
一种用于叶轮总成吊装定位调姿的施工方法及装置.pdf

音景****ka


1/10
2/10
3/10
4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共32页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于叶轮总成吊装定位调姿的施工方法及装置.pdf
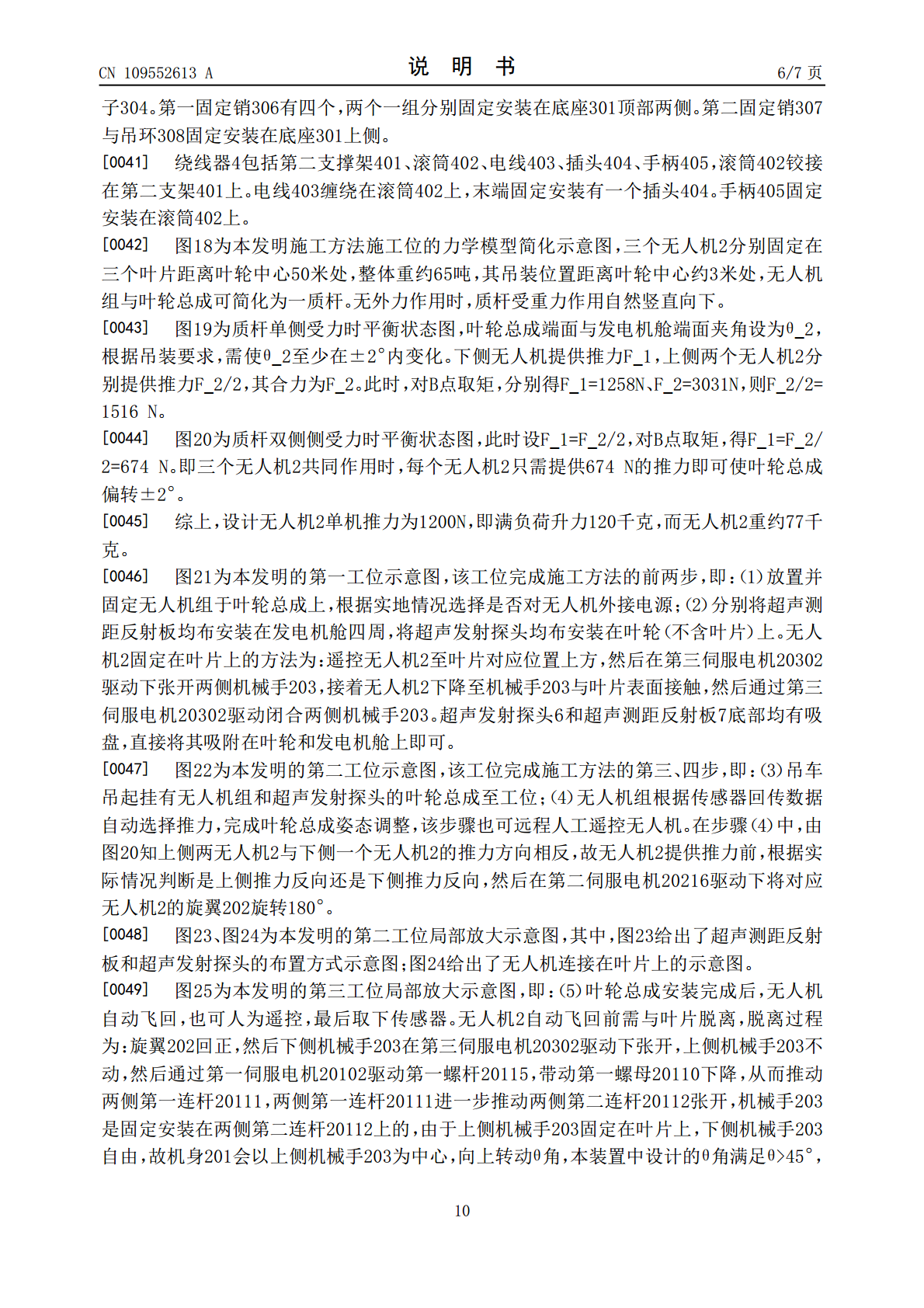
本发明公开一种用于叶轮总成吊装定位调姿的施工方法及装置,该装置由三个被锁扣连接在一起的完全一样的无人机模块构成,就其中之一而言,每个无人机模块包括无人机、停机平台、绕线器等。施工方法包括:(1)放置并固定无人机组于叶轮总成上,根据实地情况选择是否对无人机外接电源;(2)分别将超声测距反射板均布安装在发电机舱四周,将超声发射探头均布安装在叶轮上;(3)吊车吊起挂有无人机组和