
一种管道式智能喷涂机器人及其工作方法.pdf

努力****恨风

1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种管道式智能喷涂机器人及其工作方法.pdf
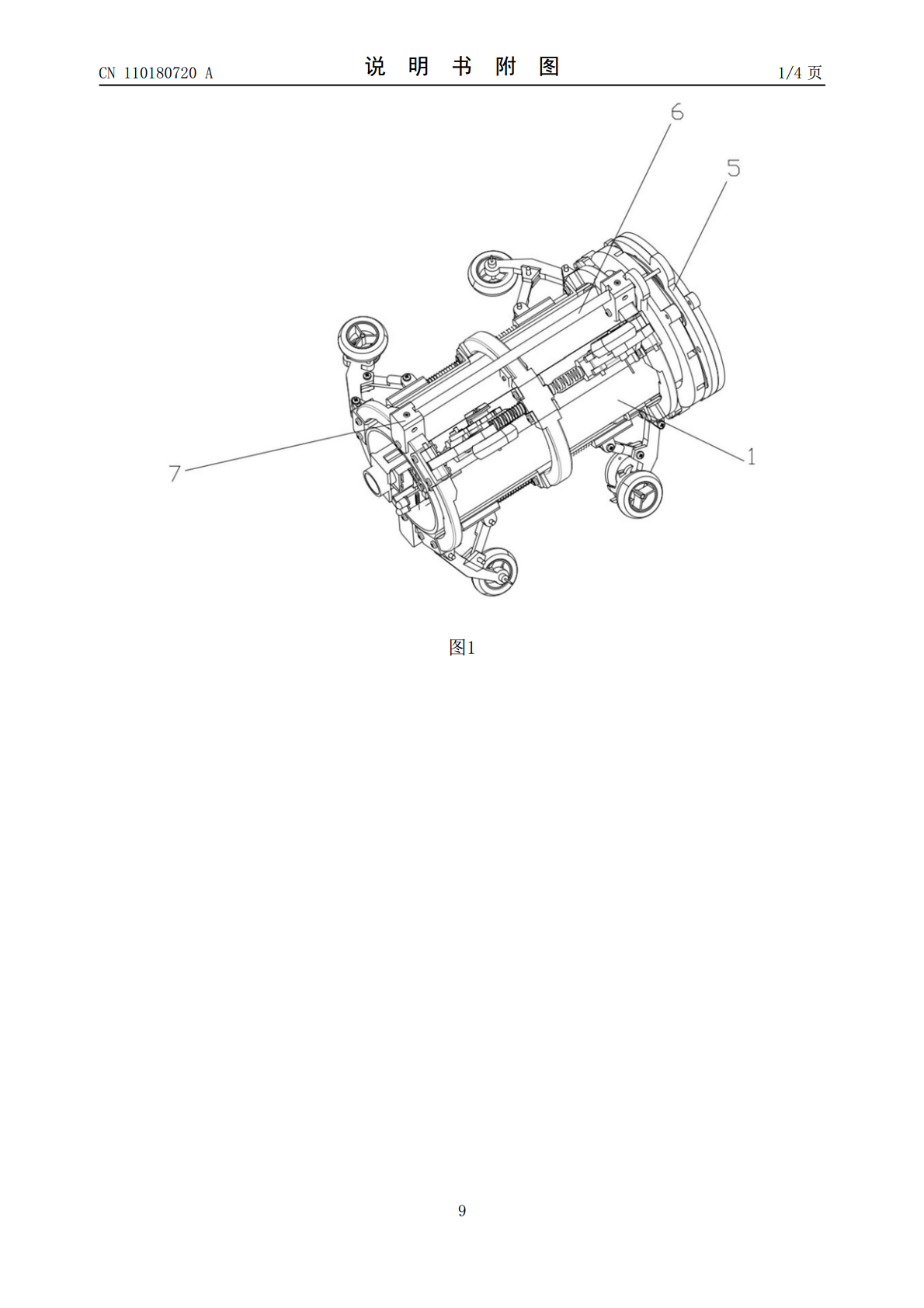
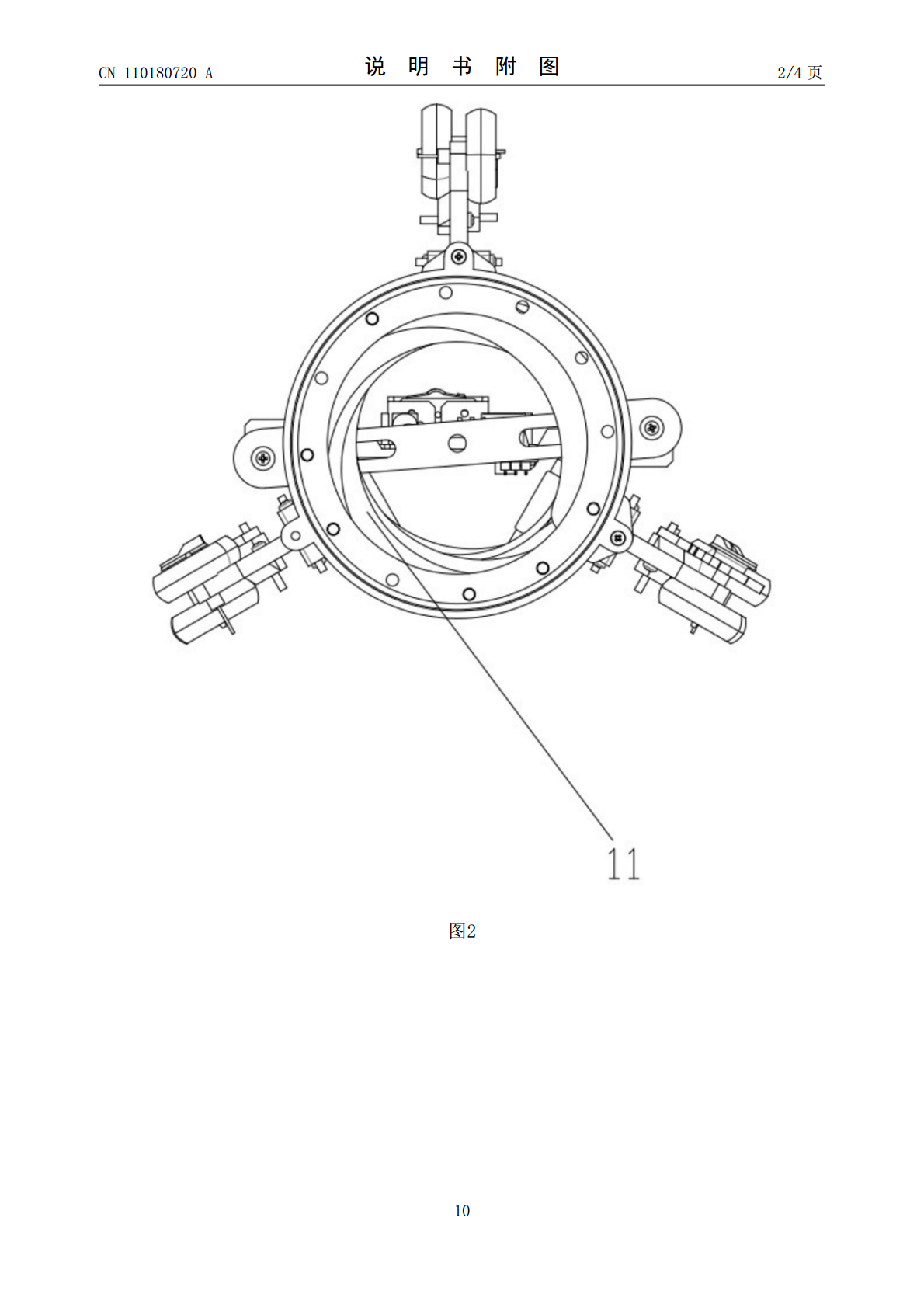
本发明公开了一种管道式智能喷涂机器人及其工作方法,属于智能制造喷涂领域,一种管道式智能喷涂机器人,包括机架、多轮驱动单元和预紧变径机构三部分。通过在机架本体上面设置三个多轮驱动单元,且所述驱动轮呈120°分布,同时将驱动电机和驱动轮固定在同一支架上,简化了驱动单元,节省了设计空间。