
后轮转向系统、方法及车辆.pdf

努力****幻翠


1/10
2/10
3/10
4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
后轮转向系统、方法及车辆.pdf
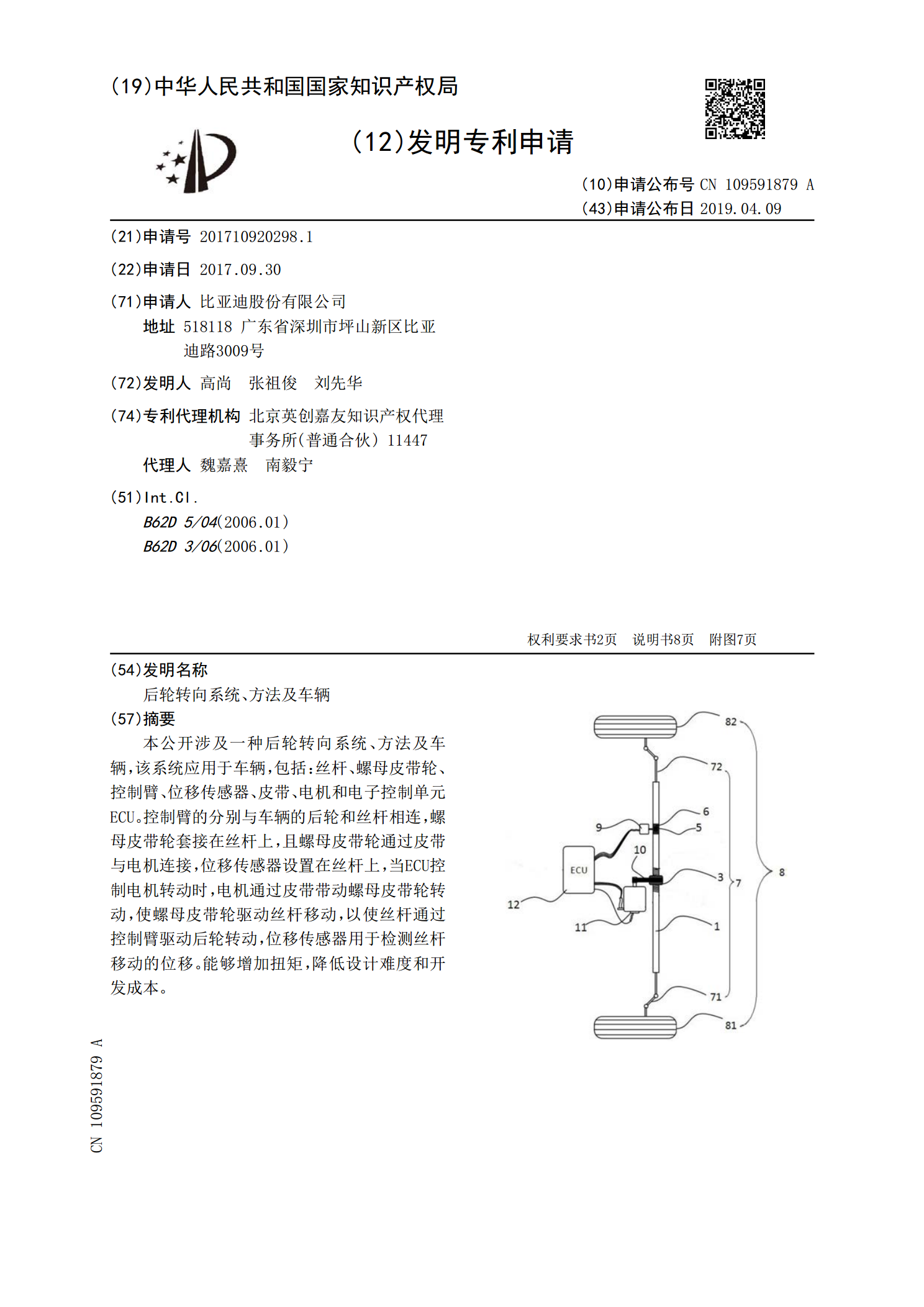
本公开涉及一种后轮转向系统、方法及车辆,该系统应用于车辆,包括:丝杆、螺母皮带轮、控制臂、位移传感器、皮带、电机和电子控制单元ECU。控制臂的分别与车辆的后轮和丝杆相连,螺母皮带轮套接在丝杆上,且螺母皮带轮通过皮带与电机连接,位移传感