
车辆横向控制方法、装置、存储介质及电子设备.pdf

睿德****找我

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆横向控制方法、装置、存储介质及电子设备.pdf
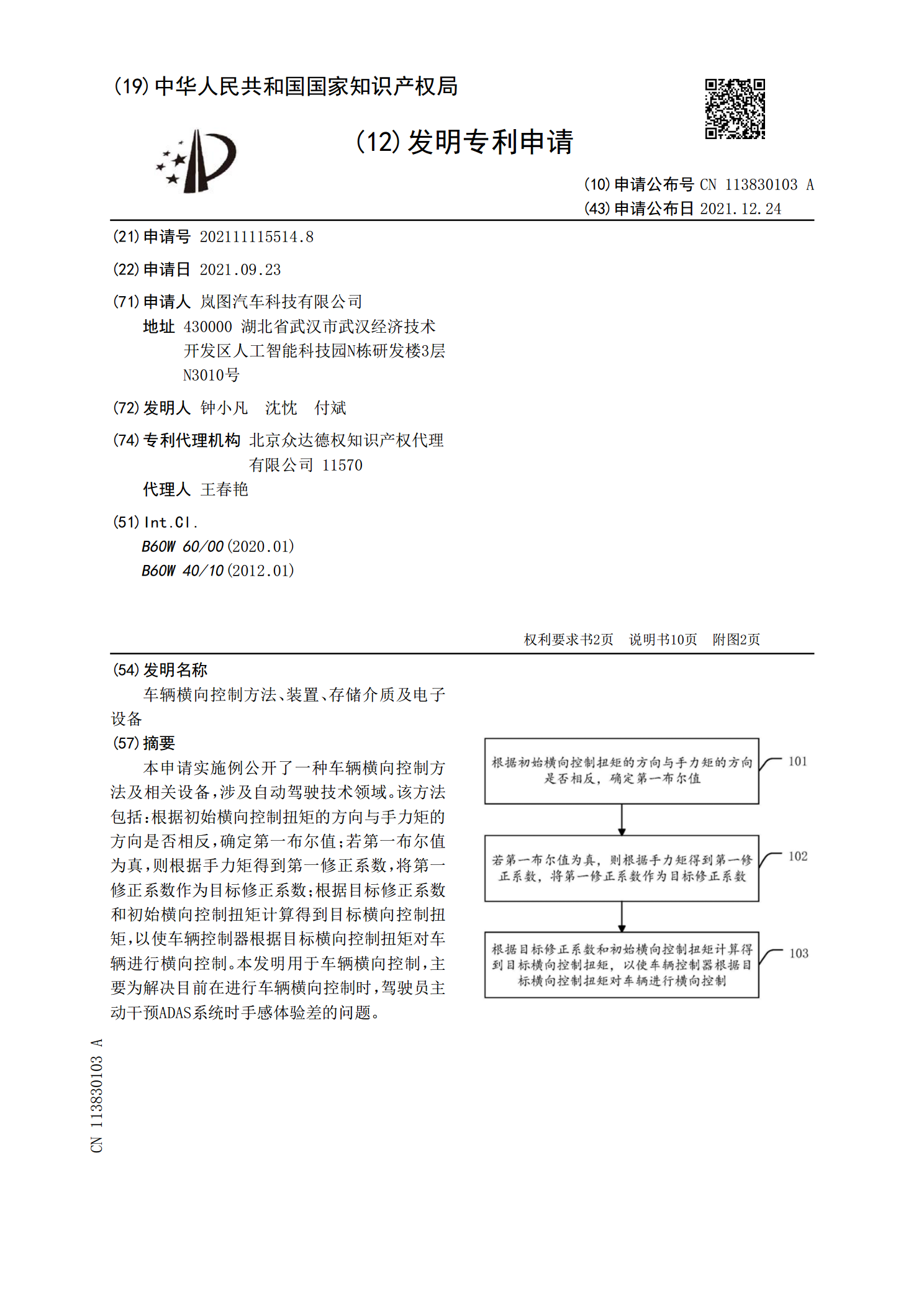
本申请实施例公开了一种车辆横向控制方法及相关设备,涉及自动驾驶技术领域。该方法包括:根据初始横向控制扭矩的方向与手力矩的方向是否相反,确定第一布尔值;若第一布尔值为真,则根据手力矩得到第一修正系数,将第一修正系数作为目标修正系数;根据目标修正系数和初始横向控制扭矩计算得到目标横向控制扭矩,以使车辆控制器根据目标横向控制扭矩对车辆进行横向控制。