
一种非拟人的体重支撑型下肢助力外骨骼.pdf

小长****6淑

1/10
2/10
3/10

4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种非拟人的体重支撑型下肢助力外骨骼.pdf
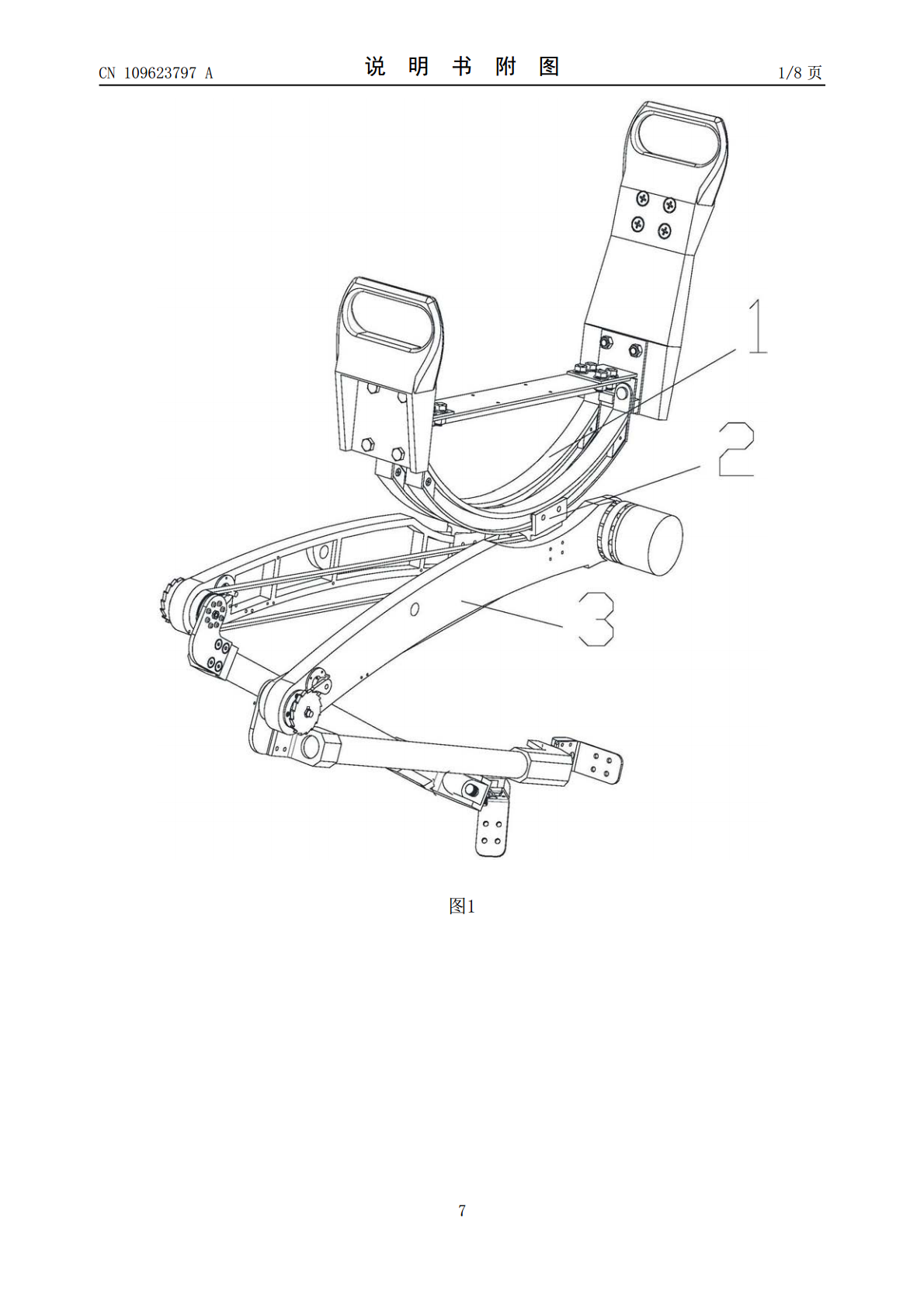
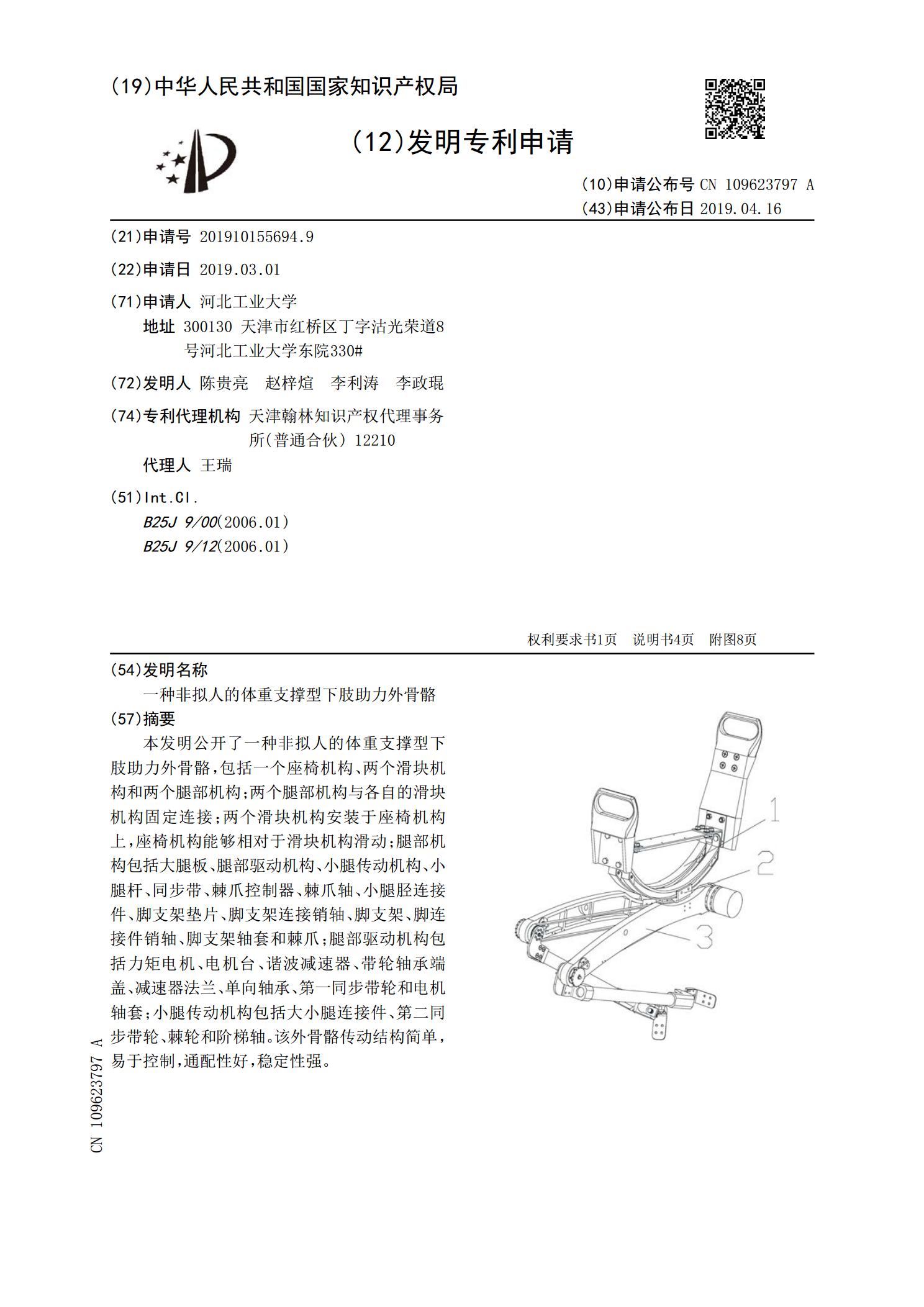
本发明公开了一种非拟人的体重支撑型下肢助力外骨骼,包括一个座椅机构、两个滑块机构和两个腿部机构;两个腿部机构与各自的滑块机构固定连接;两个滑块机构