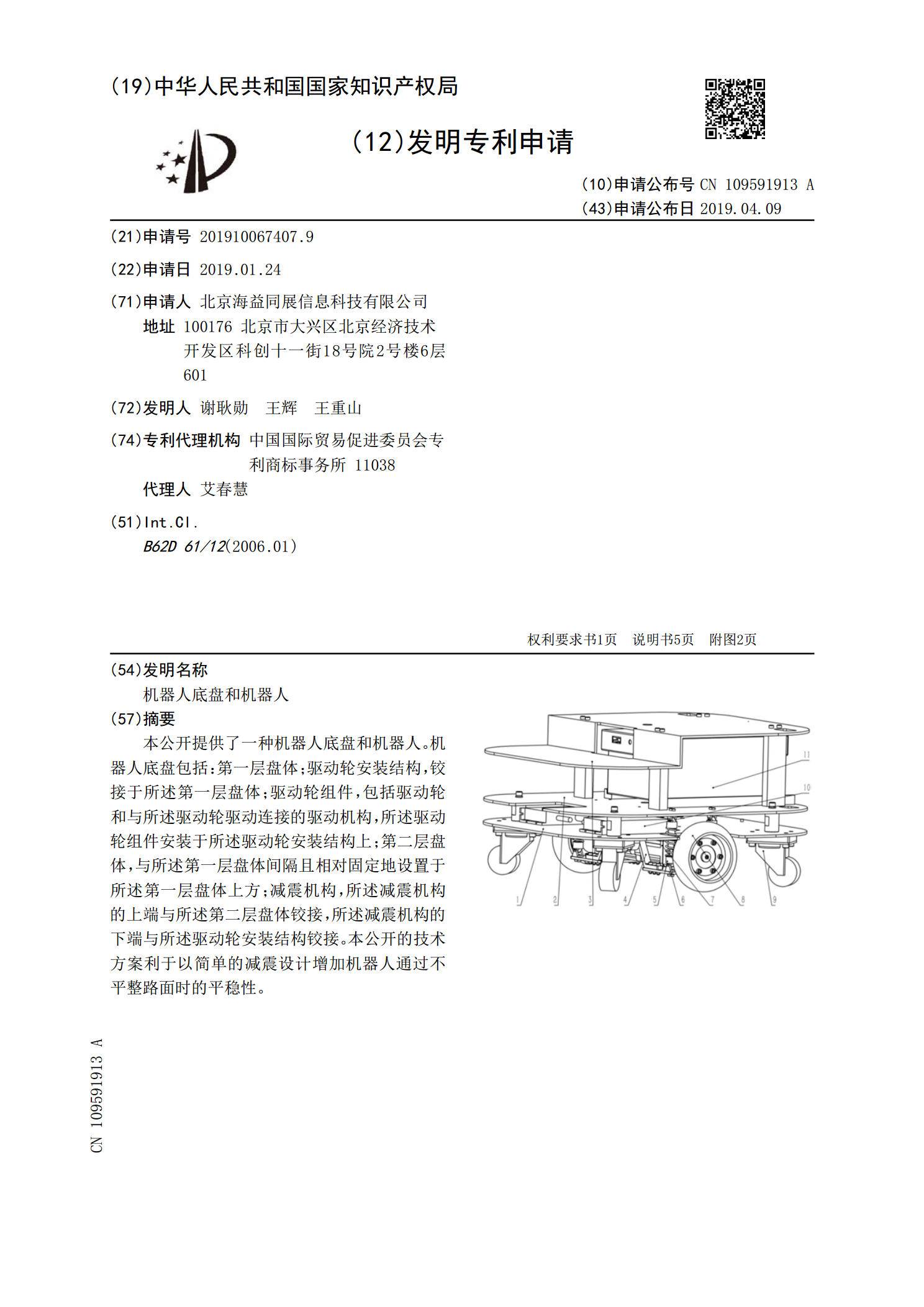
本公开提供了一种机器人底盘和机器人。机器人底盘包括:第一层盘体;驱动轮安装结构,铰接于所述第一层盘体;驱动轮组件,包括驱动轮和与所述驱动轮驱动连接的驱动机构,所述驱动轮组件安装于所述驱动轮安装结构上;第二层盘体,与所述第一层盘体间隔且相对固定地设置于所述第一层盘体上方;减震机构,所述减震机构的上端与所述第二层盘体铰接,所述减震机构的下端与所述驱动轮安装结构铰接。本公开的技术方案利于以简单的减震设计增加机器人通过不平整路面时的平稳性。
机器人底盘和机器人.pdf
