
平衡车车轮滑动的判断方法以及平衡车.pdf

雨巷****轶丽


1/10

2/10
3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
平衡车车轮滑动的判断方法以及平衡车.pdf
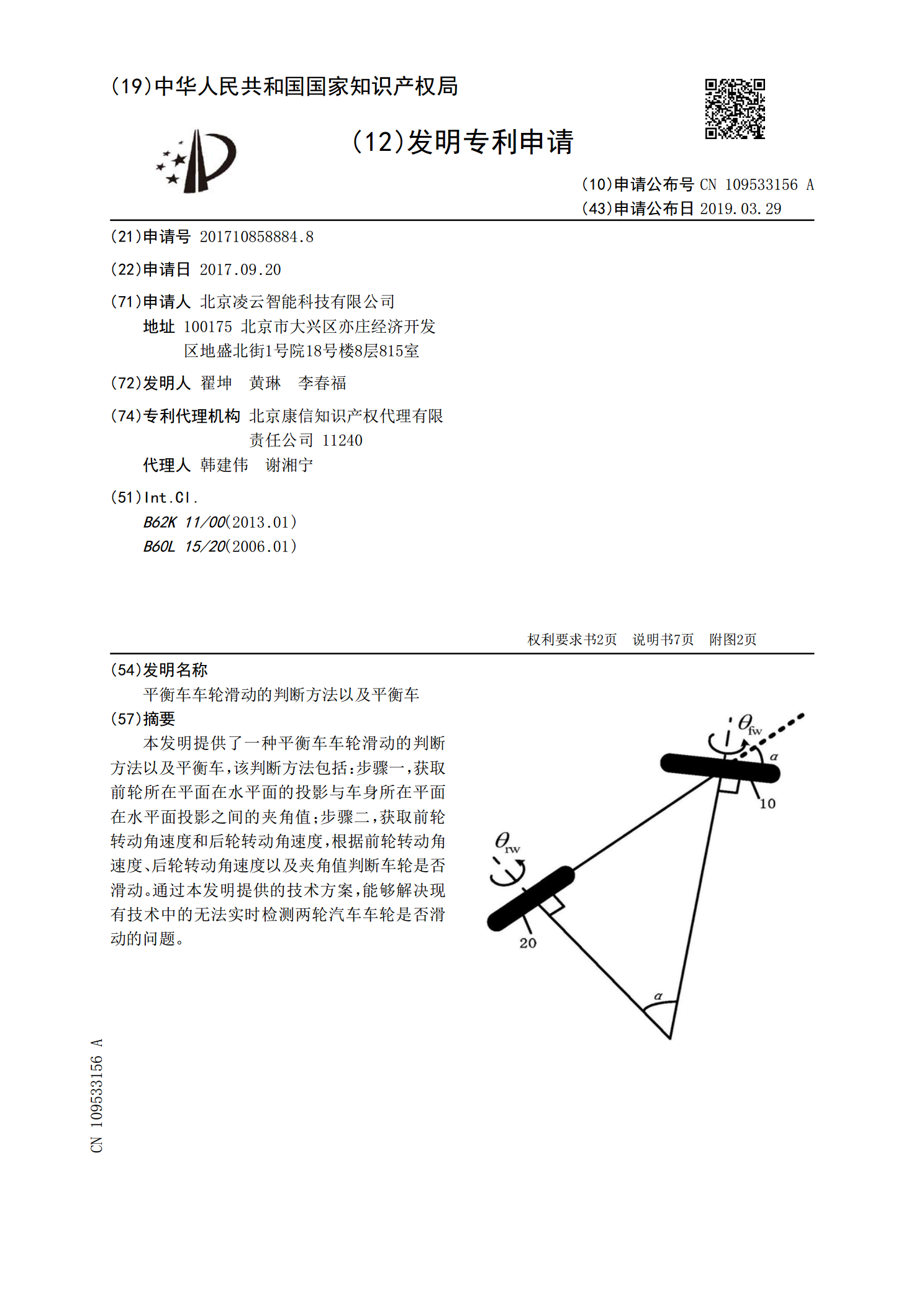
本发明提供了一种平衡车车轮滑动的判断方法以及平衡车,该判断方法包括:步骤一,获取前轮所在平面在水平面的投影与车身所在平面在水平面投影之间的夹角值;步骤二,获取前轮转动角速度和后轮转动角速度,根据前轮转动角速度、后轮转动角速度以及夹角值判断车轮是否滑动。