
仿蚯蚓蠕动进给机器人的计算机仿真.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

仿蚯蚓蠕动进给机器人的计算机仿真.docx
仿蚯蚓蠕动进给机器人的计算机仿真摘要:本文以仿蚯蚓蠕动进给机器人的计算机仿真为主题,探讨了蚯蚓蠕动运动学特征及其在机器人运动中的应用。本文利用SolidWorks软件进行建模,采用ADAMS进行仿真分析,模拟出蚯蚓蠕动进给机器人的运动过程并对结果进行分析。本文研究表明,蚯蚓蠕动进给机器人可以节省能量,具有优异的运动特性,可以自适应不同场景的工作环境。关键词:蚯蚓蠕动;进给机器人;计算机仿真;运动学Abstract:Thispaperdiscussesthekinematiccharacteristicso

仿蚯蚓蠕动进给机器人的计算机仿真的任务书.docx
仿蚯蚓蠕动进给机器人的计算机仿真的任务书任务书题目:仿蚯蚓蠕动进给机器人的计算机仿真任务背景:随着工业自动化和智能化的发展,机器人在制造和生产领域中得到了广泛应用。机器人的进给精度和进给速度是制造和加工中一个非常关键的参数。在机器人进给过程中,仿照天然生物体的动态运动方式建立的仿生机器人逐渐成为研究热点之一。