
差动式非转向轮随动转向机构.pdf

邻家****曼玉

1/9
2/9
3/9
4/9
5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
差动式非转向轮随动转向机构.pdf
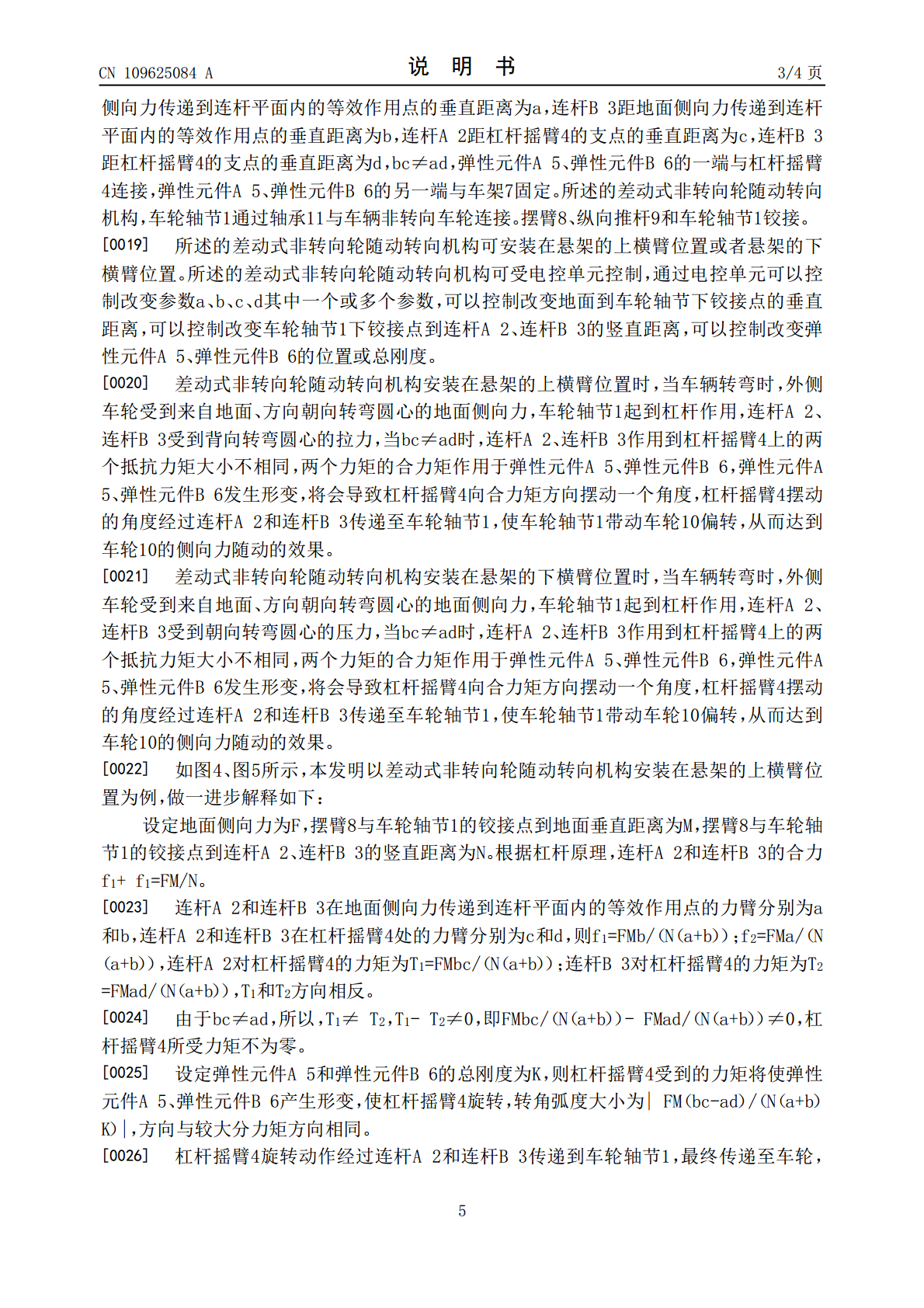
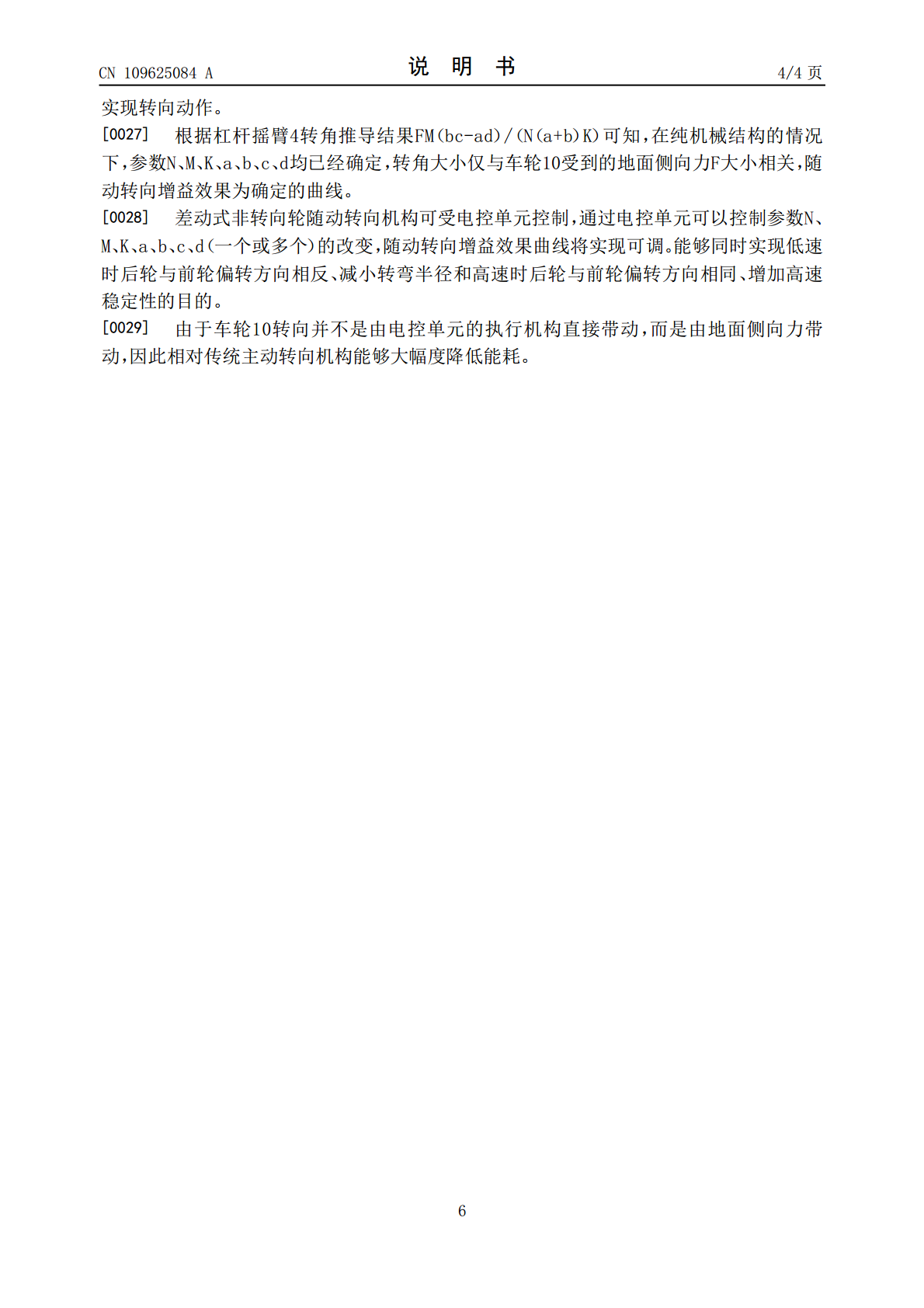
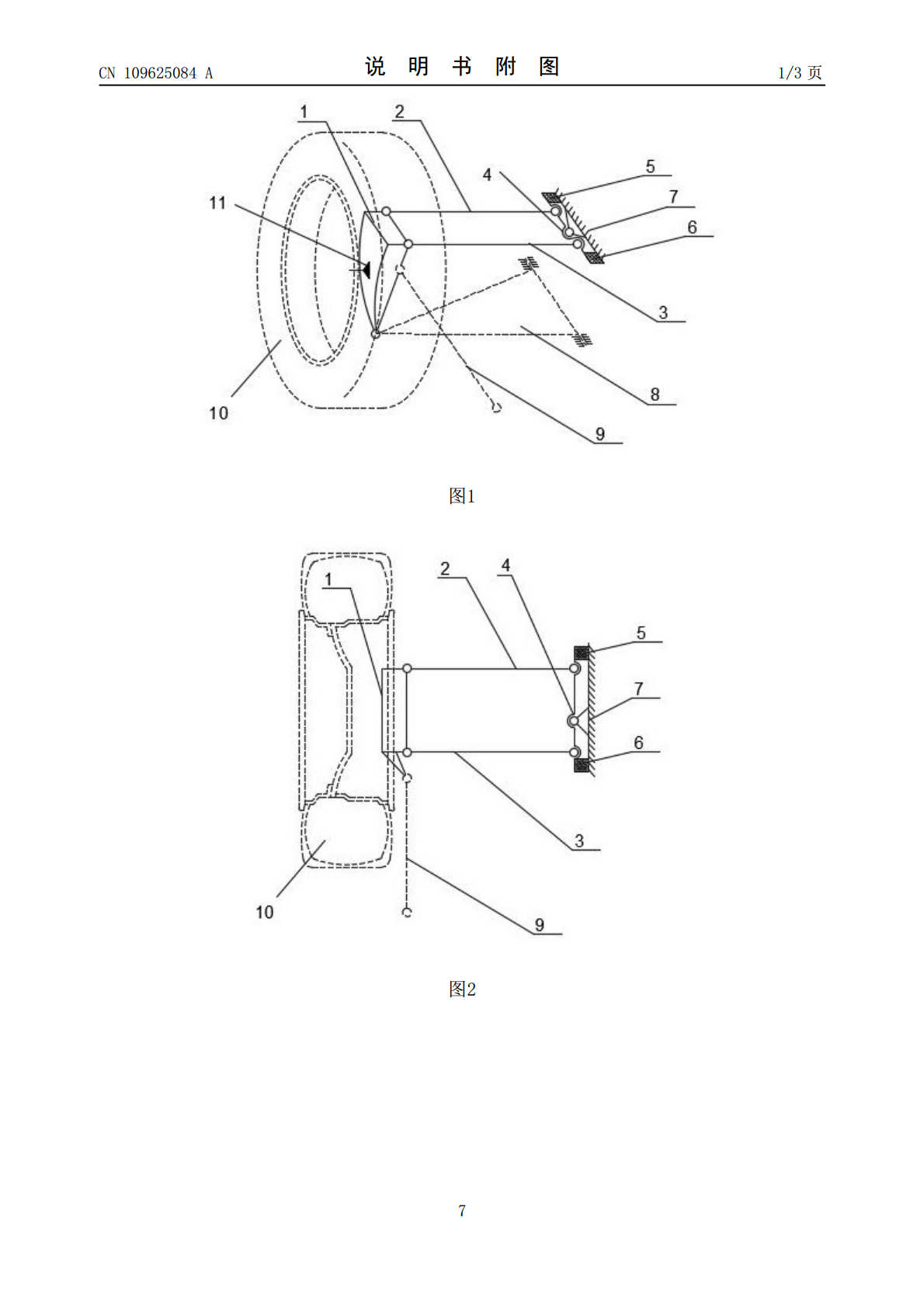
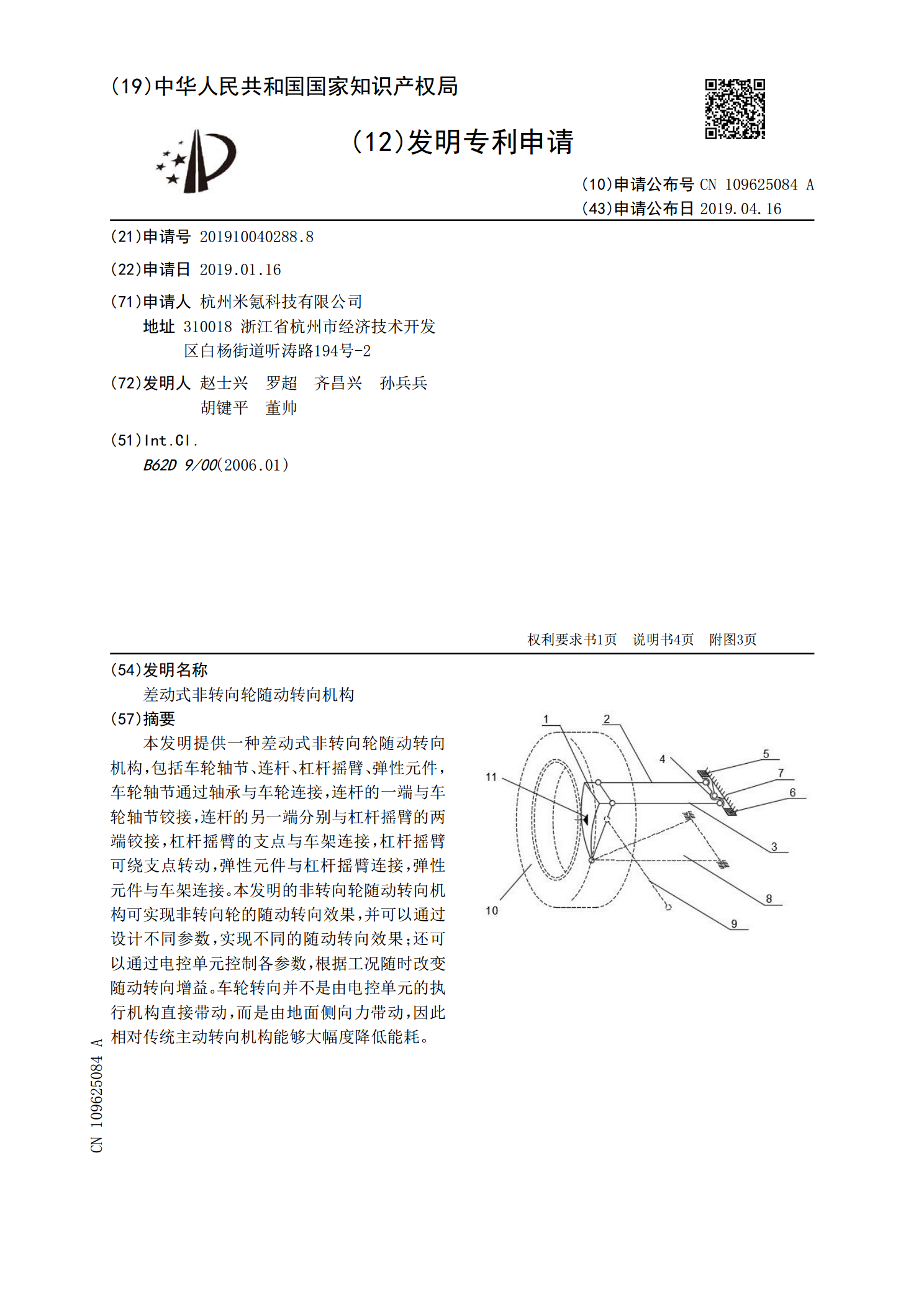