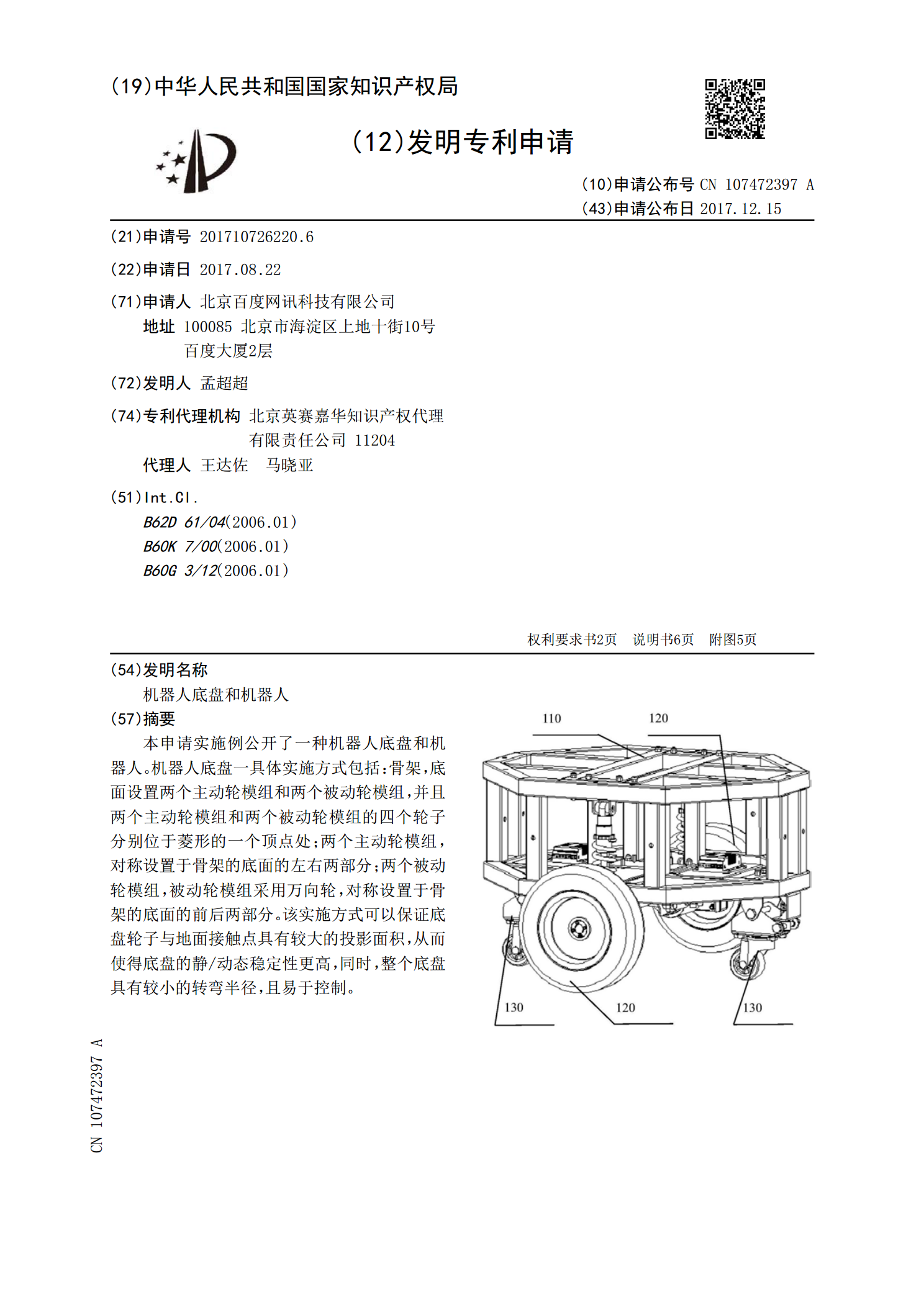
本申请实施例公开了一种机器人底盘和机器人。机器人底盘一具体实施方式包括:骨架,底面设置两个主动轮模组和两个被动轮模组,并且两个主动轮模组和两个被动轮模组的四个轮子分别位于菱形的一个顶点处;两个主动轮模组,对称设置于骨架的底面的左右两部分;两个被动轮模组,被动轮模组采用万向轮,对称设置于骨架的底面的前后两部分。该实施方式可以保证底盘轮子与地面接触点具有较大的投影面积,从而使得底盘的静/动态稳定性更高,同时,整个底盘具有较小的转弯半径,且易于控制。
机器人底盘和机器人.pdf
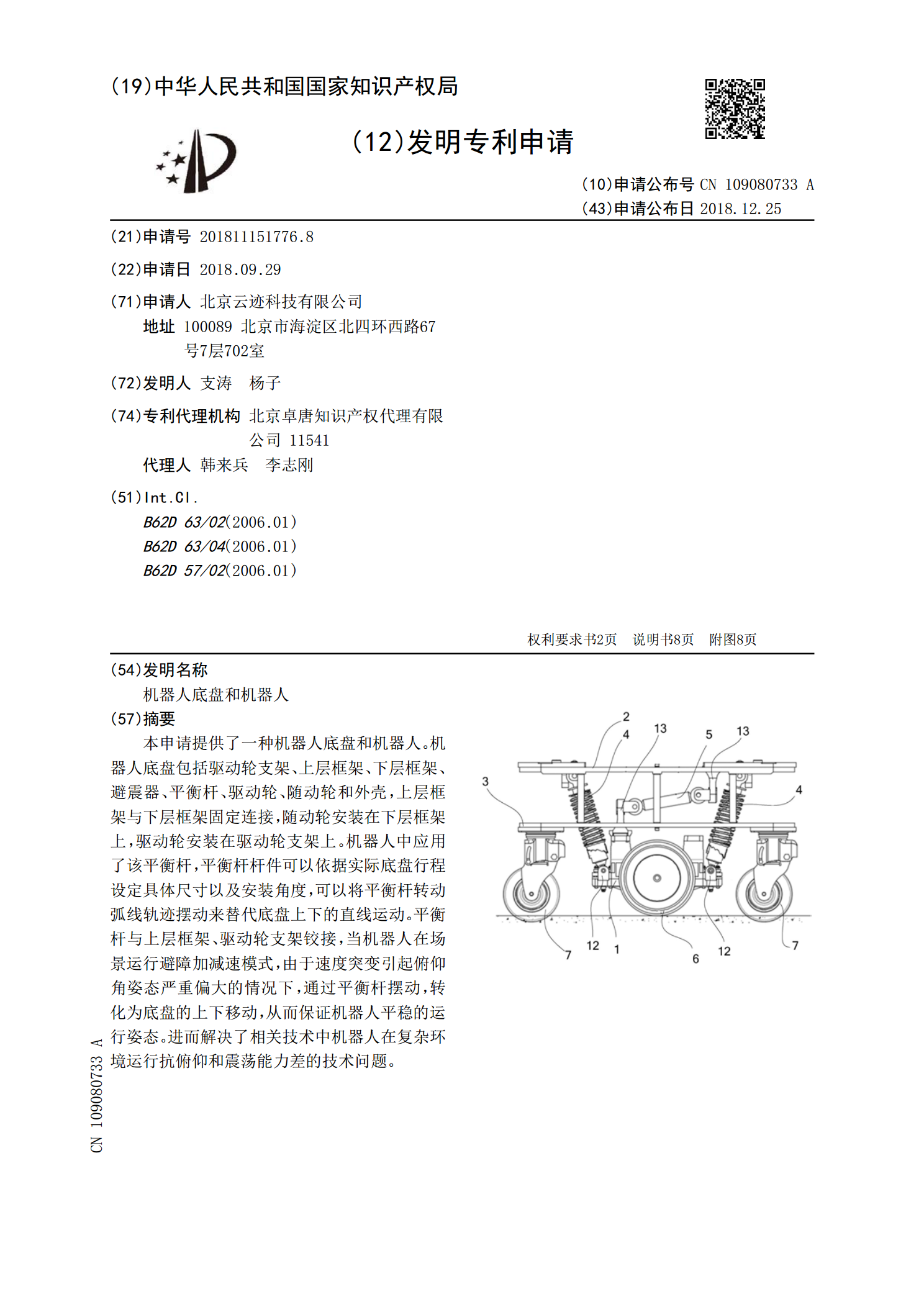