蚯蚓的蠕动运动就是一个非常适合用于仿生机器人设计的例子,其蠕动运动的前进速度和放松的灵活性可以很好地应用于机器人的机械手臂和进给结构。任务要求:本次任务要求以蚯蚓蠕动运动为模型,建立一种仿生机器人,其

基于SMA驱动的仿蚯蚓蠕动式微型管道机器人的研究的开题报告.docx
基于SMA驱动的仿蚯蚓蠕动式微型管道机器人的研究的开题报告一、研究背景和意义微型管道机器人是一种能够在体内或复杂载体中完成定向传输、目标检测和治疗的微小机器人,其特点是结构精细、操作精度高、适应性强、范围广泛。常用的微型管道机器人有液态机器人、软性机器人、铁磁粒子驱动机器人等,但这些机器人均存在一些缺陷,如流体机器人不能实现特定形状的运动,软性机器人易变形,铁磁粒子驱动机器人受到了磁场的限制等。因此,开发一种性能可靠的微型管道机器人成为了当前热门的研究方向。近年来,仿生学的思想引入到微型管道机器人的研究中
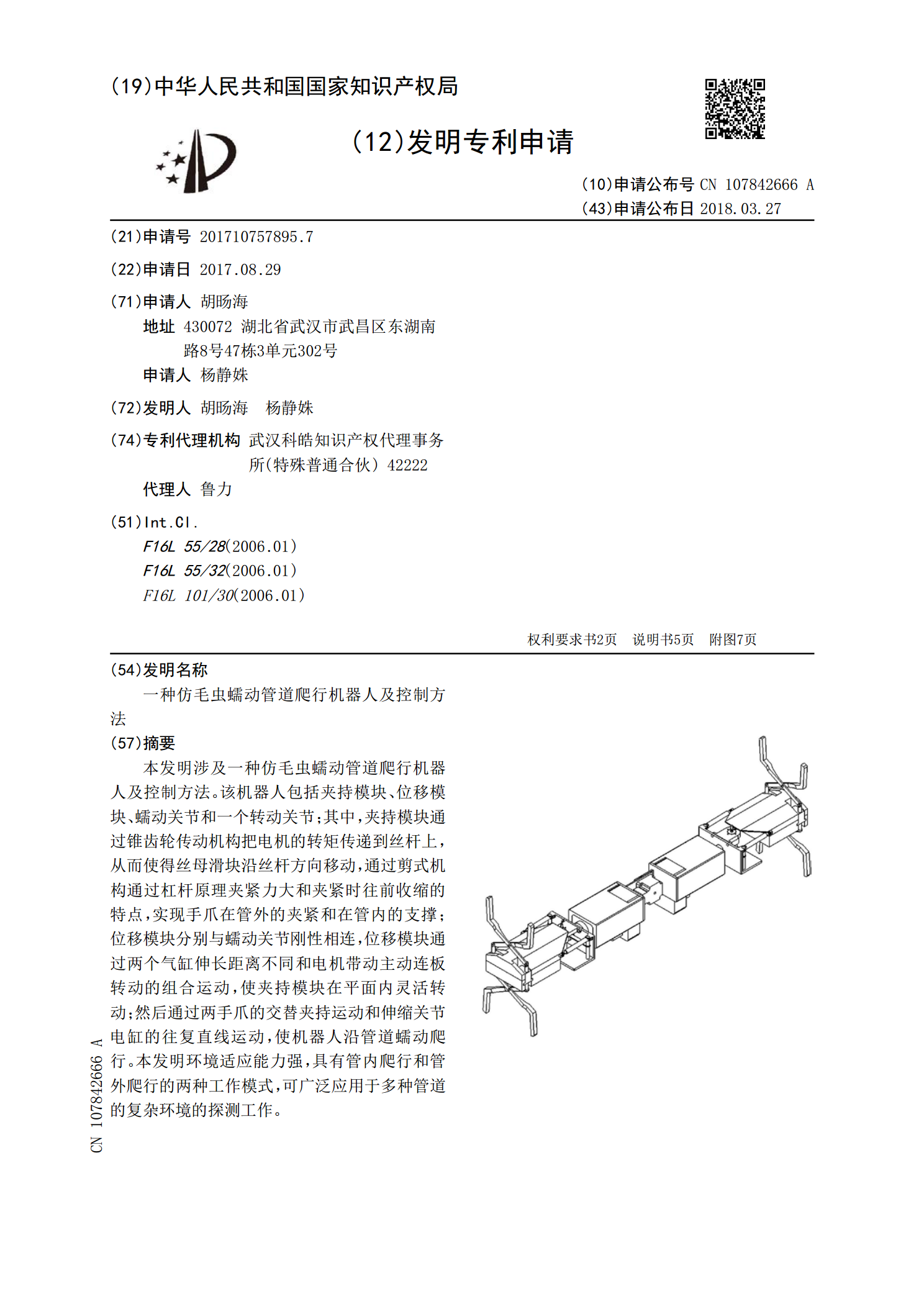
一种仿毛虫蠕动管道爬行机器人及控制方法.pdf