本发明提供一种差动式非转向轮随动转向机构,包括车轮轴节、连杆、杠杆摇臂、弹性元件,车轮轴节通过轴承与车轮连接,连杆的一端与车轮轴节铰接,连杆的另一端分别与杠杆摇臂的两端铰接,杠杆摇臂的支点与车架连接,杠杆摇臂可绕支点转动,弹性元件与杠杆摇臂连接,弹性元件与车架连接。本发明的非转向轮随动转向机构可实现非转向轮的随动转向效果,并可以通过设计不同参数,实现不同的随动转向效果;还可以通过电控单元控制各参数,根据工况随时改变随动转向增益。车轮转向并不是由电控单元的执行机构直接带动,而是由地面侧向力带动,因此相对传统

随动转向机构及使用该转向机构的独立悬架支撑桥.pdf
本发明涉及一种随动转向机构,包括左端用于与对应转向节总成铰接相连的左转向拉杆和右端用于与对应转向节总成铰接相连的右转向拉杆,所述的随动转向机构还包括设置于所述左、右转向拉杆之间且可左右摆动的铰接于相应底盘车架上的转向摇臂,所述左、右转向拉杆的相对端分别铰接于所述转向摇臂的左、右两侧,所述的随动转向机构还包括至少两个分别设置于所述转向摇臂的左右侧和相应底盘车架之间并向所述转向摇臂施加加载力以使所述转向摇臂被锁止进而使相应车轮沿直线行走的锁止缸。本发明提供了一种随动转向性可以控制的随动转向机构。
