
一种管道机器人自适应框架及其在管道内的工作方法.pdf

Ro****44

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种管道机器人自适应框架及其在管道内的工作方法.pdf
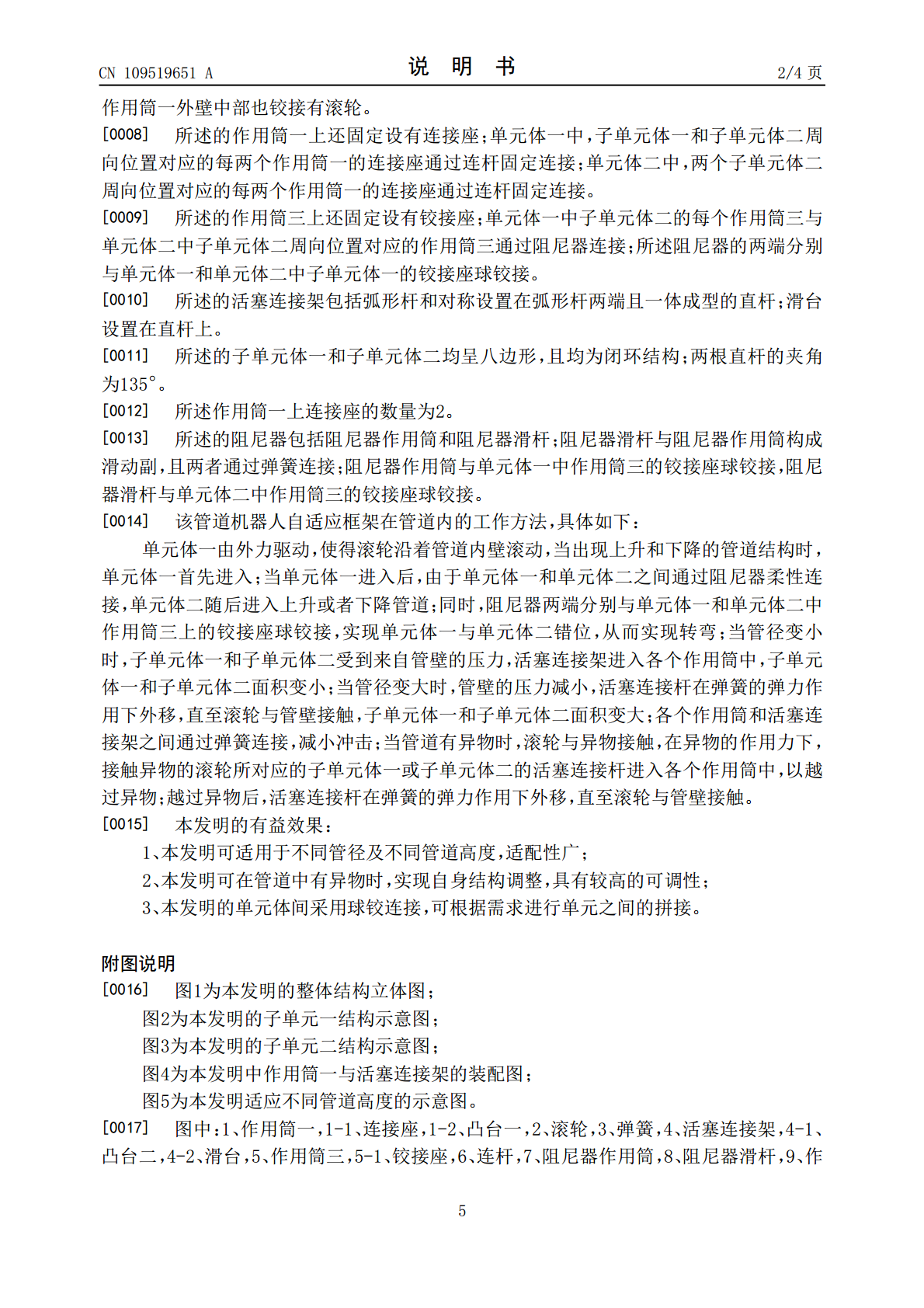
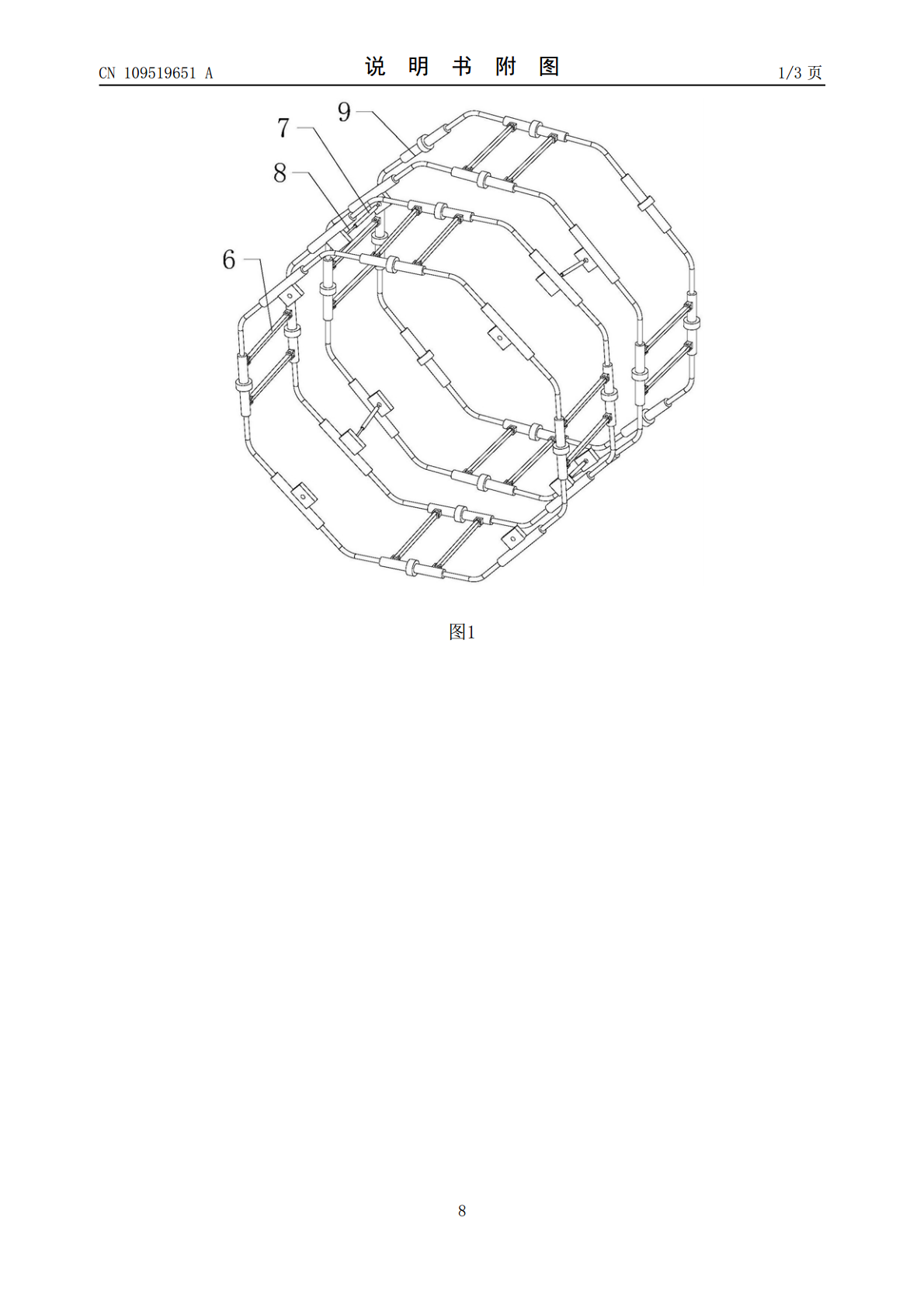