器设置在丝杆上,当ECU控制电机转动时,电机通过皮带带动螺母皮带轮转动,使螺母皮带轮驱动丝杆移动,以使丝杆通过控制臂驱动后轮转动,位移传感器用于检测丝杆移动的位移。能够增加扭矩,降低设计难度和开发成本。
用于操作后轮转向系统的方法和车辆的后轮转向系统.pdf
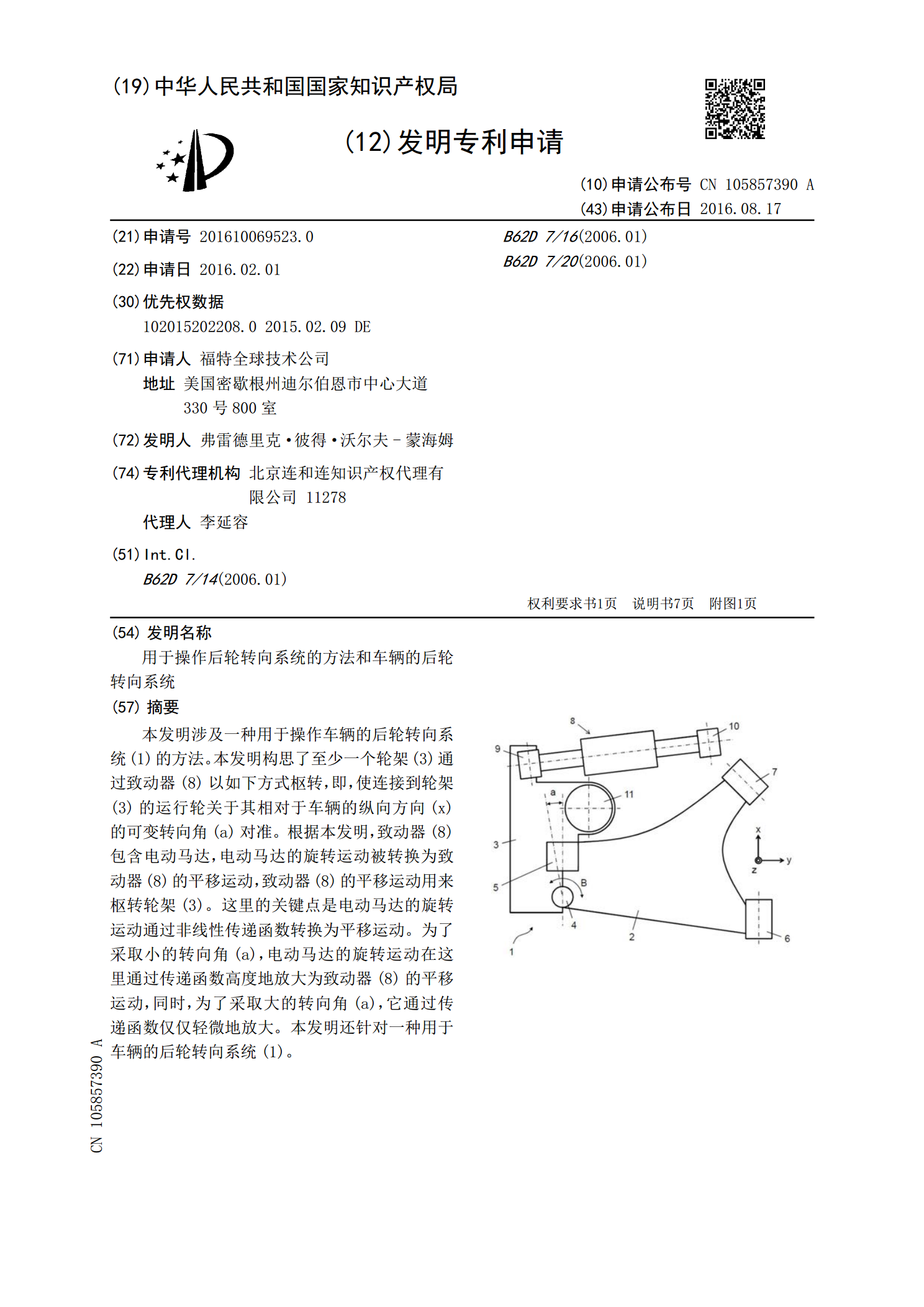
本发明涉及一种用于操作车辆的后轮转向系统(1)的方法。本发明构思了至少一个轮架(3)通过致动器(8)以如下方式枢转,即,使连接到轮架(3)的运行轮关于其相对于车辆的纵向方向(x)的可变转向角(a)对准。