一种预压缩弹簧式后轮随动转向机构.pdf
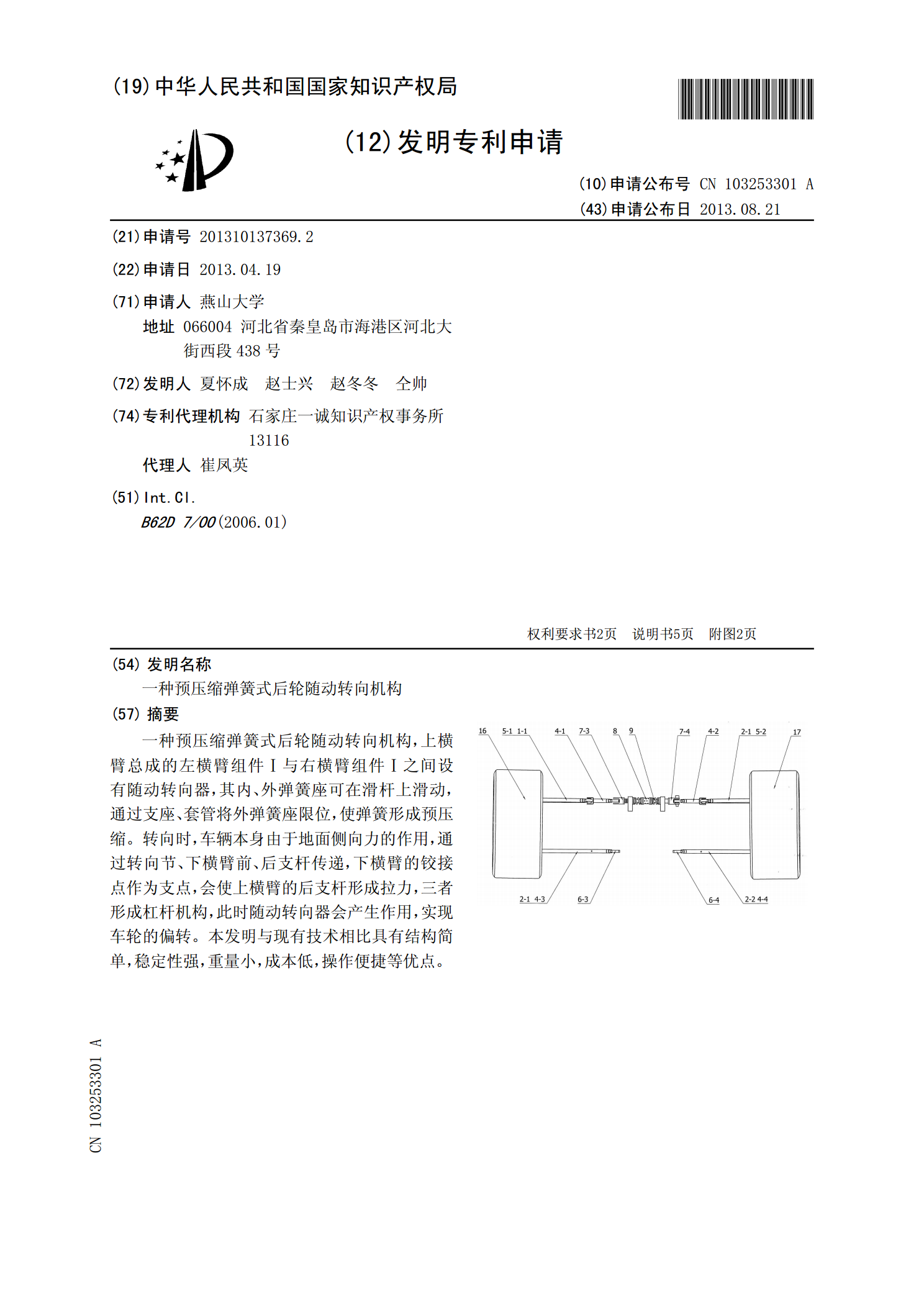
一种预压缩弹簧式后轮随动转向机构,上横臂总成的左横臂组件Ⅰ与右横臂组件Ⅰ之间设有随动转向器,其内、外弹簧座可在滑杆上滑动,通过支座、套管将外弹簧座限位,使弹簧形成预压缩。转向时,车辆本身由于地面侧向力的作用,通过转向节、下横臂前、后支杆传递,下横臂的铰接点作为支点,会使上横臂的后支杆形成拉力,三者形成杠杆机构,此时随动转向器会产生作用,实现车轮的偏转。本发明与现有技术相比具有结构简单,稳定性强,重量小,成本低,操作便捷等优点。