安装于座椅机构上,座椅机构能够相对于滑块机构滑动;腿部机构包括大腿板、腿部驱动机构、小腿传动机构、小腿杆、同步带、棘爪控制器、棘爪轴、小腿胫连接件、脚支架垫片、脚支架连接销轴、脚支架、脚连接件销轴、脚支架轴套和棘爪;腿部驱动机构包括力矩电机、电机台、谐波减速器、带轮轴承端盖、减速器法兰、单向轴承、第一同步带轮和电机轴套;小腿传动机构包括大小腿连接件、第二同步带轮
一种可支撑的下肢助力外骨骼.pdf
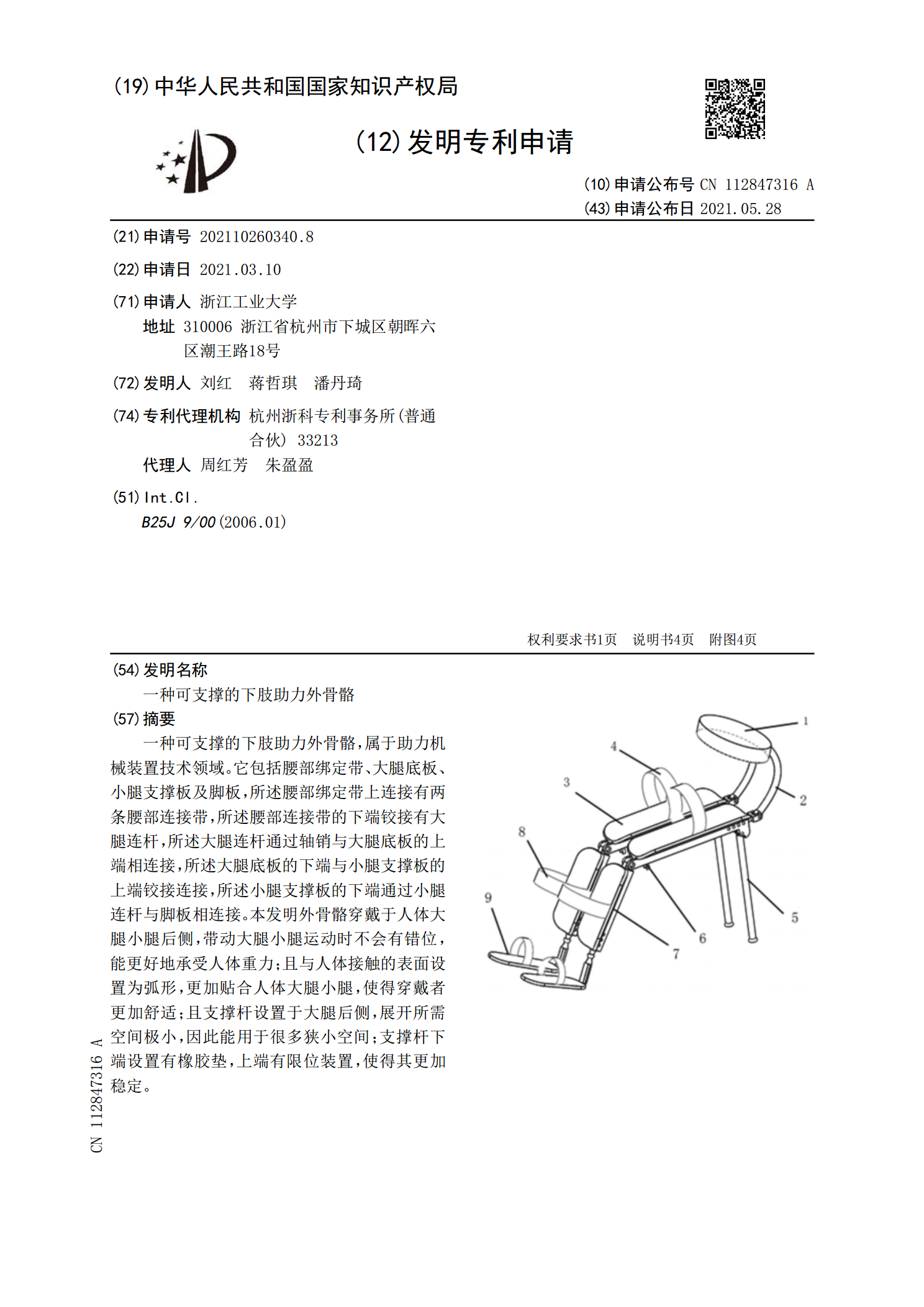