本发明涉及一种仿毛虫蠕动管道爬行机器人及控制方法。该机器人包括夹持模块、位移模块、蠕动关节和一个转动关节;其中,夹持模块通过锥齿轮传动机构把电机的转矩传递到丝杆上,从而使得丝母滑块沿丝杆方向移动,通过剪式机构通过杠杆原理夹紧力大和夹紧时往前收缩的特点,实现手爪在管外的夹紧和在管内的支撑;位移模块分别与蠕动关节刚性相连,位移模块通过两个气缸伸长距离不同和电机带动主动连板转动的组合运动,使夹持模块在平面内灵活转动;然后通过两手爪的交替夹持运动和伸缩关节电缸的往复直线运动,使机器人沿管道蠕动爬行。本发明环境适应
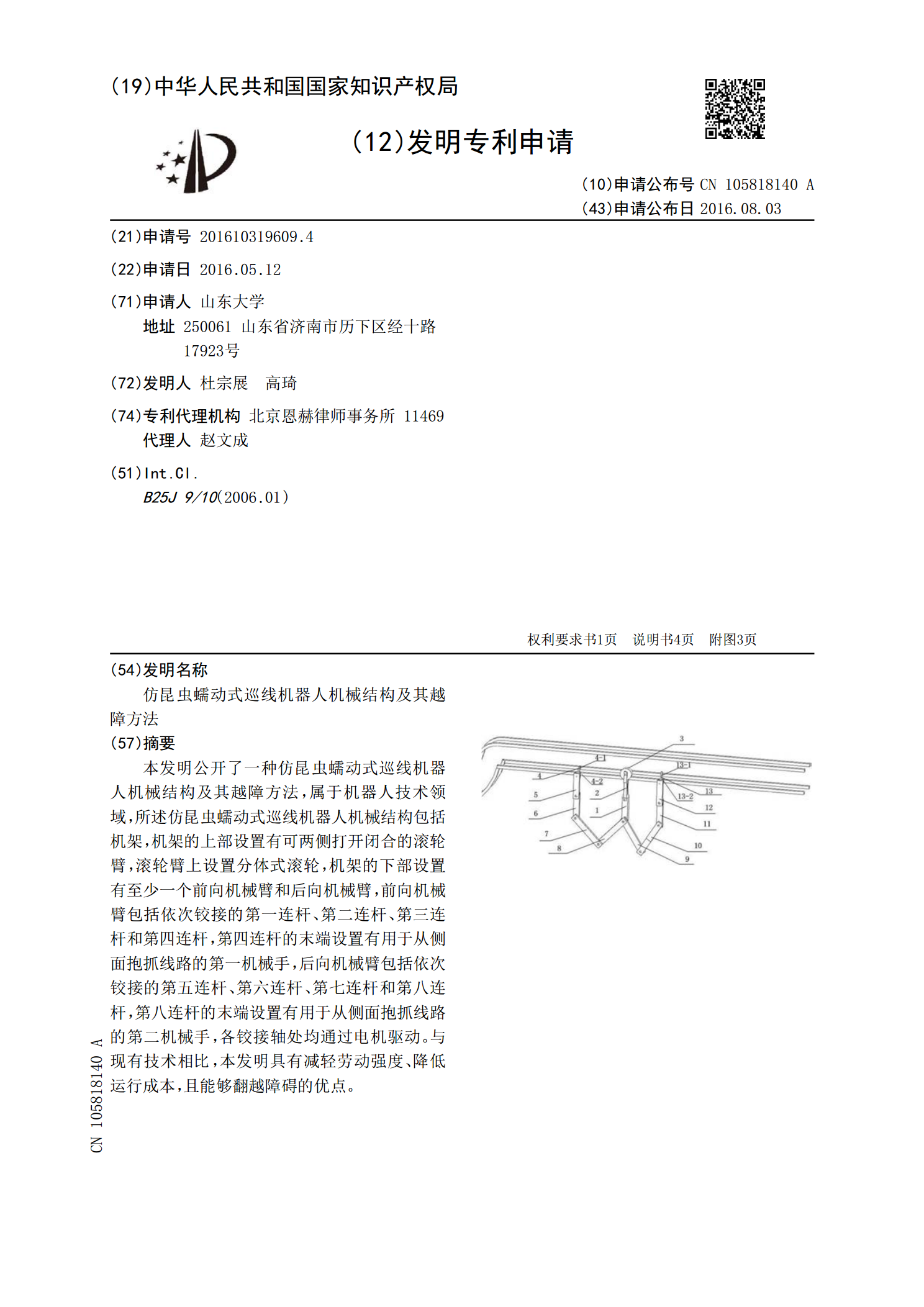
仿昆虫蠕动式巡线机器人机械结构及其越障方法.pdf
本发明公开了一种仿昆虫蠕动式巡线机器人机械结构及其越障方法,属于机器人技术领域,所述仿昆虫蠕动式巡线机器人机械结构包括机架,机架的上部设置有可两侧打开闭合的滚轮臂,滚轮臂上设置分体式滚轮,机架的下部设置有至少一个前向机械臂和后向机械臂,前向机械臂包括依次铰接的第一连杆、第二连杆、第三连杆和第四连杆,第四连杆的末端设置有用于从侧面抱抓线路的第一机械手,后向机械臂包括依次铰接的第五连杆、第六连杆、第七连杆和第八连杆,第八连杆的末端设置有用于从侧面抱抓线路的第二机械手,各铰接轴处均通过电机驱动。与现有技术相比,