超声发射探头的叶轮总成至工位;(4)无人机组根据传感器回传数据自动选择推力,完成叶轮总成姿态调整,该步骤也可远程人工遥控无人机;(5)叶

调姿定位装置.pdf
本发明提供了一种调姿定位装置,包括支撑架、第一移动装置、第二移动装置、第三移动装置、旋转组件及吸附装置:第一移动装置能够相对支撑架沿Z轴移动;第二移动装置与第一移动装置连接,第二移动装置能够相对第一移动装置沿X轴移动;第三移动装置与第二移动装置连接,第三移动装置能够相对第二移动装置沿Y轴移动;旋转组件设置在第三移动装置底部,吸附装置与旋转组件连接,旋转组件能够带动吸附装置按照预设方位旋转,吸附装置用于吸附金属材质的预埋锚垫板;以将预埋锚垫板调整至预设位置;利用本装置可以带动预埋锚垫板在X、Y、Z及预设回转

一种用于航空轮胎惯性试验台倾斜调姿装置及调姿方法.pdf
本申请提供了一种用于航空轮胎惯性试验台倾斜调姿装置及调姿方法,属于轮胎试验技术领域。所述装置包括安装在试验台前端的枢轴(1),以及当试验台绕枢轴(1)转动时,提供试验台后端运动的圆弧导轨(2),试验台上设置有顶升机构与步进机构,通过顶升机构(3)脱离圆弧导轨(2),之后通过步进机构(4)的插销油缸(41)及推移油缸(42)推动试验台沿圆弧导轨运动,进而使安装在试验台前端的机轮与转鼓之间形成夹角,进行倾斜试验。该装置通过机械、液压及控制的相互配合,能够实现航空轮胎惯性试验台自动、精确地倾斜调姿。
一种用于装配外涵机匣的调姿定位装置.pdf
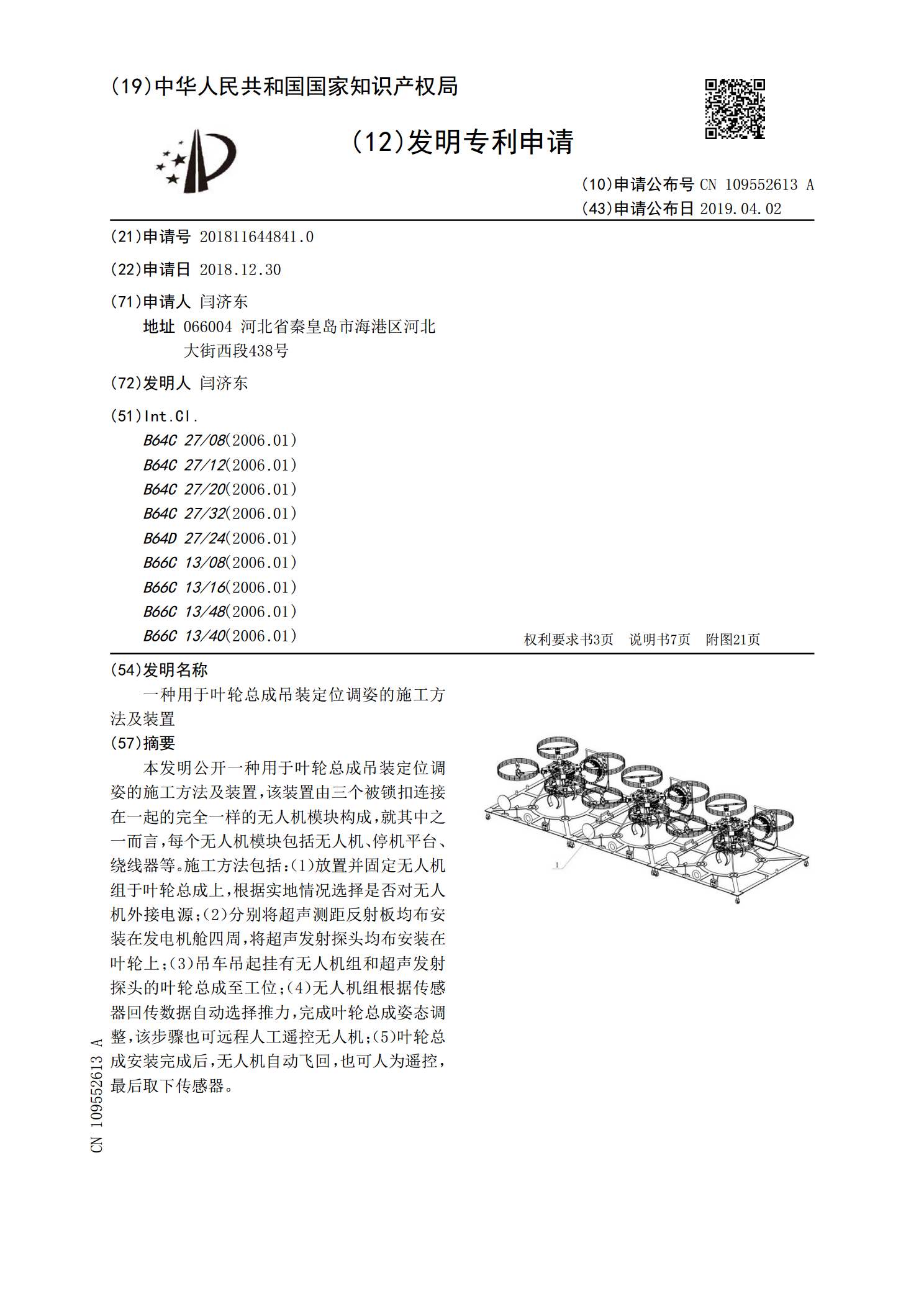
本发明公开了一种用于装配外涵机匣的调姿定位装置,包括竖向调节组件、调姿组件、夹紧组件和辅助支撑组件;所述竖向调节组件包括底座、滑轨、丝杆、涡轮箱和竖向驱动元件;所述调姿组件包括俯仰驱动元件、横转驱动元件、第一RV减速机、第二RV减速机、滑台和摆动关节;夹紧组件包括支承盘和压紧装置;所述辅助支撑组件包括支撑臂和平托架。