一种可支撑的下肢助力外骨骼,属于助力机械装置技术领域。它包括腰部绑定带、大腿底板、小腿支撑板及脚板,所述腰部绑定带上连接有两条腰部连接带,所述腰部连接带的下端铰接有大腿连杆,所述大腿连杆通过轴销与大腿底板的上端相连接,所述大腿底板的下端与小腿支撑板的上端铰接连接,所述小腿支撑板的下端通过小腿连杆与脚板相连接。本发明外骨骼穿戴于人体大腿小腿后侧,带动大腿小腿运动时不会有错位,能更好地承受人体重力;且与人体接触的表面设置为弧形,更加贴合人体大腿小腿,使得穿戴者更加舒适;且支撑杆设置于大腿后侧,展开所需空间极小
一种保持助力指向人体重心的下肢外骨骼座椅装置.pdf
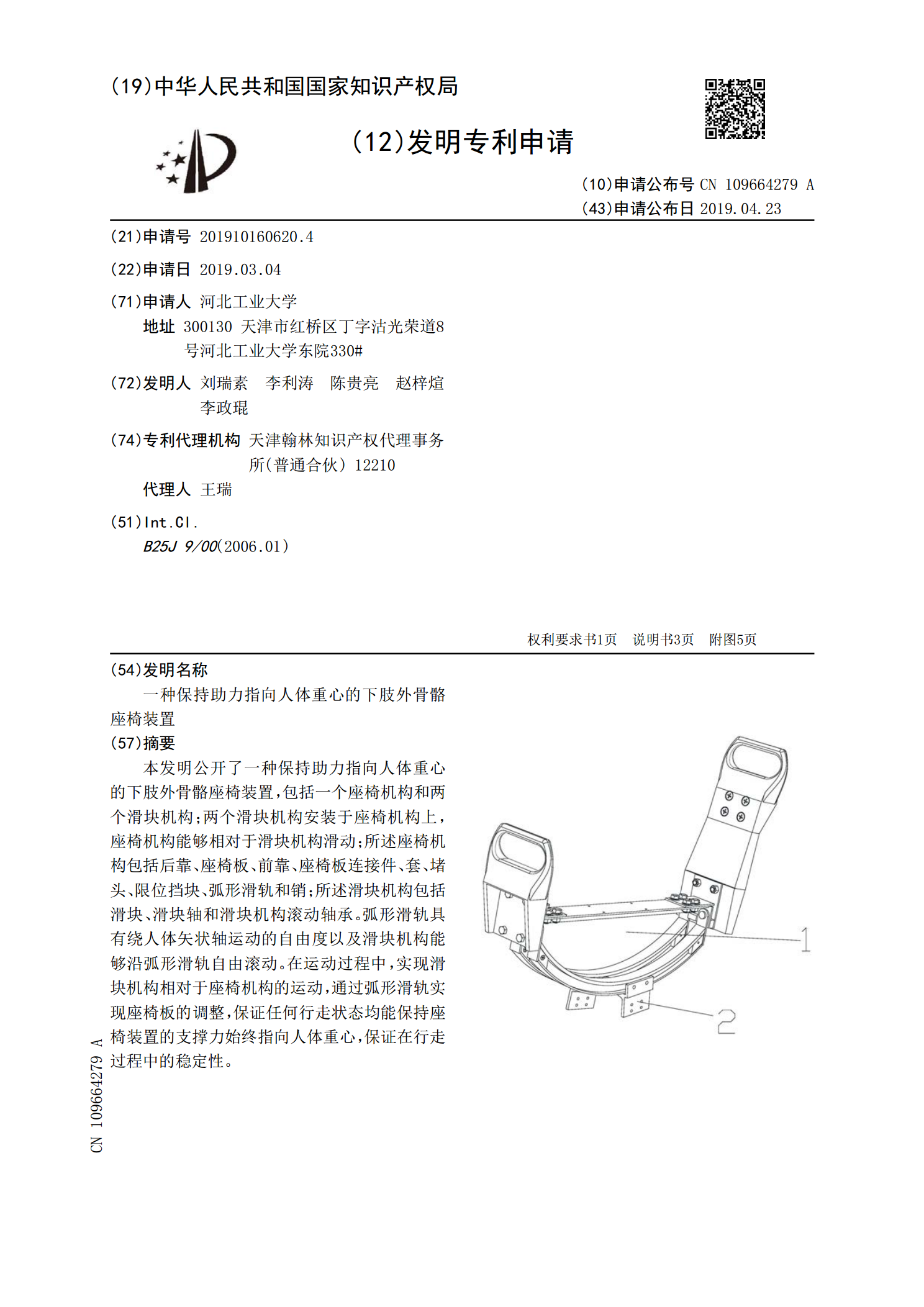