通过本发明提供的技术方案,能够解决现有技术中的无法实时检测两轮汽车车轮是否滑动的问题。
轮毂、车轮以及平衡车.pdf
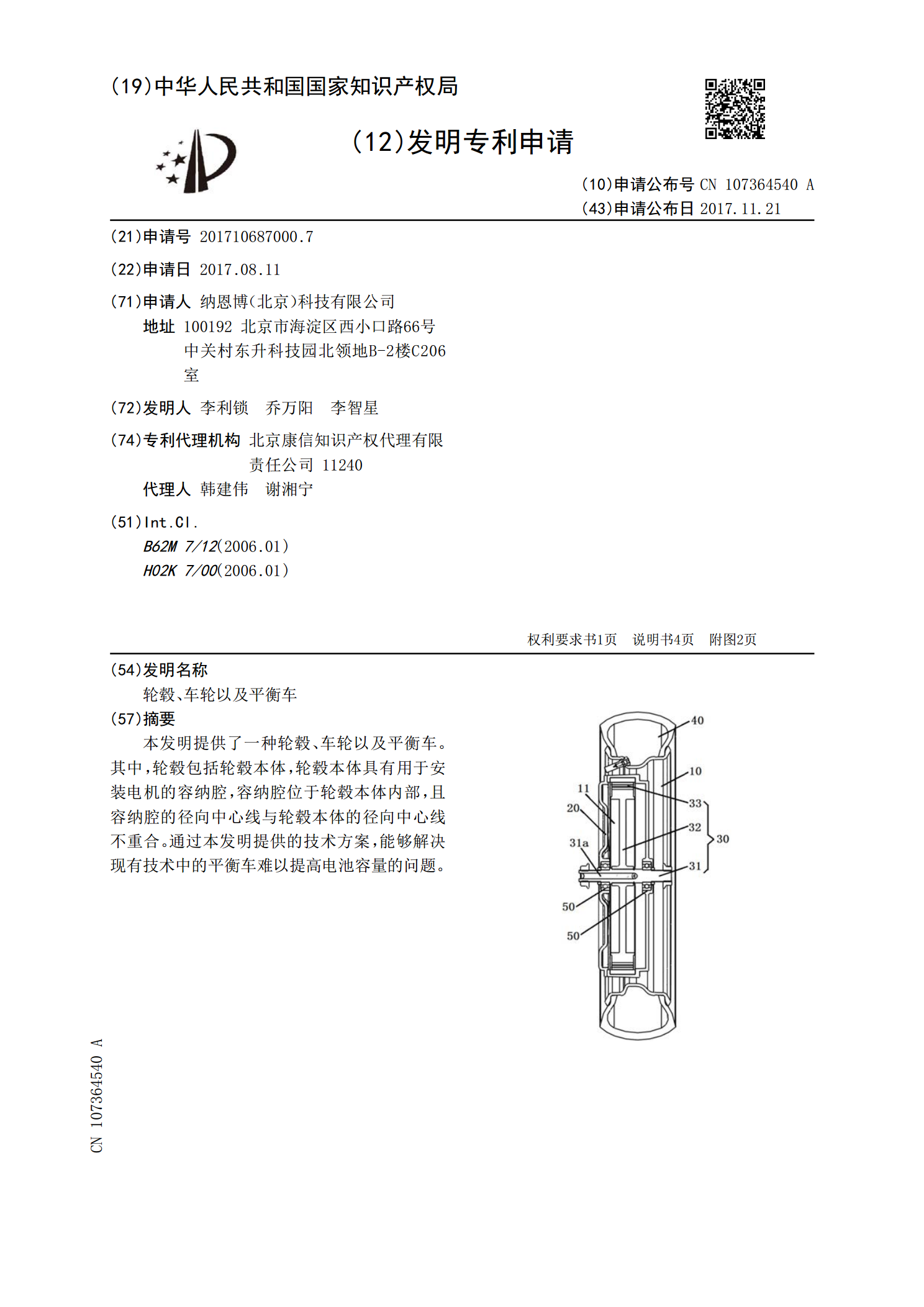
本发明提供了一种轮毂、车轮以及平衡车。其中,轮毂包括轮毂本体,轮毂本体具有用于安装电机的容纳腔,容纳腔位于轮毂本体内部,且容纳腔的径向中心线与轮毂本体的径向中心线不重合。通过本发明提供的技术方案,能够解决现有技术中的平衡车难以提高电池容量的问题。