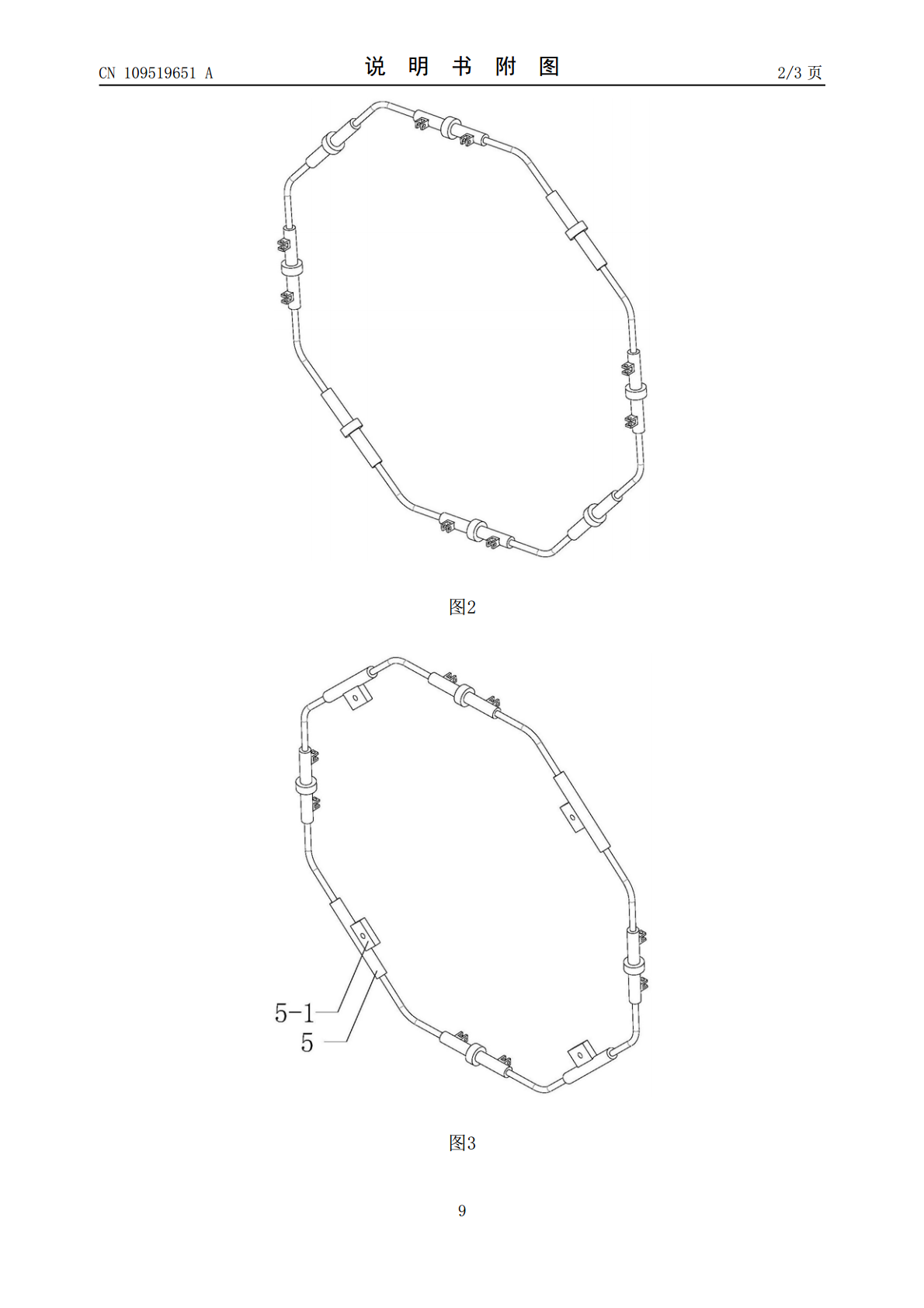
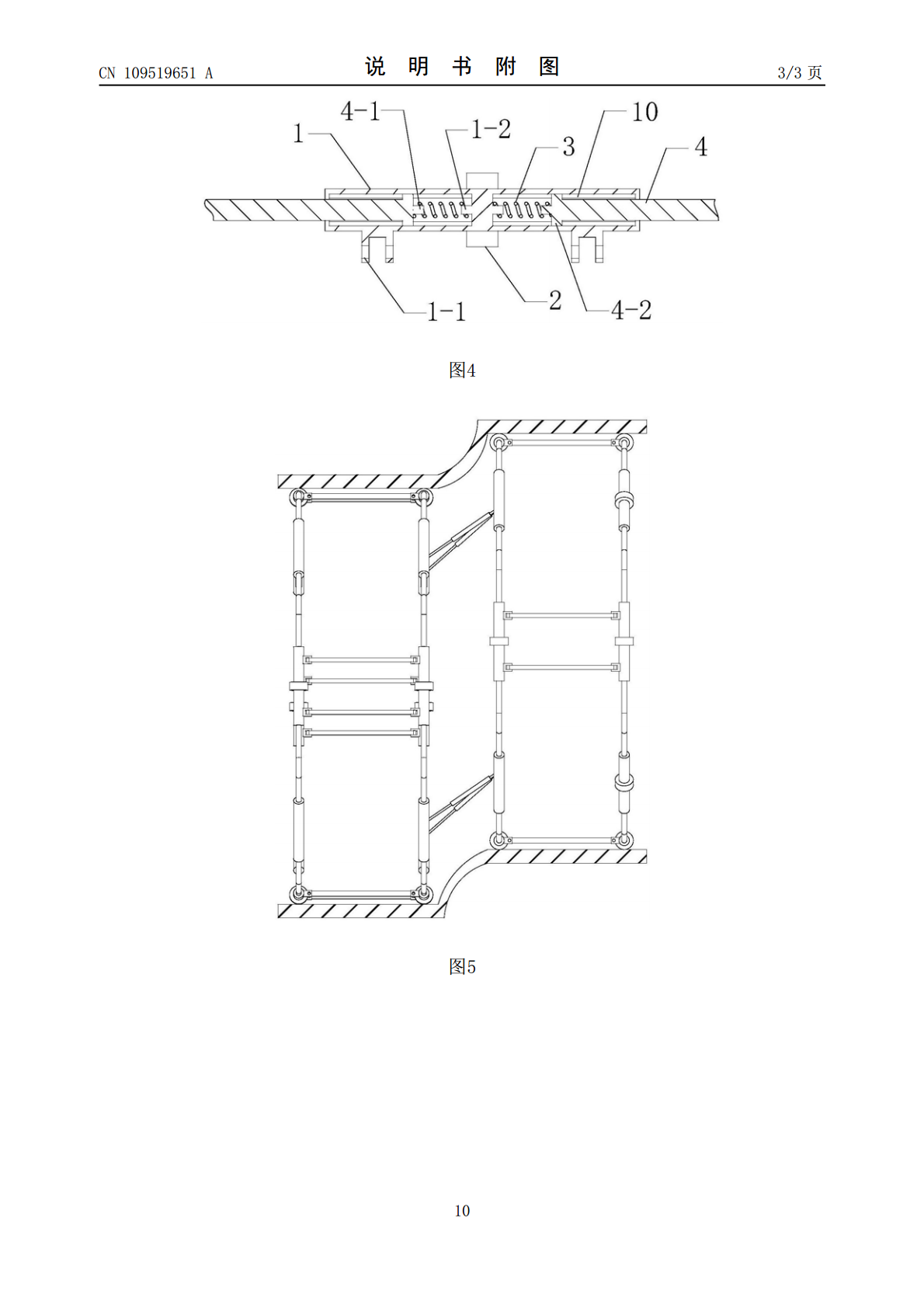
本发明公开了一种管道机器人自适应框架及其在管道内的工作方法。本发明中单元体一包括子单元体一和子单元体二,单元体二由两个子单元体二组成;子单元体一包括作用筒一和作用筒二;子单元体二包括作用筒一和作用筒三;作用筒一和作用筒二以及作用筒一和作用筒三均通过活塞连接架连接,且活塞连接架与作用筒一、