为了有效避免驱动轮打滑的现象,在所述驱动轮的外围包围着橡胶材料,有效的增加了静态摩擦系数,同时具有较好的弹性,同时驱动电机和驱动轮的传动方式采用同步带,在传动过程汇总保持恒定的出传动比,并且传动平稳,有一定的缓冲,减振能力,同时

一种管道内除锈喷涂的智能机器人.pdf
本发明公开一种管道内除锈喷涂的智能机器人,包括控制箱、驱动机构、除锈机构、喷涂机构、电缆;所述控制箱通过电缆与驱动机构、除锈机构、喷涂机构连接;驱动机构、除锈机构、喷涂机构相互连为一体,驱动机构在前,除锈机构位于两者之间,喷涂机构位于尾部。该管道内除锈喷涂的智能机器人以微电流触觉传感焊缝捕捉定位轮精确捕捉焊缝,焊缝打磨效果好;涂层厚度均匀、无流挂缺陷出现;且结构简单,便于制造,重量轻,体积小。

一种智能仓储机器人及其工作方法.pdf
本发明公开了一种智能仓储机器人及其工作方法。该机器人包括底座,所述底座底部设有摄像头和移动机构,所述底座左右两侧设有货架爬升装置,所述底座上设有驱动货架爬升装置张开/缩回的伸缩机构,所述底座顶部设有用于抓取物品的机械臂以及带动机械臂转动的转动机构,所述货架爬升装置包括支架、位于支架前后两端的链轮以及驱动链轮转动的驱动机构,所述底座上还设有控制器和无线通信模块,所述控制器分别与摄像头、移动机构、伸缩机构、机械臂、转动机构、驱动机构和无线通信模块电连接。本发明无需搬运整个货架,成本较低,货架尺寸不受限制,提高