一种平衡车用车轮及平衡车.pdf
本发明公开了一种平衡车用车轮及平衡车,其中的平衡车用车轮,包括控制板、定子、转子和轮轴,控制板安装于定子上且相对于定子固定设置,定子安装于轮轴上且相对于轮轴固定设置,转子相对于轮轴转动设置,轮胎安装于转子上。本发明平衡车用车轮及平衡车,控制板安装于定子上,而不是安装于车架内,可节省车架上的空间,使平衡车结构紧凑,且控制板安装于车轮内,车轮可由厂家直接装配,做成模块化的结构,便于整车的组装,提高生产效率。

平衡车离地制动方法及平衡车.pdf
本发明涉及一种平衡车离地制动方法及平衡车,离地制动方法包括如下步骤:获取平衡车的离地信息;判定所述离地信息是否从接地状态变成离地状态,若判定结果为是,则控制平衡车的车轮停止运转。本发明方法简便巧妙,平衡车的离地制动安全可靠。
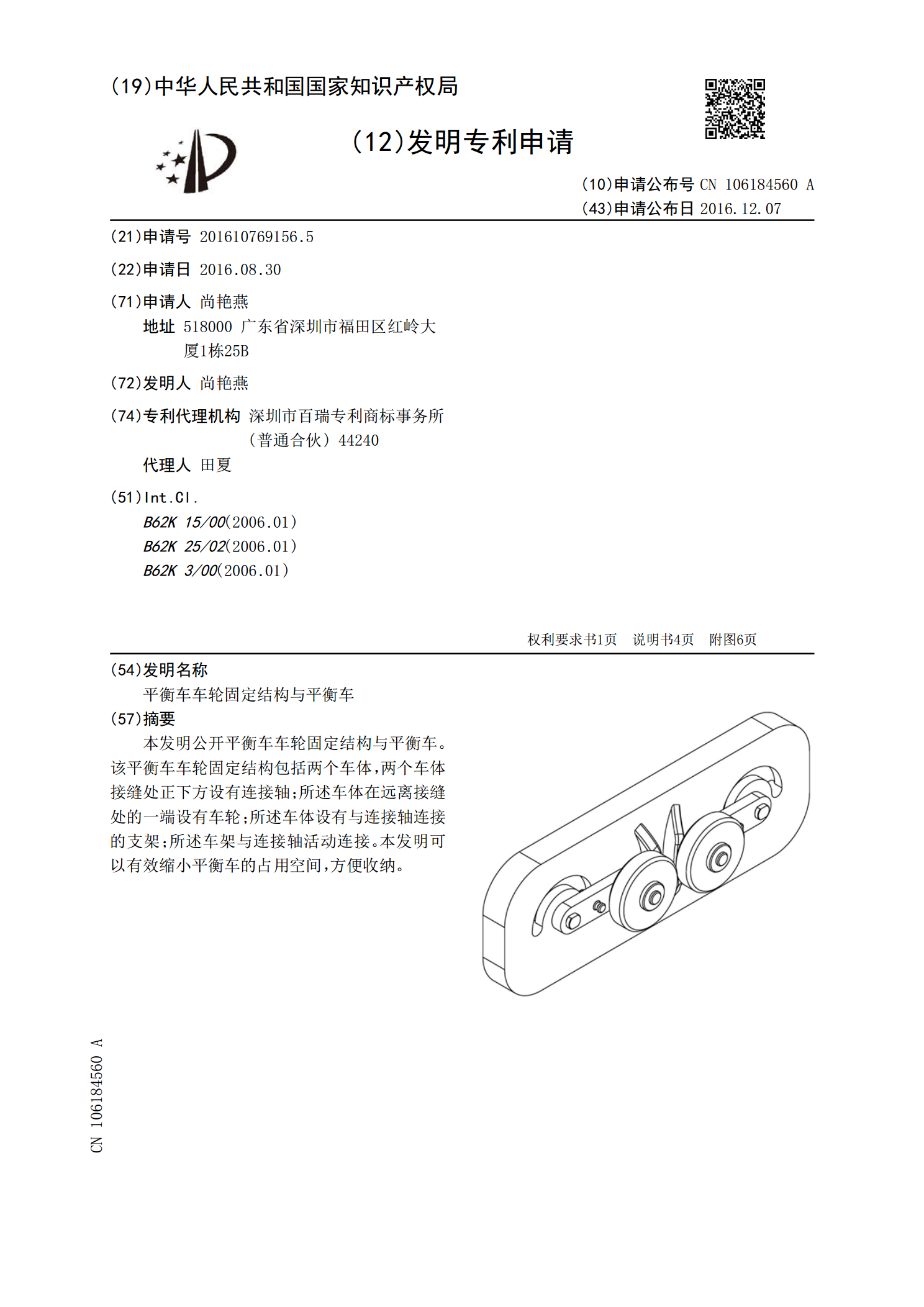
平衡车车轮固定结构与平衡车.pdf
本发明公开平衡车车轮固定结构与平衡车。该平衡车车轮固定结构包括两个车体,两个车体接缝处正下方设有连接轴;所述车体在远离接缝处的一端设有车轮;所述车体设有与连接轴连接的支架;所述车架与连接轴活动连接。本发明可以有效缩小平衡车的占用空间,方便收纳。