作用筒二和作用筒三之间均连接有弹簧;作用筒一和作用筒二外壁均铰接有滚轮;单元体一中子单元体一和子单元体二固定;单元体二中两个子单元体二固定;单元体一中子单元体二的每个作用筒三与单元体二中子单元体二周向位置对应的作用筒三通过
自适应管径管道内窥爬行机器人.pdf
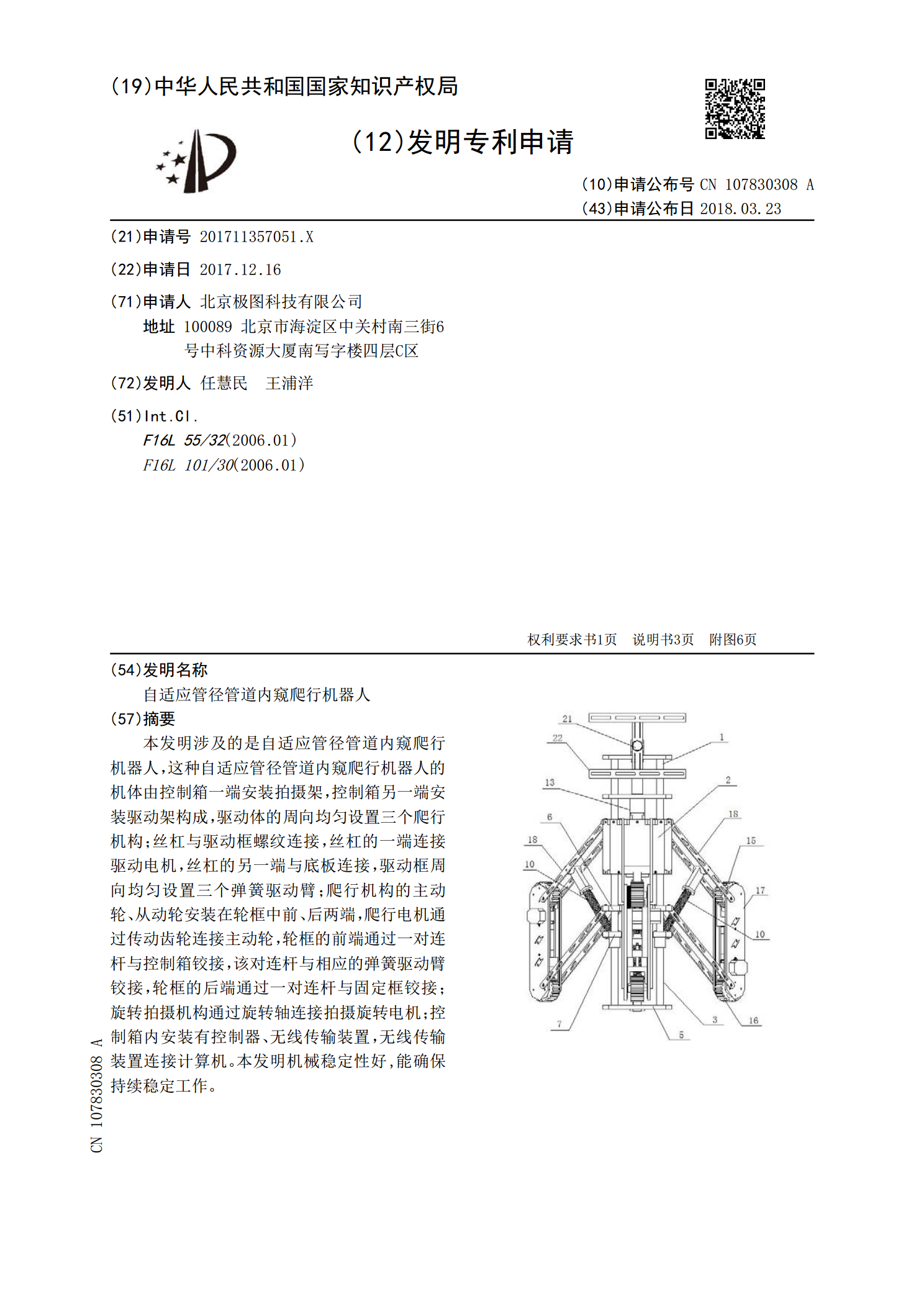
本发明涉及的是自适应管径管道内窥爬行机器人,这种自适应管径管道内窥爬行机器人的机体由