本发明用于车辆横向控制,主要为解决目前在进行车辆横向控制时,驾驶员主动干预ADAS系统时手感体验差的问题。

车辆的横向控制方法、装置、设备及存储介质.pdf
本发明涉及车辆控制技术领域,公开一种车辆的横向控制方法、装置、设备及存储介质,该方法包括:确定车辆的前轴中心点与后轴中心点;基于前轴中心点与后轴中心点确定参考点,并以参考点为基准构建车辆横向动力学模型;根据车辆横向动力学模型建立误差模型;根据误差模型计算控制误差矩阵;根据控制误差矩阵计算前轮转角控制量,并将前轮转角控制量转化为方向盘角度,根据方向盘角度对车辆进行横向控制。通过建立动力学模型与误差模型,计算出前轮转角控制量并转化为方向盘角度,根据方向盘角度对车辆进行横向控制,解决现有技术车辆高速工况下不稳定
车辆横向控制方法、装置、设备及存储介质.pdf
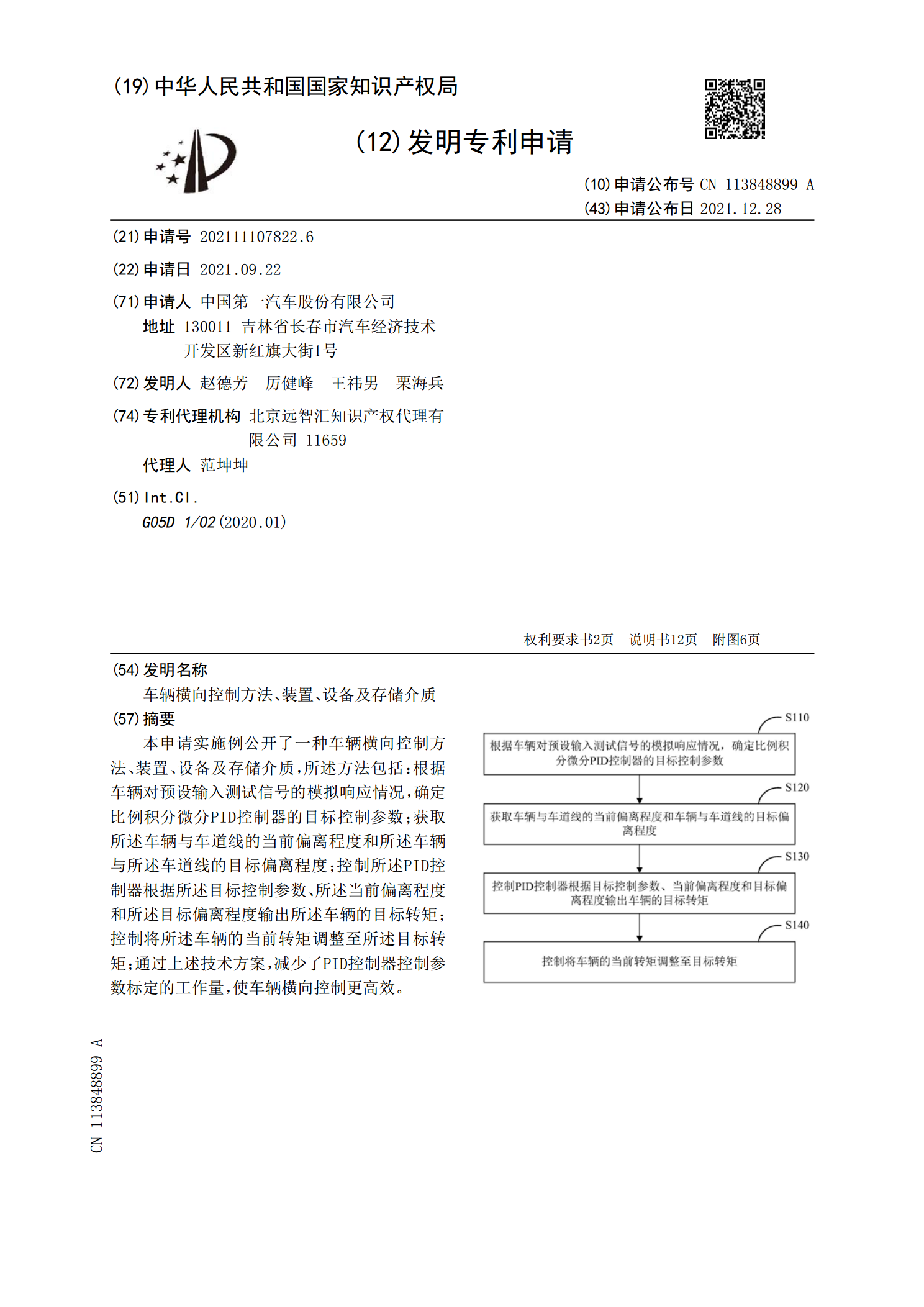
本申请实施例公开了一种车辆横向控制方法、装置、设备及存储介质,所述方法包括:根据车辆对预设输入测试信号的模拟响应情况,确定比例积分微分PID控制器的目标控制参数;获取所述车辆与车道线的当前偏离程度和所述车辆与所述车道线的目标偏离程度;控制所述PID控制器根据所述目标控制参数、所述当前偏离程度和所述目标偏离程度输出所述车辆的目标转矩;控制将所述车辆的当前转矩调整至所述目标转矩;通过上述技术方案,减少了PID控制器控制参数标定的工作量,使车辆横向控制更高效。