根据本发明,致动器(8)包含电动马达,电动马达的旋转运动被转换为致动器(8)的平移运动,致动器(8)的平移运动用来枢转轮架(3)。这里的关键点是电动马达的旋转运动通过非线性传递函数转换为平移运动。为了采取小的转向角(a),电动马达的旋转运动在这里通过传递函数高度地放大为致动器(8)的平移运动,同时,为了采取
车辆后轮主动转向系统和车辆.pdf
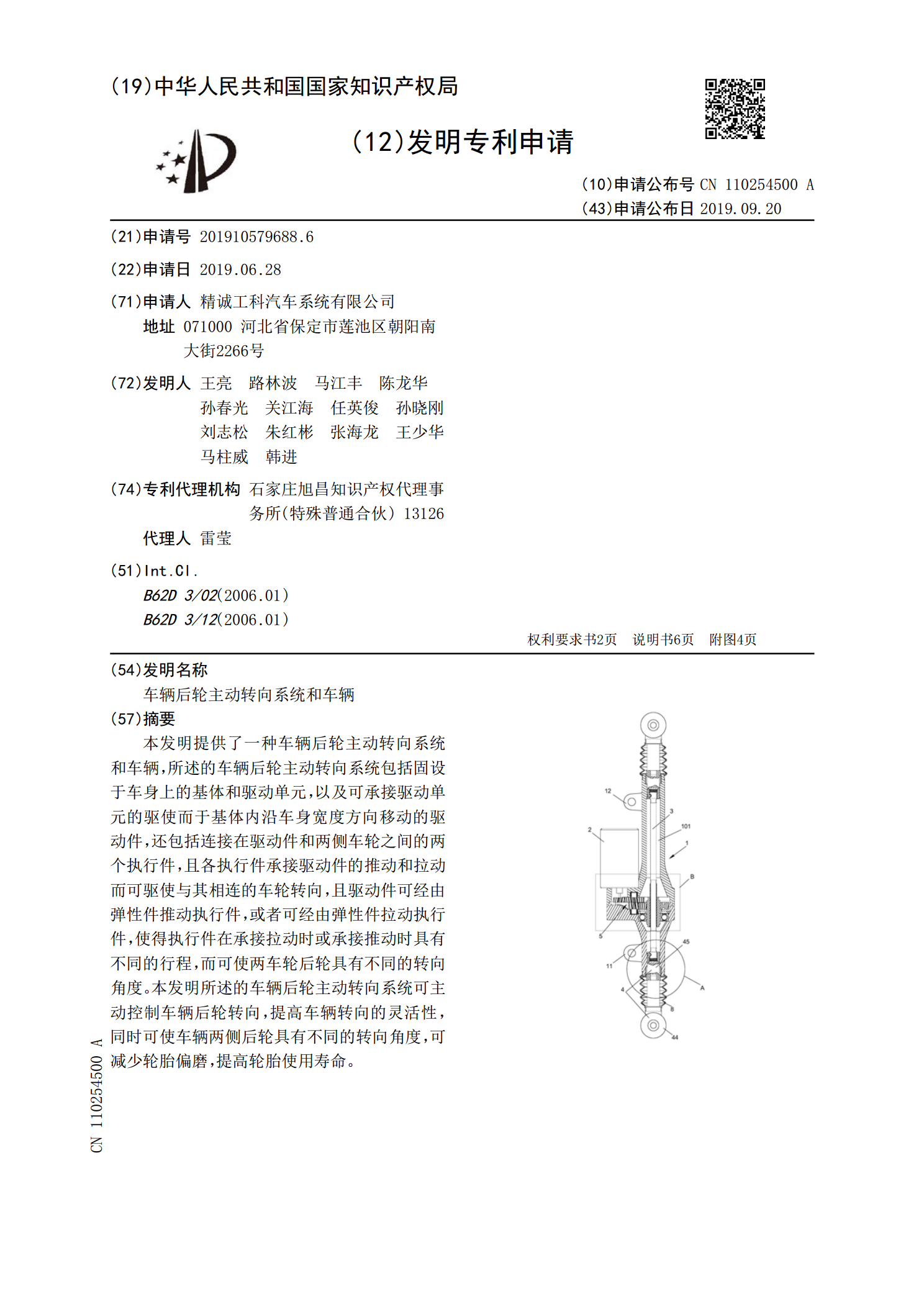
本发明提供了一种车辆后轮主动转向系统和车辆,所述的车辆后轮主动转向系统包括固设于车身上的基体和驱动单元,以及可承接驱动单元的驱使而