控制箱一端安装拍摄架,控制箱另一端安装驱动架构成,驱动体的周向均匀设置三个爬行机构;丝杠与驱动框螺纹连接,丝杠的一端连接驱动电机,丝杠的另一端与底板连接,驱动框周向均匀设置三个弹簧驱动臂;爬行机构的主动轮、从动轮安装在轮框中前、后两端,爬行电机通过传动齿轮连接主动轮,轮框的前端通过一对连杆与控制箱铰接,该对连杆与相应的弹簧驱动臂铰接,轮框的后端通过一对连杆与固定框铰接;旋转拍摄机构通过旋转轴连接拍摄旋转电机;控制箱内安装有
一种管道自适应清淤机器人.pdf
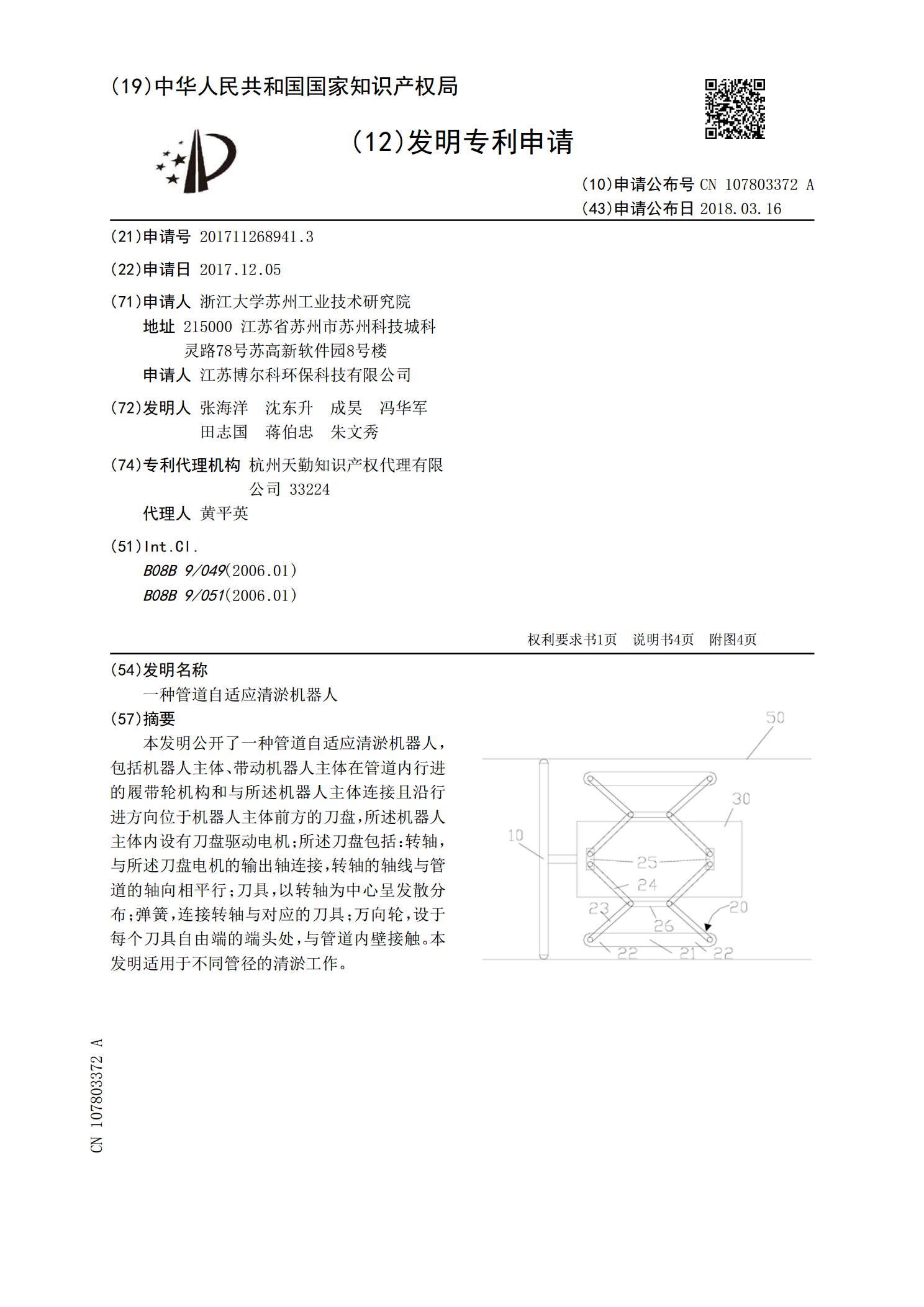
本发明公开了一种管道自适应清淤机器人,包括机器人主体、带动机器人主体在管道内行进的履带轮机构和与所述机器人主体连接且沿行进方向位于机器人主体前方的刀盘,所述机器人主体内设有刀盘驱动电机;所述刀盘包括:转轴,与所述刀盘电机的输出轴连接,转轴的轴线与管道的轴向相平行;刀具,以转轴为中心呈发散分布;弹簧,连接转轴与对应的刀具;万向轮,设于每个刀具自由端的端头处,与管道内壁接触。