一种智能净化机器人及其工作方法.pdf
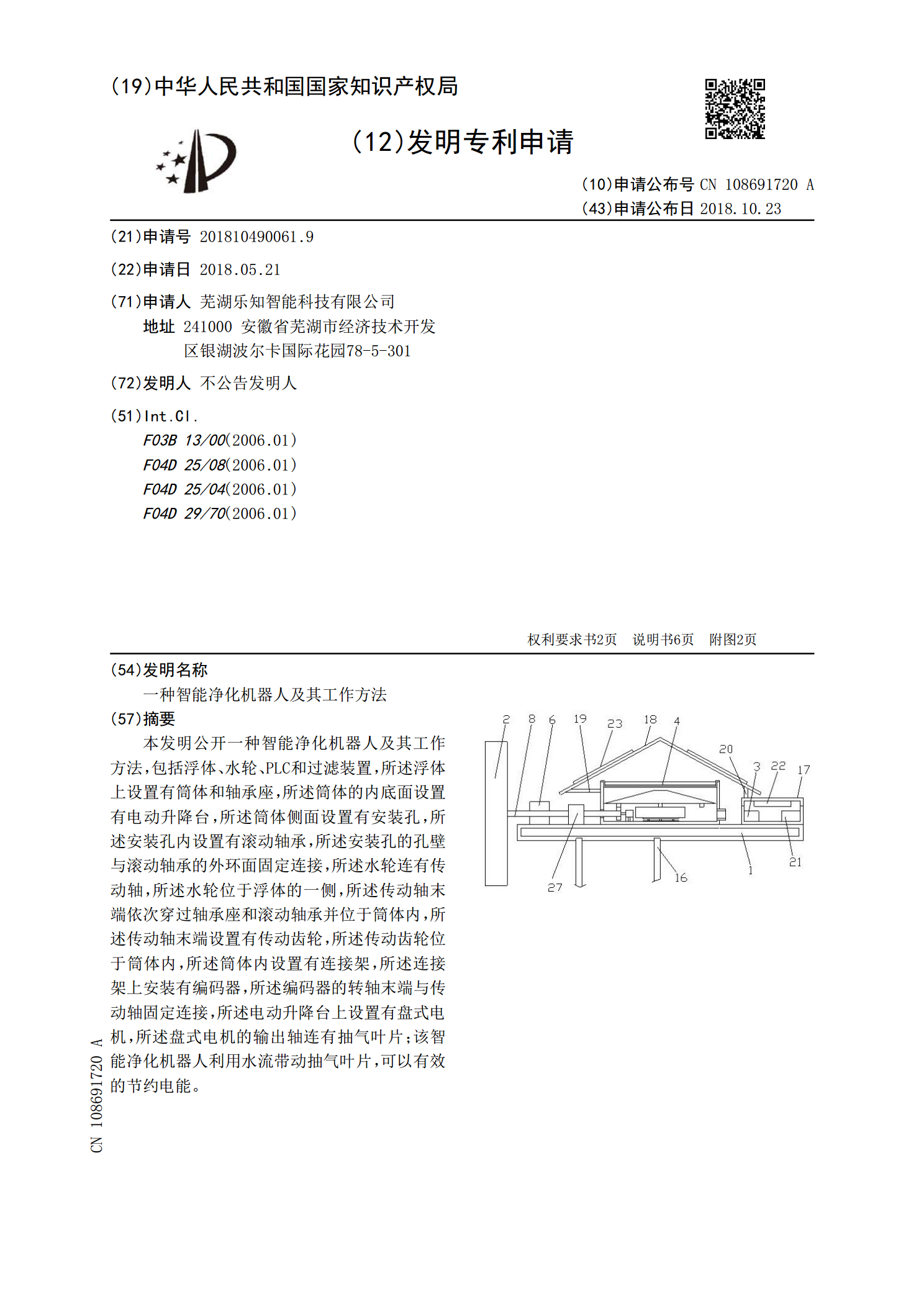
本发明公开一种智能净化机器人及其工作方法,包括浮体、水轮、PLC和过滤装置,所述浮体上设置有筒体和轴承座,所述筒体的内底面设置有电动升降台,所述筒体侧面设置有安装孔,所述安装孔内设置有滚动轴承,所述安装孔的孔壁与滚动轴承的外环面固定连接,所述水轮连有传动轴,所述水轮位于浮体的一侧,所述传动轴末端依次穿过轴承座和滚动轴承并位于筒体内,所述传动轴末端设置有传动齿轮,所述传动齿轮位于筒体内,所述筒体内设置有连接架,所述连接架上安装有编码器,所述编码器的转轴末端与传动轴固定连接,所述电动升降台上设置有盘式电机,所
