
履带底盘组件及机器人.pdf

雨巷****凝海


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
履带底盘组件及机器人.pdf
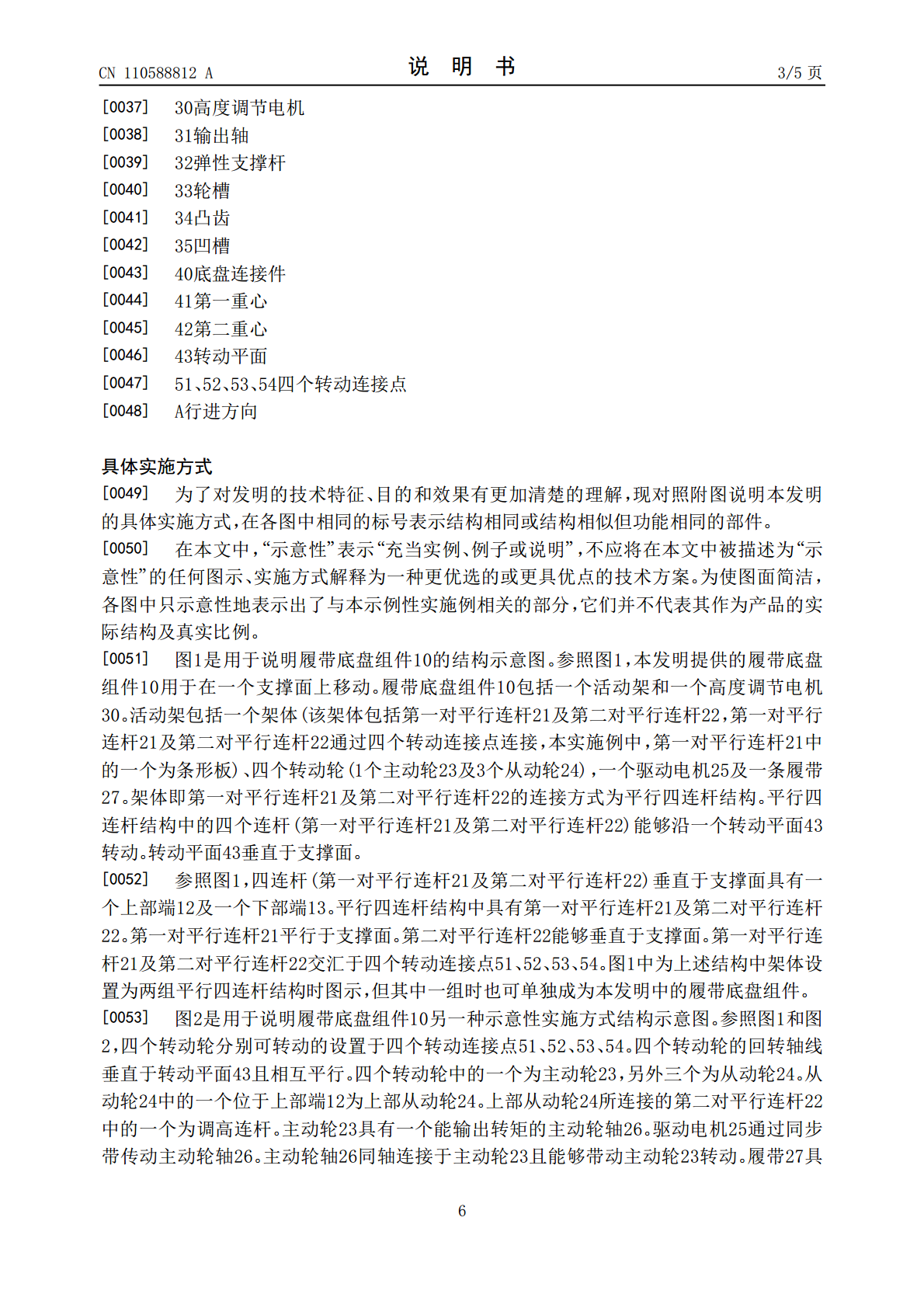
履带底盘组件(10),其用于在一个支撑面上移动。履带底盘组件(10)包括一个活动架和一个高度调节电机(30)。活动架包括一个架体、四个转动轮、一个驱动电机(25)及一条履带(27)。架体为平行四连杆结构,平行四连杆结构中的四个连杆能够沿一个转动平面(43)转动。四个转动轮,其分别可转动的设置于四个转动连接点。一个驱动电机,驱动电机具有一个能输出转矩的主动轮轴(26),主动轮轴同轴连接于主动轮且能够带动主动轮转动。一条履带,其具有一个封闭的内传动面。一个高度调节电机,具有一个能输出转矩的输出轴,输出轴的轴线

底盘组件以及用于组件的履带链节.pdf
用于移动机器(100)的底盘组件(116)包括具有多个相配合的履带链节(122)的连续履带(120),该连续履带可相对于机器(100)平移。各履带链节(122)可包括履带板部分(150)以及主体部分(160)。主体部分(160)包括多个凸起销凸耳(160),其中各销凸耳具有用于接纳销并将相邻履带链节(122)连接在一起的销孔(168)。销凸耳(160)可包括一对用于与链轮(142)滚动接触的链轮凸耳(190)、一对用于与多个滚轮(140)滚动接触的滚轮凸耳(200)以及具有用以辅助对齐多个滚轮(140)的

履带机器人底盘.pdf
本发明涉及一种履带机器人底盘,左从动轮(3)和左主动轮(9)安装在左固定架(5)上,左履带(1)安装在左从动轮(3)和左主动轮(9)外侧,右从动轮(4)和右主动轮(8)安装在右固定架(6)上,右履带(2)安装在右从动轮(4)和右主动轮(8)外侧,左固定架(5)与右固定架(6)通过连接板(7)固定连接,右轮减速驱动(10)驱动右主动轮(8)转动,左轮减速驱动(11)驱动左主动轮(9)转动。

履带组件及履带式机器人.pdf
本发明适用于机器人技术领域,提供了一种履带组件,该履带组件包括第一张紧机构和第二张紧机构,第一张紧机构可以调节链条第一方向上的张紧力度,第二张紧机构可以调节链条第二方向上的张紧力度,当履带式机器人在第一方向上没有为链条预留足够的张紧空间时,可以通过第二张紧机构从第二方向对链条进行张紧;也可以利用第一张紧机构提供一定的张紧量,第二张紧机构提供剩余的张紧量,利用两个张紧量的加和来满足链条的张紧。本发明提供的履带组件当第一张紧机构没有足够的空间对链条进行完全张紧时,可以通过第二张紧机构进行张紧,因此,可以适应更

站立-倾倒变形履带机器人底盘.pdf
本发明揭示了一种站立‑倾倒变形履带机器人底盘,其主体结构由底盘主体以及左侧履带架总成、右侧履带架总成以及安装在其上的履带组成;所述的左侧履带架总成包含左侧履带架、左侧核心杆、左连杆、左支撑杆、左支撑轮、左侧副车架、左前轮、左后轮、左主动轮;所述的右侧履带架总成包含右侧履带架、右侧核心杆、右连杆、右支撑杆、右支撑轮、右侧副车架、右前轮、右后轮、右主动轮;所述的左侧履带架总成、右侧履带架总成可将履带撑起为三角形,并同时将所述的底盘主体向上推出,抬高重心实现站立,进而倾倒,以完成越障、越沟动作。本发明可携带一定