随动转向大灯.doc
项目立题:汽车随动转向大灯电子控制系统开发课题背景:随动转向大灯也被称之为自适应大灯(AdaptiveFrontlightingSystem)英文简称AFS,随动转向大灯能够不断对大灯进行动态调节,保持与汽车的当前行驶方向一致,以确保驾驶员在任何时刻都拥有最佳的可见度,而普通大灯具有固定的照射范围,当夜间汽车在弯道上转弯时,由于无法调节照明角度,常常会在弯道内侧出现“盲区”,极大地威胁了驾驶员夜间的安全驾车。随动转向大灯现状:凯旋:随动转向双氙气大灯目前在2.0L车型中,凯旋是唯一配备随动转向双氙气大灯的

一种拖车后轴的随动转向机构.pdf
一种拖车后轴的随动转向机构,包括后轴和两后车轮,两后车轮分别设置有转向臂,所述后轴的两端分别设置有延伸臂,所述转向臂通过转向轴与所述延伸臂活动连接,所述转向臂可以绕所述转向轴转动,两后车轮之间设置有转向拉杆,转向拉杆的两端分别与两转向臂连接;车辆转弯时拖车受到牵引车的拖拽,拖车受到转向力的作用,后车轮的转向臂绕转向轴转动,后车轮通过转向拉杆保持同步转向,因此,采用本发明后,车辆转弯时,轮胎与地面的摩擦减小,延长轮胎的使用寿命,同时也可以节省燃油的消耗。