于基体内沿车身宽度方向移动的驱动件,还包括连接在驱动件和两侧车轮之间的两个执行件,且各执行件承接驱动件的推动和拉动而可驱使与其相连的车轮转向,且驱动件可经由弹性件推动执行件,或者可经由弹性件拉动执行件,使得执行件在承接拉动时或承接推动时具有不同的行程,而可使两车轮后轮具有不同的转向角度。本发明所述的车辆后轮主动转向系统可主动控制车辆后轮转向,提高车辆转向的灵活性,同时可使车辆两
后轮转向器、车辆及其后轮转向系统.pdf
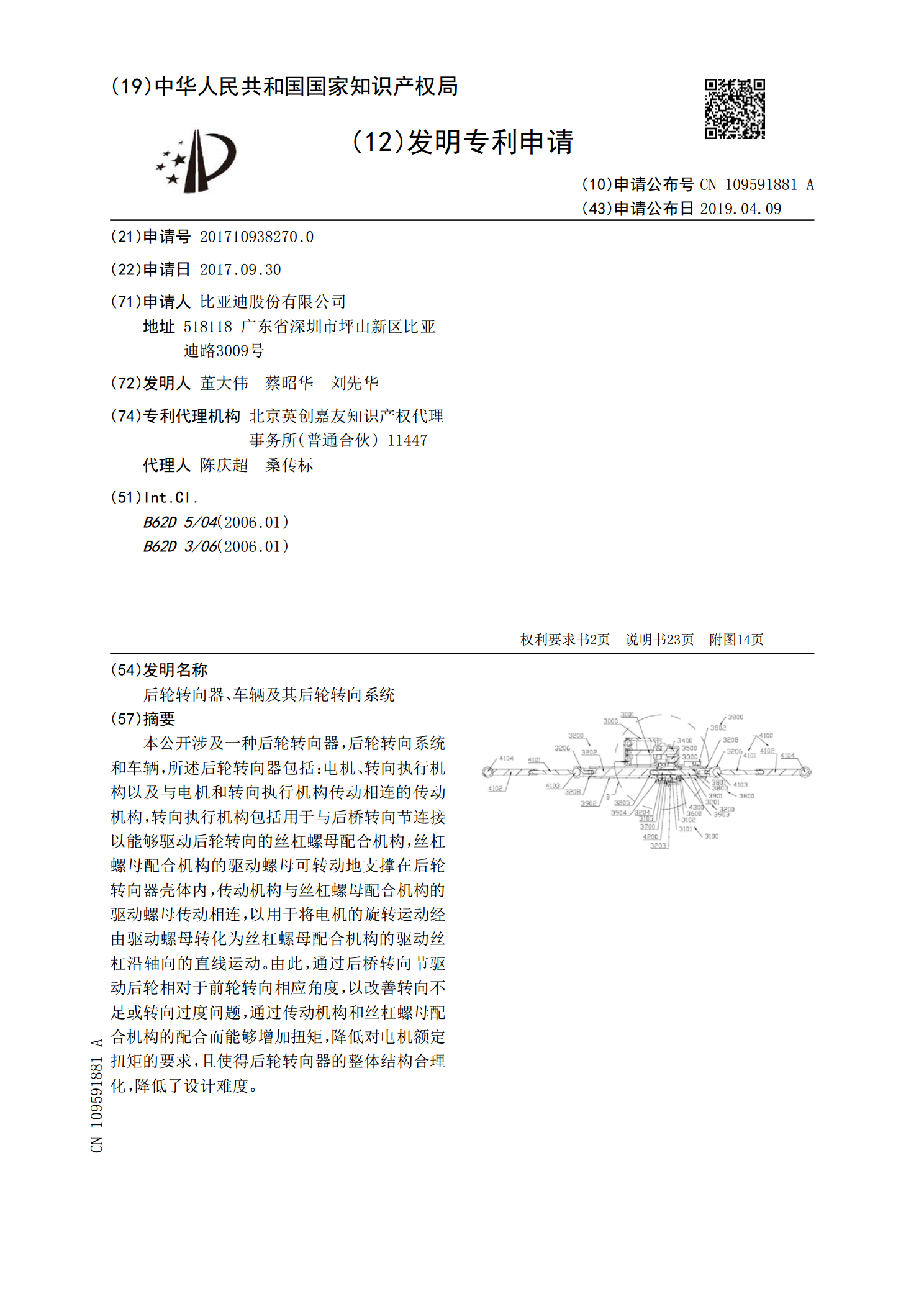