自动驾驶车辆横向控制的方法、装置、车辆及存储介质.pdf
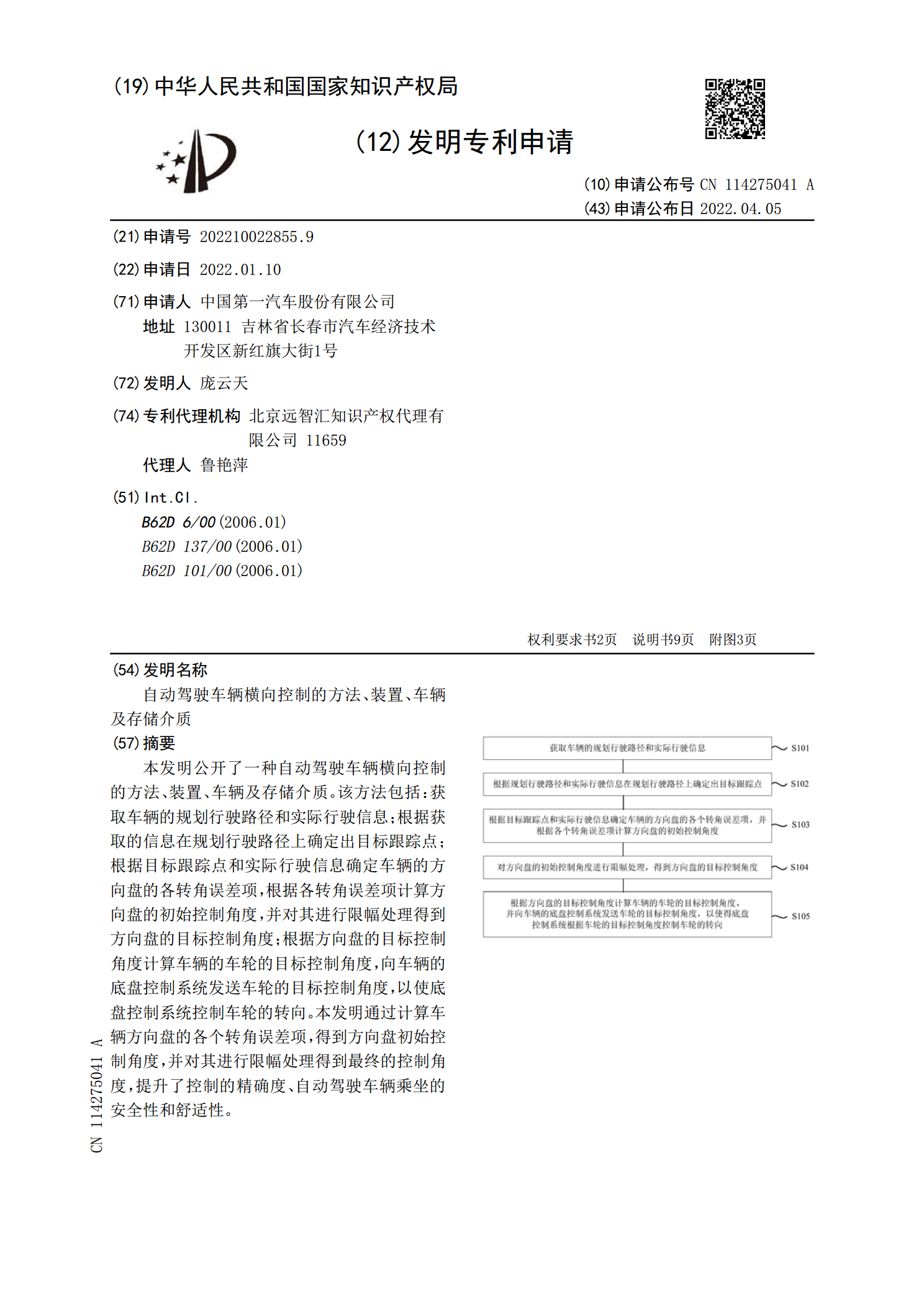
本发明公开了一种自动驾驶车辆横向控制的方法、装置、车辆及存储介质。该方法包括:获取车辆的规划行驶路径和实际行驶信息;根据获取的信息在规划行驶路径上确定出目标跟踪点;根据目标跟踪点和实际行驶信息确定车辆的方向盘的各转角误差项,根据各转角误差项计算方向盘的初始控制角度,并对其进行限幅处理得到方向盘的目标控制角度;根据方向盘的目标控制角度计算车辆的车轮的目标控制角度,向车辆的底盘控制系统发送车轮的目标控制角度,以使底盘控制系统控制车轮的转向。本发明通过计算车辆方向盘的各个转角误差项,得到方向盘初始控制角度,并对