本发明适用于不同管径的清淤工作。
一种自适应管道清淤机器人.pdf
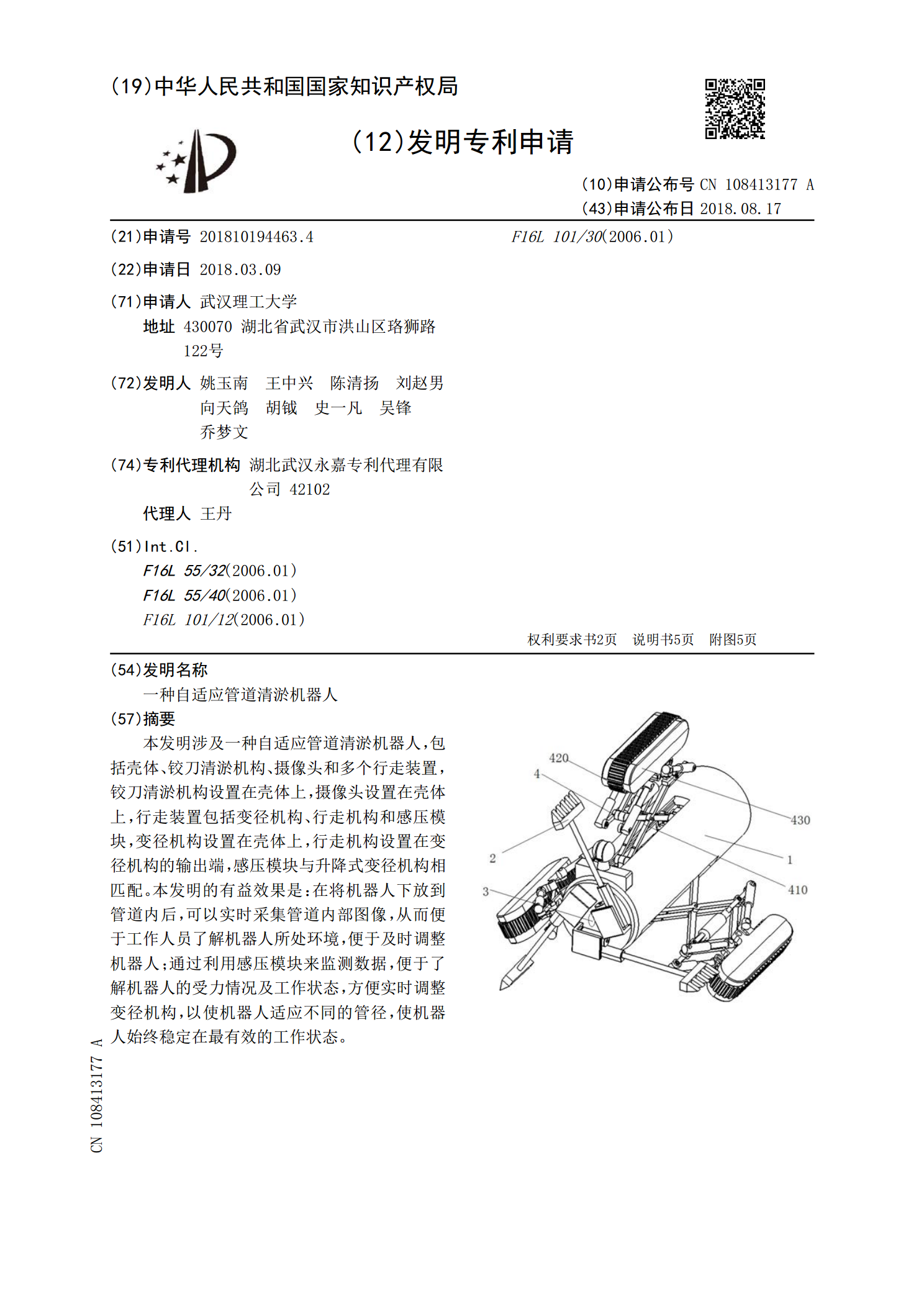
本发明涉及一种自适应管道清淤机器人,包括壳体、铰刀清淤机构、摄像头和多个行走装置,铰刀清淤机构设置在壳体上,摄像头设置在壳体上,行走装置包括变径机构、行走机构和感压模块,变径机构设置在壳体上,行走机构设置在变径机构的输出端,感压模块与升降式变径机构相匹配。本发明的有益效果是:在将机器人下放到管道内后,可以实时采集管道内部图像,从而便于工作人员了解机器人所处环境,便于及时调整机器人;通过利用感压模块来监测数据,便于了解机器人的受力情况及工作状态,方便实时调整变径机构,以使机器人适应不同的管径,使机器人始终稳

一种管道式智能喷涂机器人及其工作方法.pdf
本发明公开了一种管道式智能喷涂机器人及其工作方法,属于智能制造喷涂领域,一种管道式智能喷涂机器人,包括机架、多轮驱动单元和预紧变径机构三部分。通过在机架本体上面设置三个多轮驱动单元,且所述驱动轮呈120°分布,同时将驱动电机和驱动轮固定在同一支架上,简化了驱动单元,节省了设计空间。为了有效避免驱动轮打滑的现象,在所述驱动轮的外围包围着橡胶材料,有效的增加了静态摩擦系数,同时具有较好的弹性,同时驱动电机和驱动轮的传动方式采用同步带,在传动过程汇总保持恒定的出传动比,并且传动平稳,有一定的缓冲,减振能力,同时