一种连续式热喷涂沉积炉及其工作方法.pdf
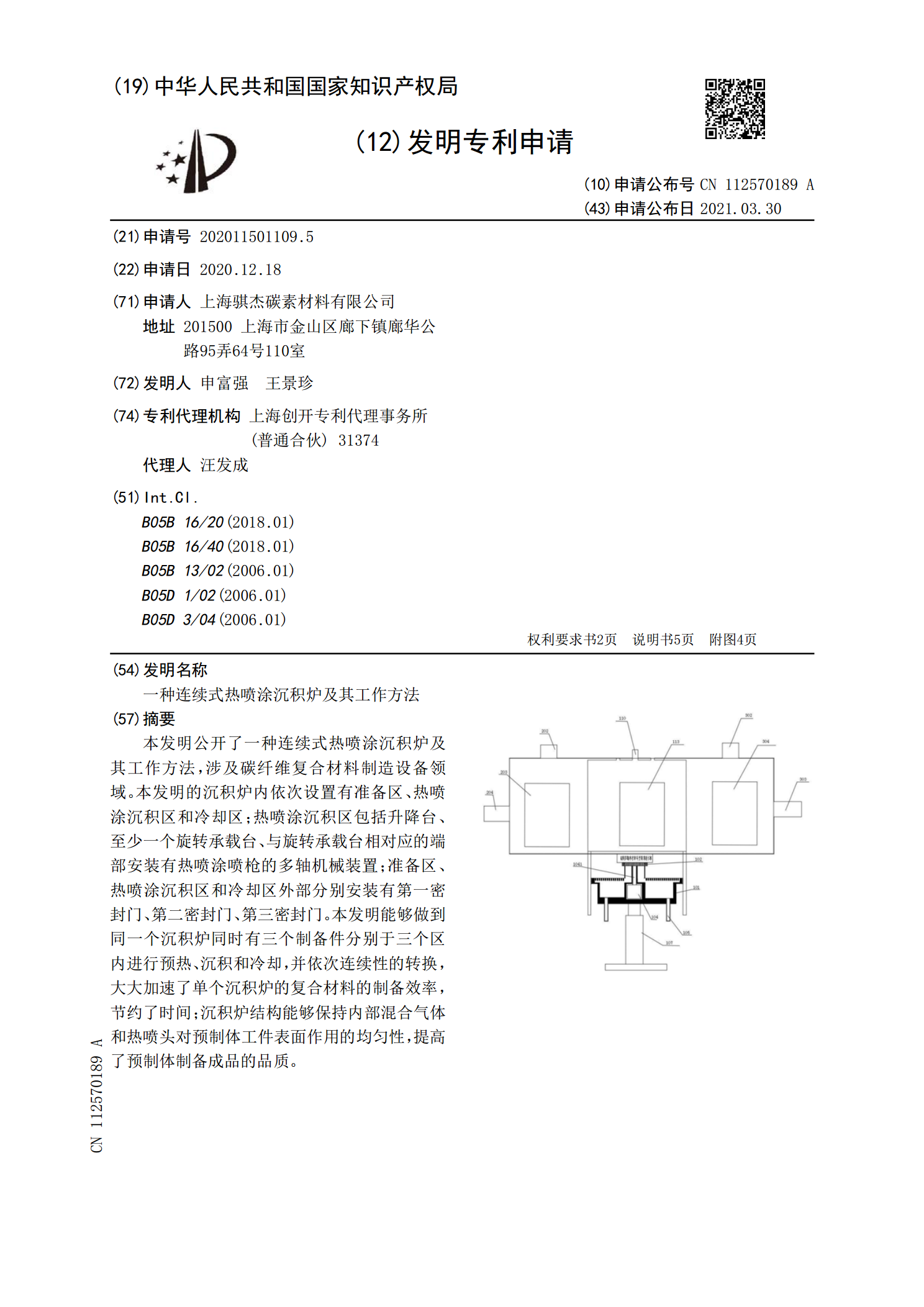
本发明公开了一种连续式热喷涂沉积炉及其工作方法,涉及碳纤维复合材料制造设备领域。本发明的沉积炉内依次设置有准备区、热喷涂沉积区和冷却区;热喷涂沉积区包括升降台、至少一个旋转承载台、与旋转承载台相对应的端部安装有热喷涂喷枪的多轴机械装置;准备区、热喷涂沉积区和冷却区外部分别安装有第一密封门、第二密封门、第三密封门。本发明能够做到同一个沉积炉同时有三个制备件分别于三个区内进行预热、沉积和冷却,并依次连续性的转换,大大加速了单个沉积炉的复合材料的制备效率,节约了时间;沉积炉结构能够保持内部混合气体和热喷头对预制