
基于SMA驱动的仿蚯蚓蠕动式微型管道机器人的研究的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于SMA驱动的仿蚯蚓蠕动式微型管道机器人的研究的开题报告.docx
基于SMA驱动的仿蚯蚓蠕动式微型管道机器人的研究的开题报告一、研究背景和意义微型管道机器人是一种能够在体内或复杂载体中完成定向传输、目标检测和治疗的微小机器人,其特点是结构精细、操作精度高、适应性强、范围广泛。常用的微型管道机器人有液态机器人、软性机器人、铁磁粒子驱动机器人等,但这些机器人均存在一些缺陷,如流体机器人不能实现特定形状的运动,软性机器人易变形,铁磁粒子驱动机器人受到了磁场的限制等。因此,开发一种性能可靠的微型管道机器人成为了当前热门的研究方向。近年来,仿生学的思想引入到微型管道机器人的研究中
蠕动式微型管道机器人驱动行走机构.pdf
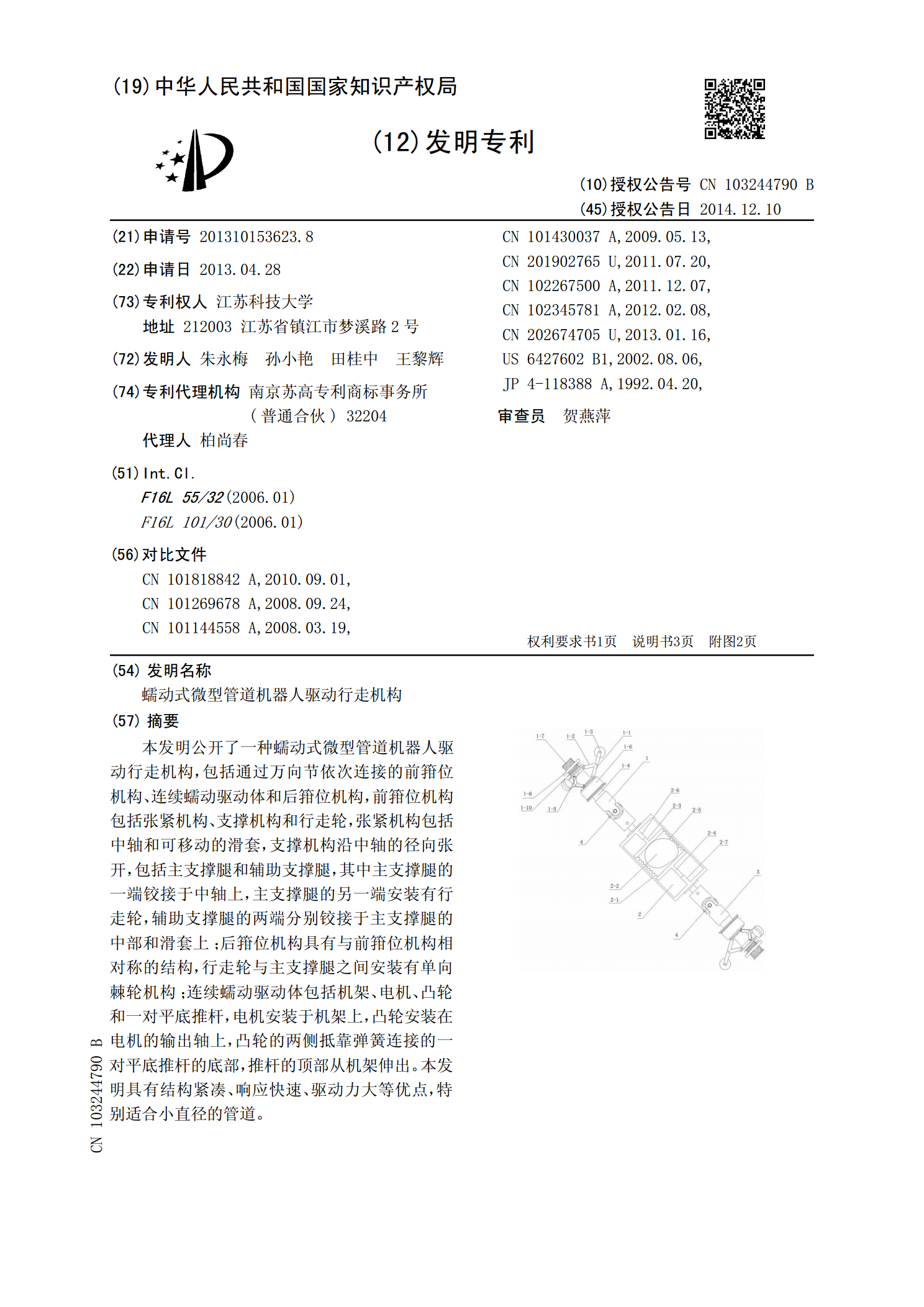
本发明公开了一种蠕动式微型管道机器人驱动行走机构,包括通过万向节依次连接的前箝位机构、连续蠕动驱动体和后箝位机构,前箝位机构包括张紧机构、支撑机构和行走轮,张紧机构包括中轴和可移动的滑套,支撑机构沿中轴的径向张开,包括主支撑腿和辅助支撑腿,其中主支撑腿的一端铰接于中轴上,主支撑腿的另一端安装有行走轮,辅助支撑腿的两端分别铰接于主支撑腿的中部和滑套上;后箝位机构具有与前箝位机构相对称的结构,行走轮与主支撑腿之间安装有单向棘轮机构;连续蠕动驱动体包括机架、电机、凸轮和一对平底推杆,电机安装于机架上,凸轮安装在