具有高传动精度、稳定性高等特点,解决了人工装配时调姿定位不一致、稳定性差等问题,提高外涵机匣装配定位调姿精度10倍以上,预计生产效率提高5倍以上。本发明应用于航空航天机械领域。
一种用于风机叶轮总成与机舱空中对接的引导和定位装置.pdf
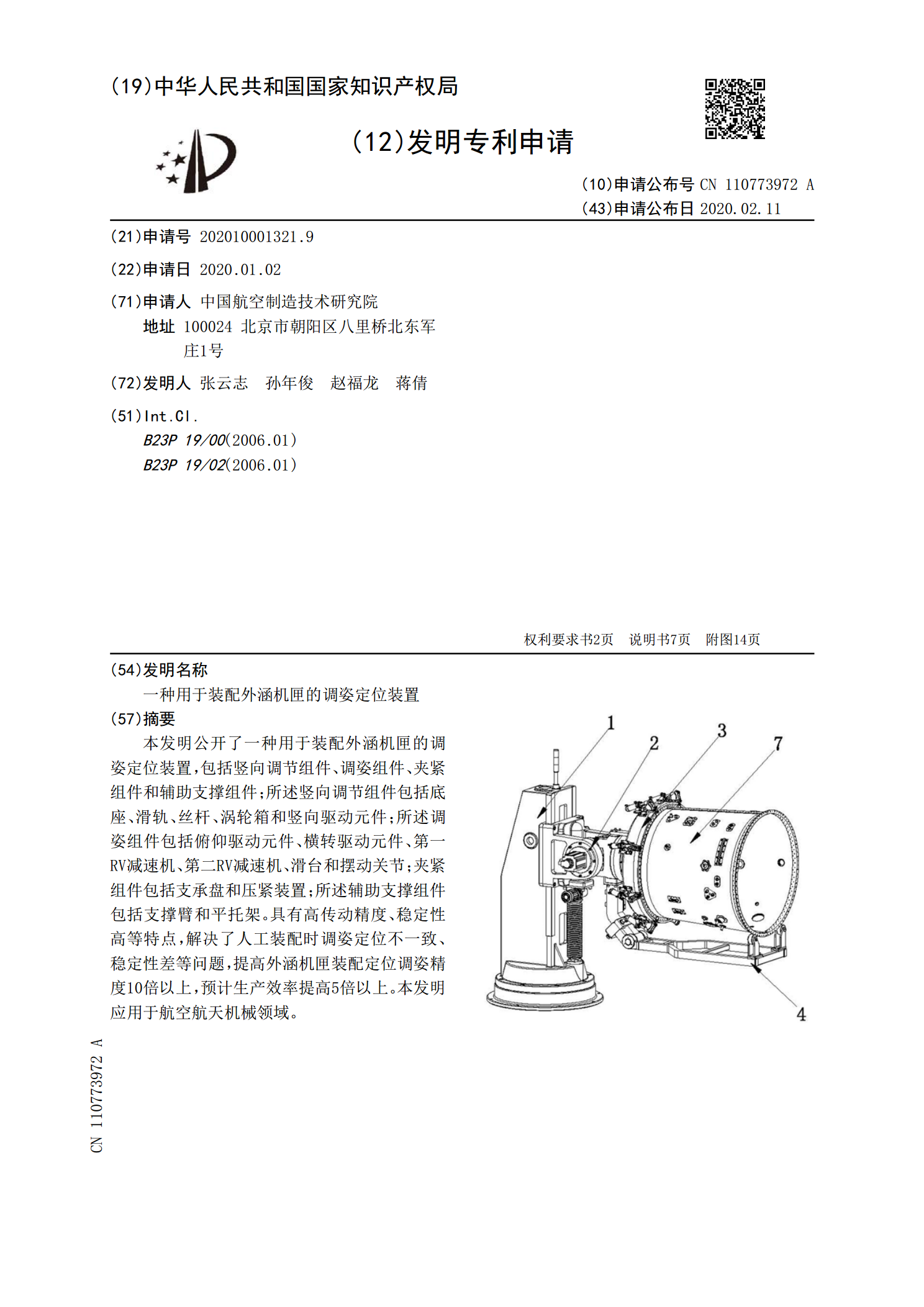
本发明公开一种用于风机叶轮总成与机舱空中对接的引导和定位装置,包括:相互铰接的第一弧形支撑板和第二弧形支撑板,其围成环形平面,多个挡板,其周向均匀铰接在所述环形平面上,且所述挡板内侧面为平面;多个定位液压机构,其一端与所述环形平面铰接,另一端与所述挡板外侧铰接,用于驱动所述挡板开合;多个支撑块,其周向均匀设置在所述环形平面内;多个旋转机构,其周向均匀设置在靠近所述支撑块的环形平面上,且输出轴与所述支撑块轴向一端固定连接,用于驱动所述支撑块绕所述输出轴旋转;多个引导液压机构,其与所述支撑块一一对应,且一端与