本申请提供了一种机器人底盘和机器人。机器人底盘包括驱动轮支架、上层框架、下层框架、避震器、平衡杆、驱动轮、随动轮和外壳,上层框架与下层框架固定连接,随动轮安装在下层框架上,驱动轮安装在驱动轮支架上。机器人中应用了该平衡杆,平衡杆杆件可以依据实际底盘行程设定具体尺寸以及安装角度,可以将平衡杆转动弧线轨迹摆动来替代底盘上下的直线运动。平衡杆与上层框架、驱动轮支架铰接,当机器人在场景运行避障加减速模式,由于速度突变引起俯仰角姿态严重偏大的情况下,通过平衡杆摆动,转化为底盘的上下移动,从而保证机器人平稳的运行姿态
底盘和机器人.pdf
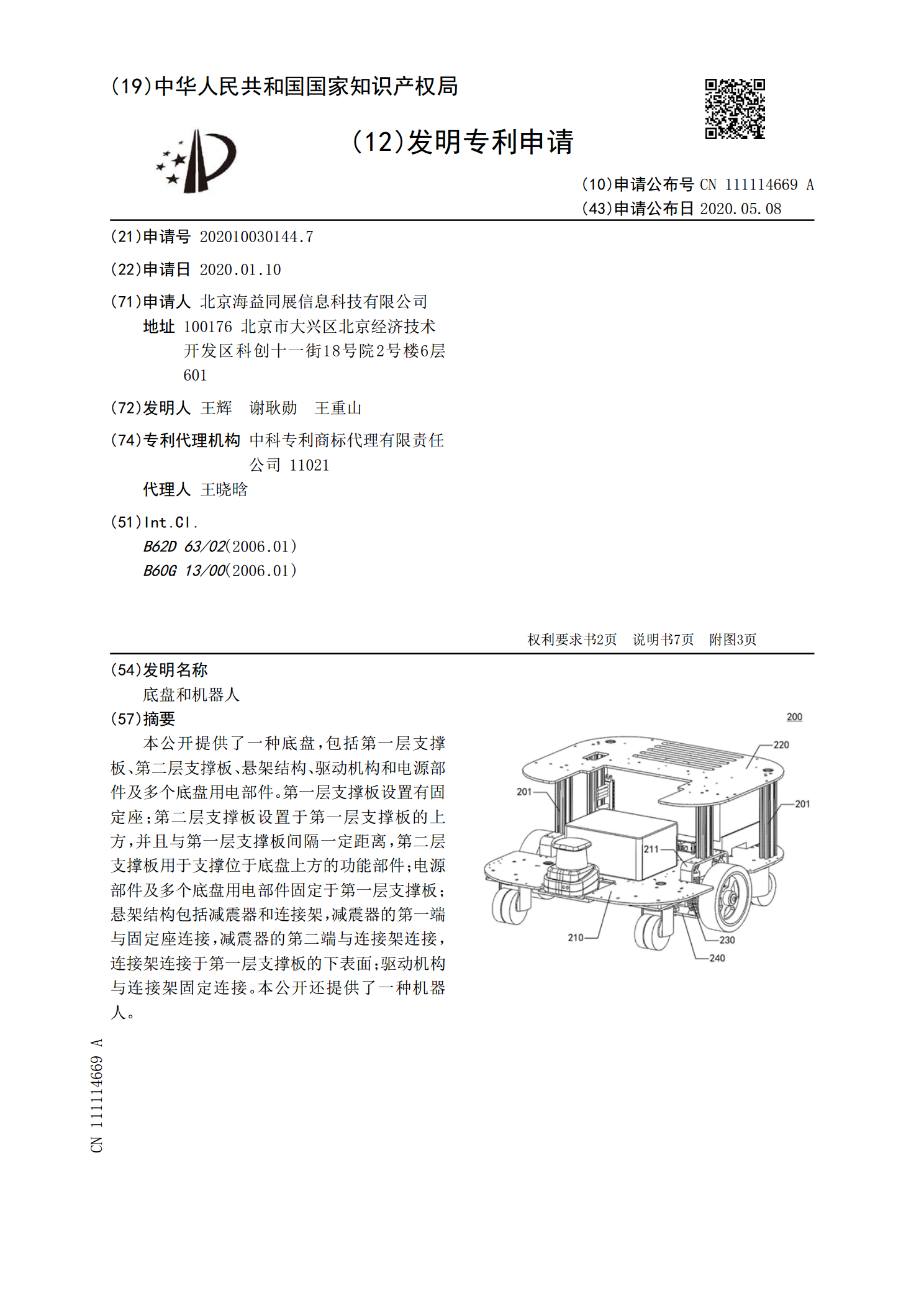
本公开提供了一种底盘,包括第一层支撑板、第二层支撑板、悬架结构、驱动机构和电源部件及多个底盘用电部件。第一层支撑板设置有固定座;第二层支撑板设置于第一层支撑板的上方,并且与第一层支撑板间隔一定距离,第二层支撑板用于支撑位于底盘上方的功能部件;电源部件及多个底盘用电部件固定于第一层支撑板;悬架结构包括减震器和连接架,减震器的第一端与固定座连接,减震器的第二端与连接架连接,连接架连接于第一层支撑板的下表面;驱动机构与连接架固定连接。本公开还提供了一种机器人。
悬架避震器、机器人底盘和机器人.pdf