本公开涉及一种后轮转向器,后轮转向系统和车辆,所述后轮转向器包括:电机、转向执行机构以及与电机和转向执行机构传动相连的传动机构,转向执行机构包括用于与后桥转向节连接以能够驱动后轮转向的丝杠螺母配合机构,丝杠螺母配合机构的驱动螺母可转动地支撑在后轮转向器壳体内,传动机构与丝杠螺母配合机构的驱动螺母传动相连,以用于将电机的旋转运动经由驱动螺母转化为丝杠螺母配合机构的驱动丝杠沿轴向的直线运动。由此,通过后桥转向节驱动后轮相对于前轮转向相应角度,以改善转向不足或转向过度问题,通过传动机构和丝杠螺母配合机构的配合而
后轮转向器、车辆及其后轮转向系统.pdf
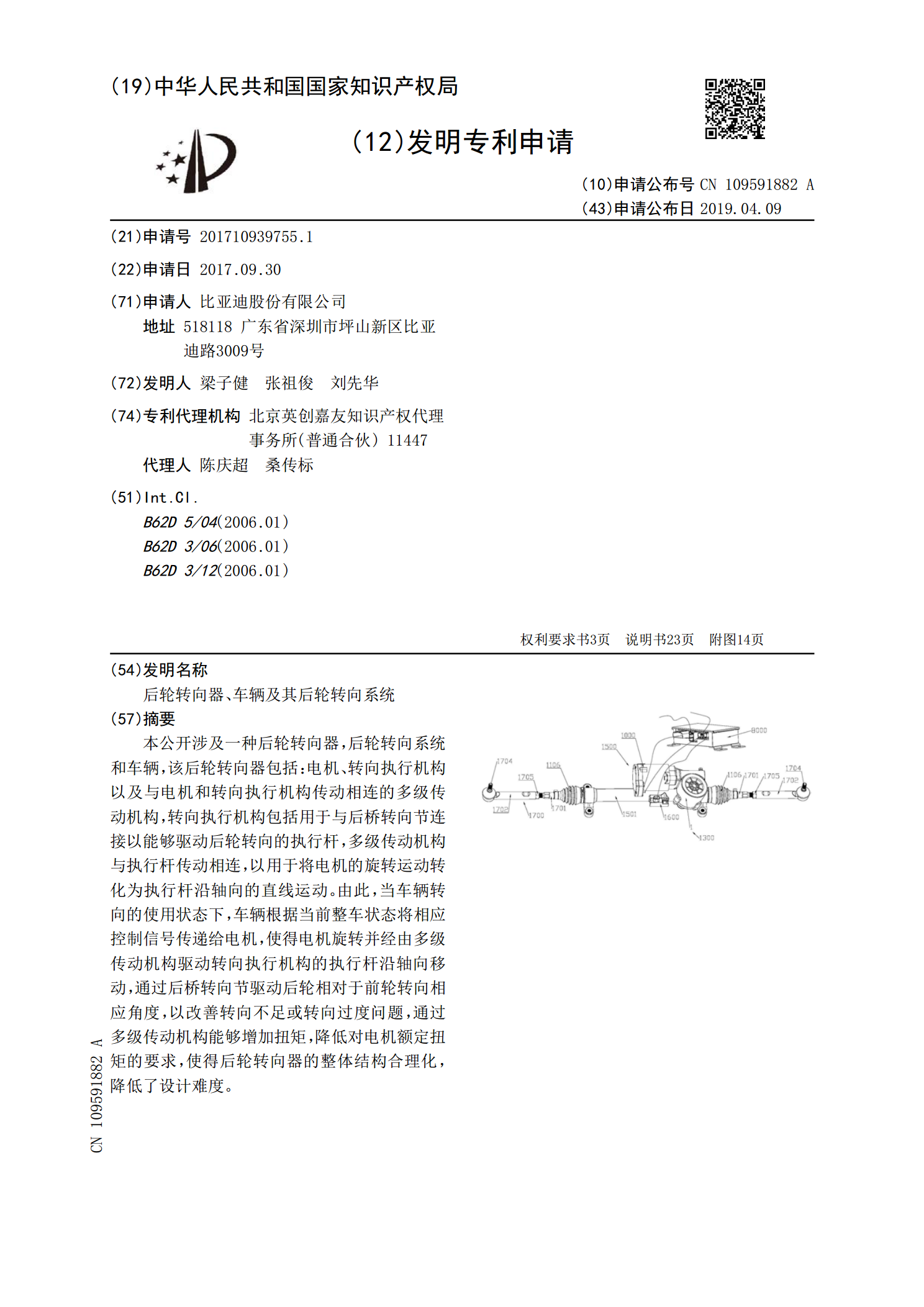
本公开涉及一种后轮转向器,后轮转向系统和车辆,该后轮转向器包括:电机、转向执行机构以及与电机和转向执行机构传动相连的多级传动机构,转向执行机构包括用于与后桥转向节连接以能够驱动后轮转向的执行杆,多级传动机构与执行杆传动相连,以用于将电机的旋转运动转化为执行杆沿轴向的直线运动。由此,当车辆转向的使用状态下,车辆根据当前整车状态将相应控制信号传递给电机,使得电机旋转并经由多级传动机构驱动转向执行机构的执行杆沿轴向移动,通过后桥转向节驱动后轮相对于前轮转向相应角度,以改善转向不足或转向过度问题,通过多级传动机构