本发明公开了一种保持助力指向人体重心的下肢外骨骼座椅装置,包括一个座椅机构和两个滑块机构;两个滑块机构安装于座椅机构上,座椅机构能够相对于滑块机构滑动;所述座椅机构包括后靠、座椅板、前靠、座椅板连接件、套、堵头、限位挡块、弧形滑轨和销;所述滑块机构包括滑块、滑块轴和滑块机构滚动轴承。弧形滑轨具有绕人体矢状轴运动的自由度以及滑块机构能够沿弧形滑轨自由滚动。在运动过程中,实现滑块机构相对于座椅机构的运动,通过弧形滑轨实现座椅板的调整,保证任何行走状态均能保持座椅装置的支撑力始终指向人体重心,保证在行走过程中的
一种软性下肢助力外骨骼.pdf
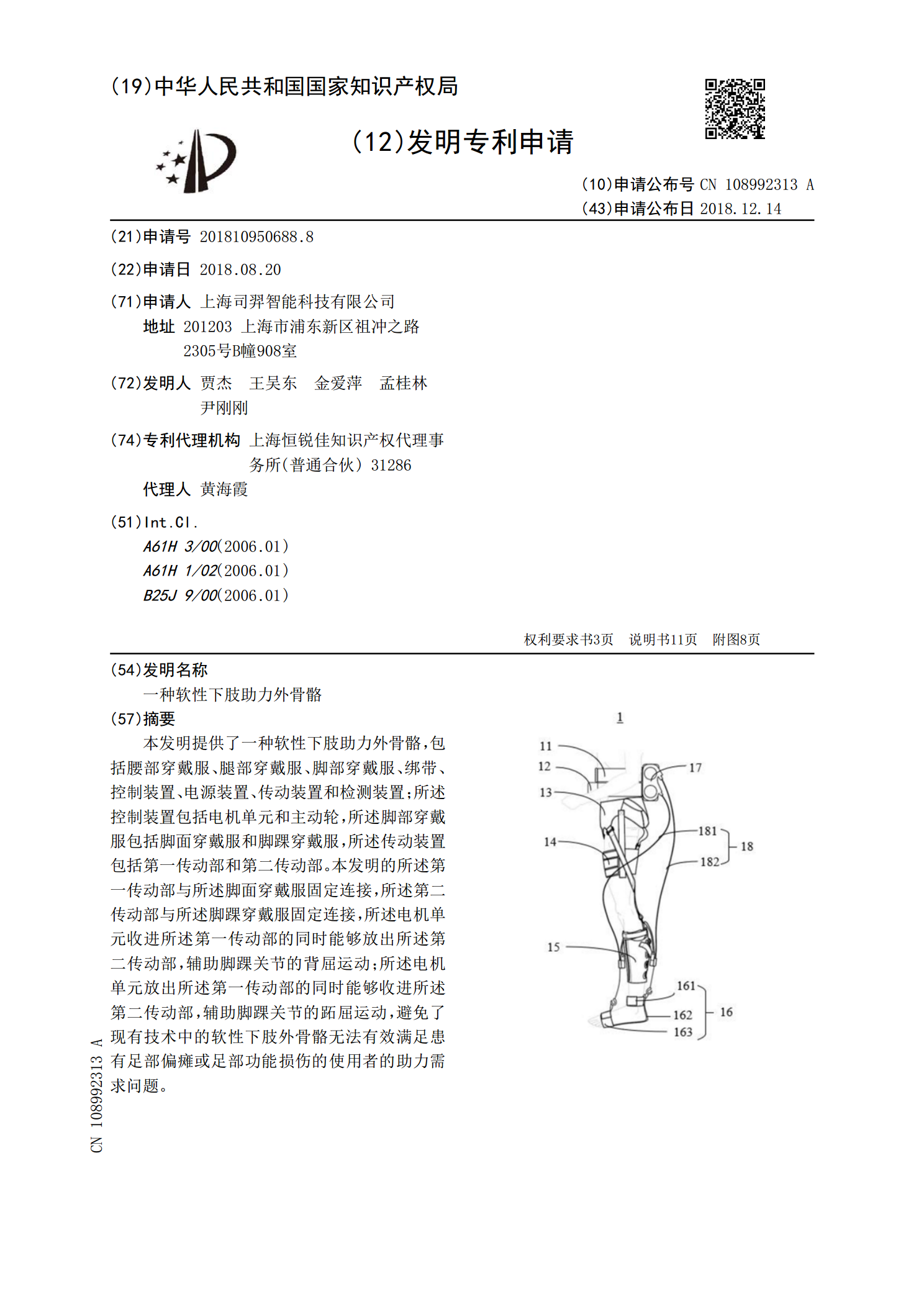
本发明提供了一种软性下肢助力外骨骼,包括腰部穿戴服、腿部穿戴服、脚部穿戴服、绑带、控制装置、电源装置、传动装置和检测装置;所述控制装置包括电机单元和主动轮,所述脚部穿戴服包括脚面穿戴服和脚踝穿戴服,所述传动装置包括第一传动部和第二传动部。本发明的所述第一传动部与所述脚面穿戴服固定连接,所述第二传动部与所述脚踝穿戴服固定连接,所述电机单元收进所述第一传动部的同时能够放出所述第二传动部,辅助脚踝关节的背屈运动;所述电机单元放出所述第一传动部的同时能够收进所述第二传动部,辅助脚踝关节的跖屈运动,避免了现有技术中

一种下肢外骨骼助力系统.pdf
本发明涉及机器人外骨骼技术领域,尤其涉及一种下肢外骨骼助力系统,包括,抬腿増力机构,抬腿増力机构位于下肢与固定部的连接处,所述抬腿増力机构包括第一杆件和第一电机,所述第一电机的中轴外侧壁上沿径向连接有第一杆件,第一杆件的内侧沿第一滑槽滑动连接有第一拨动杆,所述第一拨动杆由第一丝杆驱动,第一拨动杆用于按压下肢上连接板的一端;蹬腿増力机构,位于连接板的另一端,蹬腿増力机构用于对蹬腿时进行増力;二次増力机构,所述二次増力机构通过抬腿増力机构或蹬腿増力机构的拨动杆配合,进行力矩放大;通过调整驱动电机与下肢的联动位