
车辆及其横向控制方法、系统、电子设备和存储介质.pdf

宜然****找我

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆及其横向控制方法、系统、电子设备和存储介质.pdf
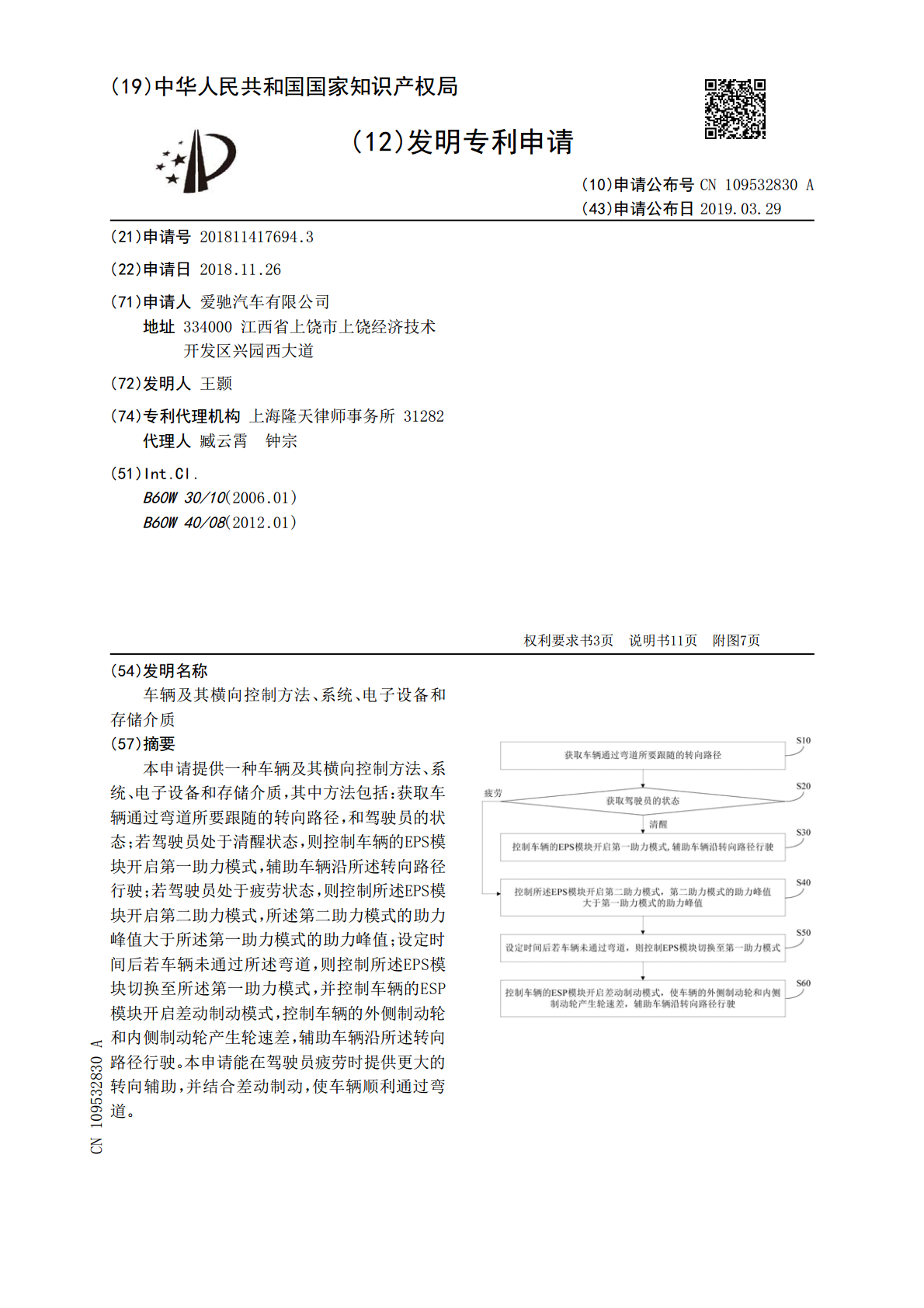
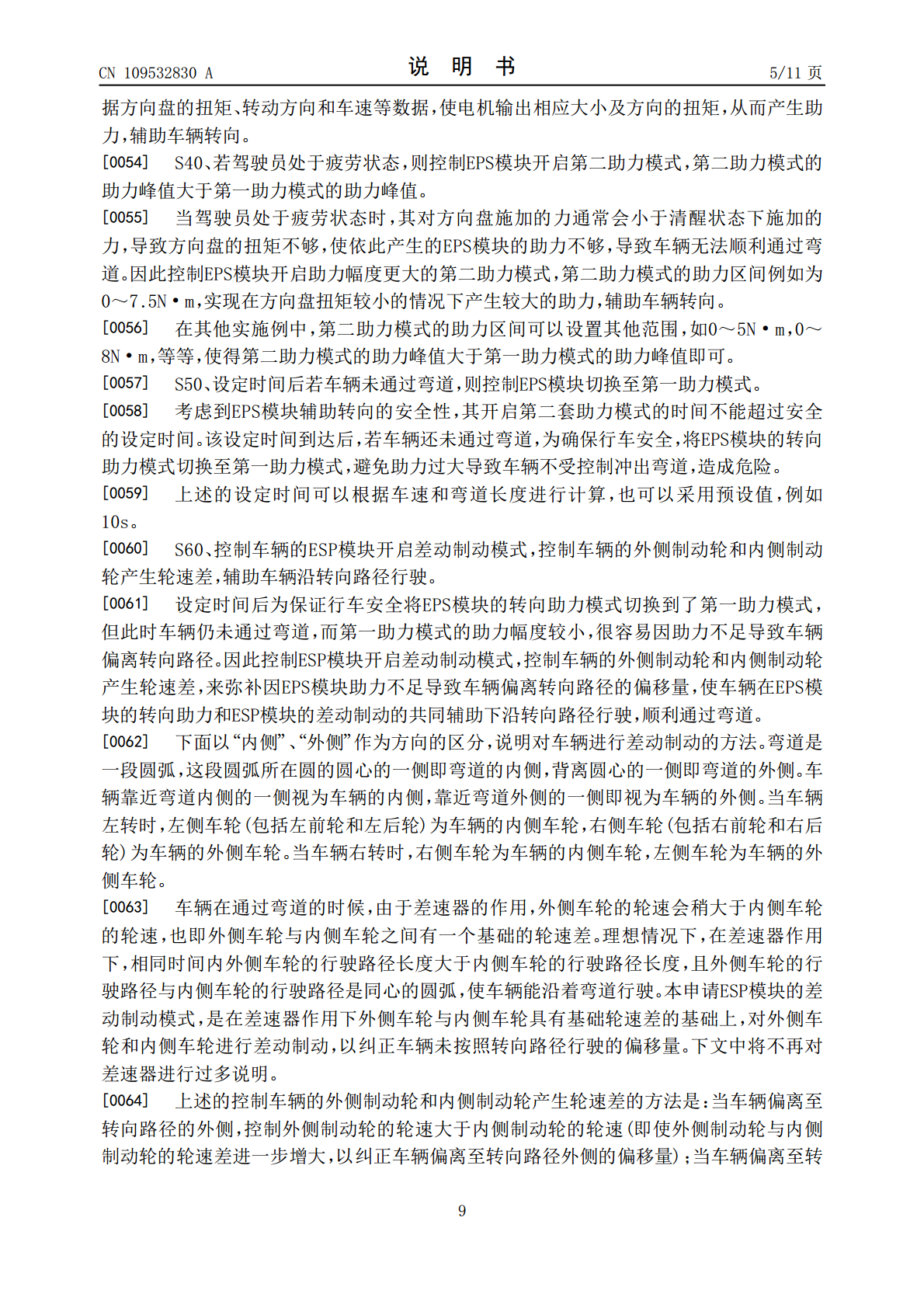
本申请提供一种车辆及其横向控制方法、系统、电子设备和存储介质,其中方法包括:获取车辆通过弯道所要跟随的转向路径,和驾驶员的状态;若驾驶员处于清醒状态,则控制车辆的EPS模块开启第一助力模式,辅助车辆沿所述转向路径行驶;若驾驶员处于疲劳状态,则控制所述EPS模块开启第二助力模式,所述第二助力模式的助力峰值大于所述第一助力模式的助力峰值;设定时间后若车辆未通过所述弯道,则控制所述EPS模块切换至所述第一助力模式,并控制车辆的ESP模块开启差动制动模式,控制车辆的外侧制动轮和内侧制动轮产生轮速差,辅助车辆沿所述

车辆及其控制方法、系统和存储介质.pdf
本发明提出了一种车辆及其控制方法、系统和存储介质,其中,方法包括:接收车载娱乐启动指令;根据车载娱乐启动指令判断是否满足第一启动条件;如果满足第一启动条件,则车辆的第一级设备启动并进入娱乐模式;以及第一级设备向第二级设备和第三级设备发送娱乐模式指令,其中,第二级设备根据娱乐模式指令进入娱乐模式,第三级设备根据娱乐模式指令进行自检,在符合第三级设备对应的第二启动条件之后,第三级设备进行启动并进入娱乐模式,以使车辆启动车载娱乐模式。由此,在车辆同时满足第一启动条件和第二启动条件之后,控制车辆进入娱乐模式,从而
车辆横向控制方法、装置、存储介质及电子设备.pdf
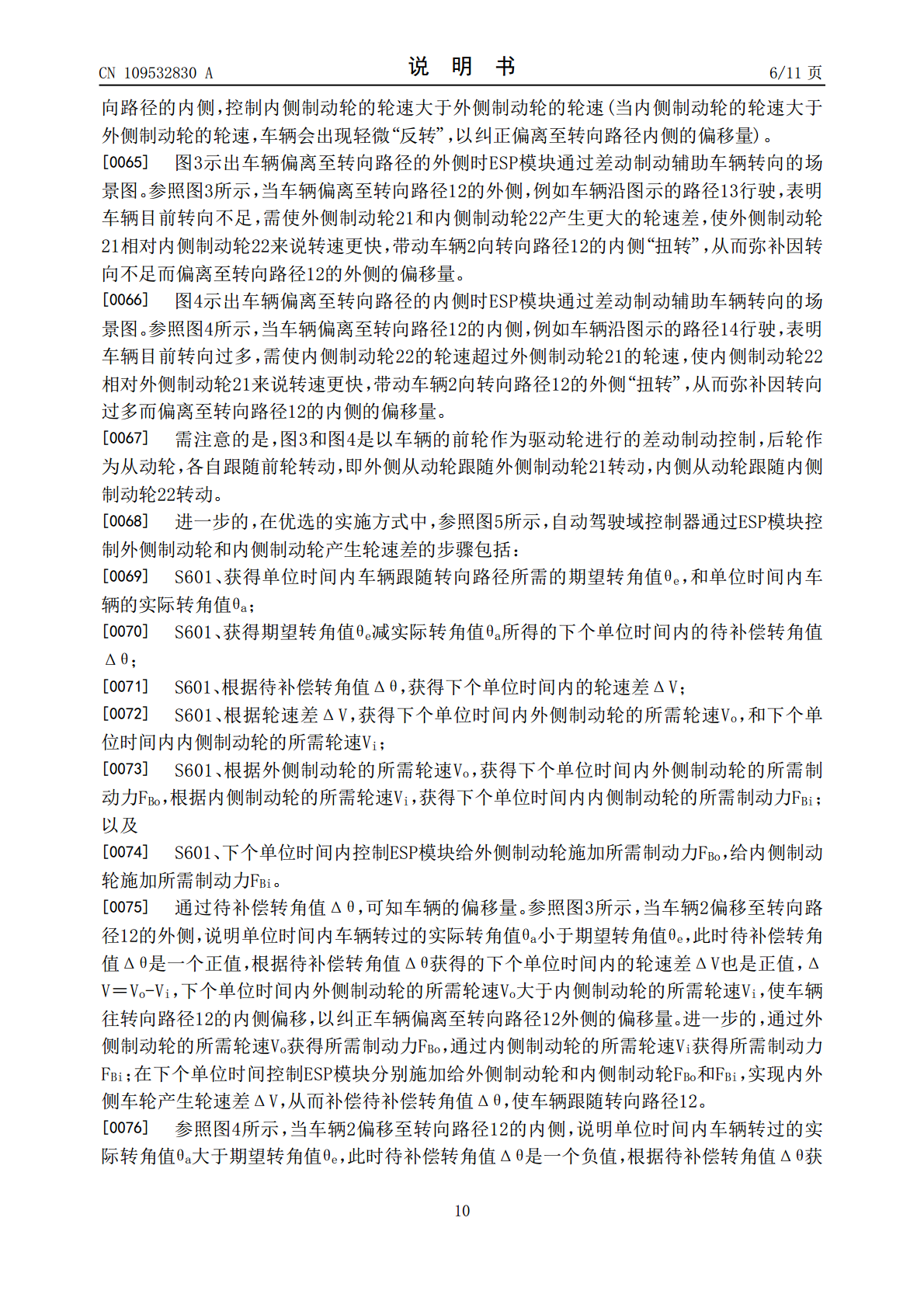
本申请实施例公开了一种车辆横向控制方法及相关设备,涉及自动驾驶技术领域。该方法包括:根据初始横向控制扭矩的方向与手力矩的方向是否相反,确定第一布尔值;若第一布尔值为真,则根据手力矩得到第一修正系数,将第一修正系数作为目标修正系数;根据目标修正系数和初始横向控制扭矩计算得到目标横向控制扭矩,以使车辆控制器根据目标横向控制扭矩对车辆进行横向控制。本发明用于车辆横向控制,主要为解决目前在进行车辆横向控制时,驾驶员主动干预ADAS系统时手感体验差的问题。