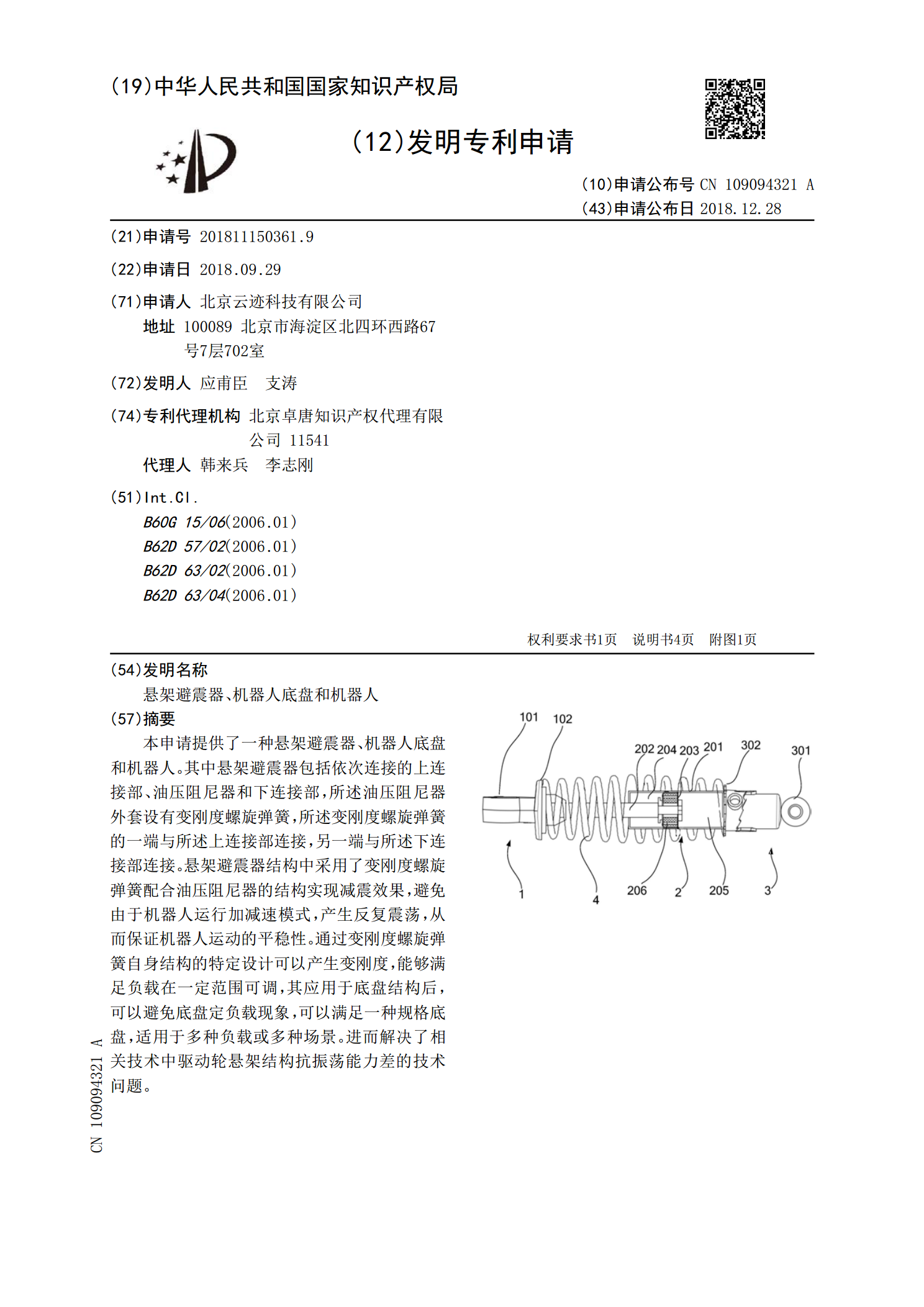
本申请提供了一种悬架避震器、机器人底盘和机器人。其中悬架避震器包括依次连接的上连接部、油压阻尼器和下连接部,所述油压阻尼器外套设有变刚度螺旋弹簧,所述变刚度螺旋弹簧的一端与所述上连接部连接,另一端与所述下连接部连接。悬架避震器结构中采用了变刚度螺旋弹簧配合油压阻尼器的结构实现减震效果,避免由于机器人运行加减速模式,产生反复震荡,从而保证机器人运动的平稳性。通过变刚度螺旋弹簧自身结构的特定设计可以产生变刚度,能够满足负载在一定范围可调,其应用于底盘结构后,可以避免底盘定负载现象,可以满足一种规格底盘,适用于