蠕动式管道机器人控制方法研究综述报告.docx
蠕动式管道机器人控制方法研究综述报告蠕动式管道机器人是一种能够在管道内进行自主移动的特殊机器人,近年来得到了越来越广泛的应用。与其他常规机器人相比,蠕动式管道机器人的优势主要在于可以在狭窄且复杂的管道内工作,具有较高的机动性和适应性,并且可以进行精确控制,满足各种工作要求。本文将就蠕动式管道机器人的控制方法进行综述。1.概述蠕动式管道机器人的控制方法主要有两种,一种是基于高级控制策略的方法,另一种是基于传统PID控制的方法。基于高级控制策略的方法相对于基于传统PID控制的方法具有更高的智能和自主性,更适合

仿蚯蚓蠕动进给机器人的计算机仿真.docx
仿蚯蚓蠕动进给机器人的计算机仿真摘要:本文以仿蚯蚓蠕动进给机器人的计算机仿真为主题,探讨了蚯蚓蠕动运动学特征及其在机器人运动中的应用。本文利用SolidWorks软件进行建模,采用ADAMS进行仿真分析,模拟出蚯蚓蠕动进给机器人的运动过程并对结果进行分析。本文研究表明,蚯蚓蠕动进给机器人可以节省能量,具有优异的运动特性,可以自适应不同场景的工作环境。关键词:蚯蚓蠕动;进给机器人;计算机仿真;运动学Abstract:Thispaperdiscussesthekinematiccharacteristicso

一种蠕动式管道机器人驱动行走机构.pdf
一种蠕动式管道机器人驱动行走机构。主要解决现有的管道内驱动行走机构托动力较小,难以驱动机器人在管道内较远距离行走的问题。其特征在于:所述机构由曲柄摇块机构和蜗轮蜗杆机构串联组合而成,皆以机器人机体为机架,在曲柄摇块机构中的连杆为弹性连杆结构,弹性连杆穿过绕机体摆动的摇快,与绕机体转动的蜗轮相连,构成曲柄摇块机构。前后有2组完全相同的该曲柄摇块机构。当电机带动蜗杆驱动蜗轮旋转时,连接在前后2组曲柄摇块机构上的行走足做平动。上述前后2组驱动行走部件沿蜗杆径向120o均匀分布,由一个蜗杆驱动。该驱动行走机构能够