车辆及其驾驶接管提醒方法、系统、电子设备和存储介质.pdf
本申请提供一种车辆及其驾驶接管提醒方法、系统、电子设备和存储介质,其中方法包括:采集车辆的行驶数据,根据行驶数据判断车辆是否处于可行驶区域;采集驾驶员的重心数据,根据重心数据判断驾驶员是否处于疲劳状态;当车辆驶出可行驶区域,和/或驾驶员进入疲劳状态,发出驾驶接管请求;根据驾驶接管请求,屏蔽车载娱乐系统的多媒体信息,控制车载显示屏进行驾驶接管闪烁提醒,车载音响进行驾驶接管播报提醒。本申请当车辆驶出可行驶区域和驾驶员进入疲劳状态任一条件触发时即发出驾驶接管请求,能及时应对可能出现的危险情况;并在屏蔽多媒体信息
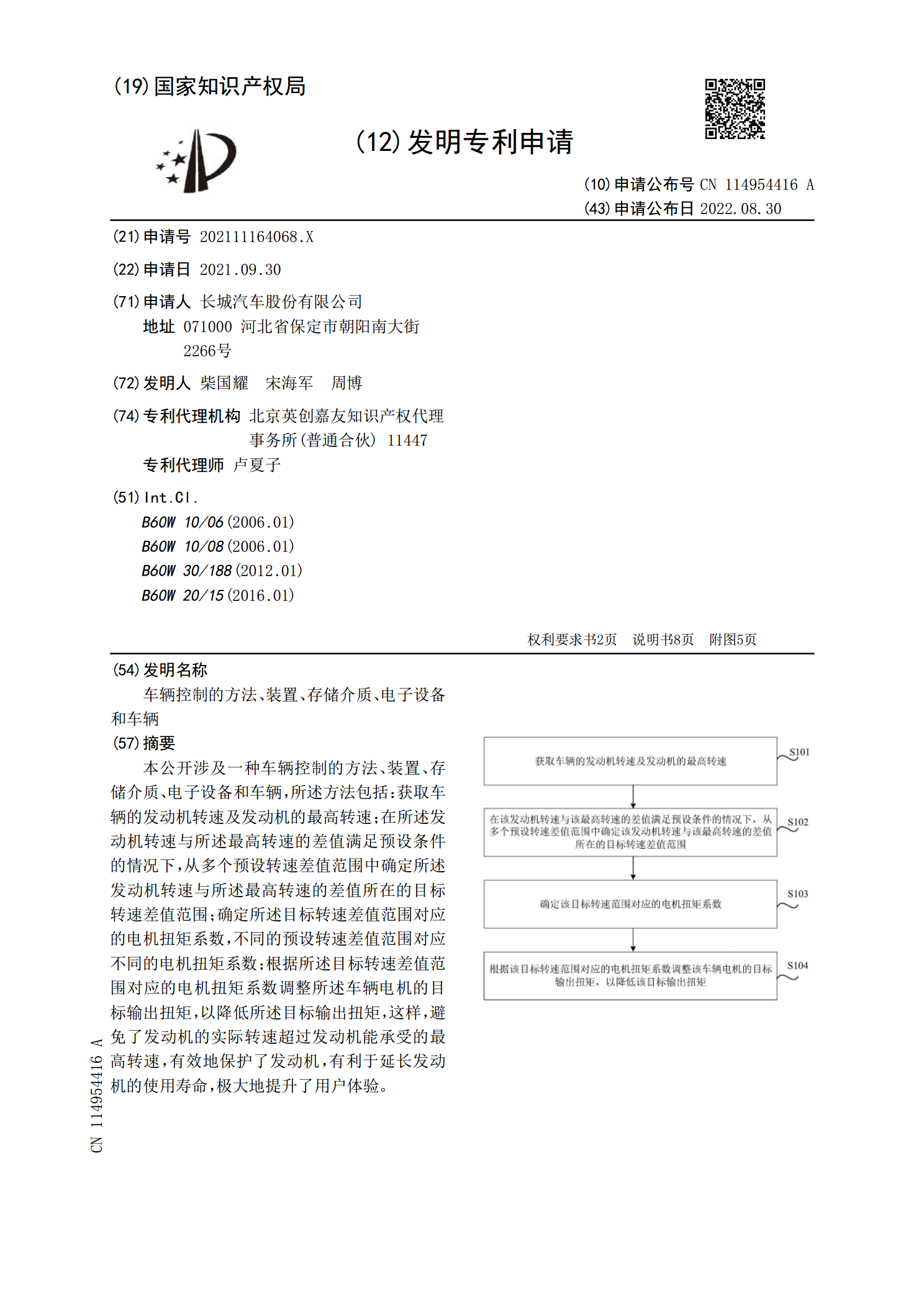
车辆控制的方法、装置、存储介质、电子设备和车辆.pdf
本公开涉及一种车辆控制的方法、装置、存储介质、电子设备和车辆,所述方法包括:获取车辆的发动机转速及发动机的最高转速;在所述发动机转速与所述最高转速的差值满足预设条件的情况下,从多个预设转速差值范围中确定所述发动机转速与所述最高转速的差值所在的目标转速差值范围;确定所述目标转速差值范围对应的电机扭矩系数,不同的预设转速差值范围对应不同的电机扭矩系数;根据所述目标转速差值范围对应的电机扭矩系数调整所述车辆电机的目标输出扭矩,以降低所述目标输出扭矩,这样,避免了发动机的实际转速超过发动机能承受的最高转速,有效地