车辆控制方法、装置、存储介质及电子设备.pdf
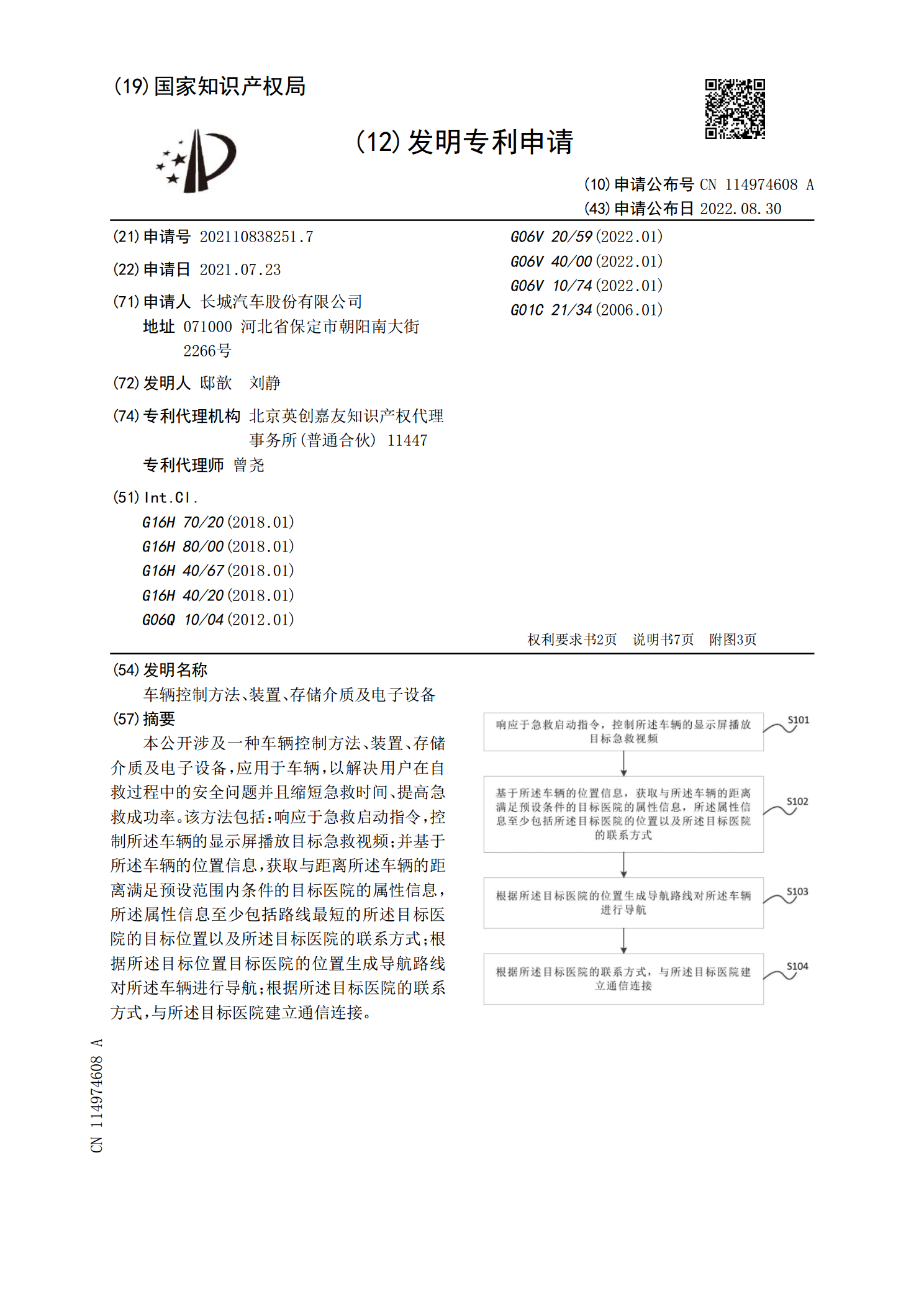
本公开涉及一种车辆控制方法、装置、存储介质及电子设备,应用于车辆,以解决用户在自救过程中的安全问题并且缩短急救时间、提高急救成功率。该方法包括:响应于急救启动指令,控制所述车辆的显示屏播放目标急救视频;并基于所述车辆的位置信息,获取与距离所述车辆的距离满足预设范围内条件的目标医院的属性信息,所述属性信息至少包括路线最短的所述目标医院的目标位置以及所述目标医院的联系方式;根据所述目标位置目标医院的位置生成导航路线对所述车辆进行导航;根据所述目标医院的联系方式,与所述目标医院建立通信连接。