
一种蠕动式管道机器人驱动行走机构.pdf

一只****生物


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种蠕动式管道机器人驱动行走机构.pdf
一种蠕动式管道机器人驱动行走机构。主要解决现有的管道内驱动行走机构托动力较小,难以驱动机器人在管道内较远距离行走的问题。其特征在于:所述机构由曲柄摇块机构和蜗轮蜗杆机构串联组合而成,皆以机器人机体为机架,在曲柄摇块机构中的连杆为弹性连杆结构,弹性连杆穿过绕机体摆动的摇快,与绕机体转动的蜗轮相连,构成曲柄摇块机构。前后有2组完全相同的该曲柄摇块机构。当电机带动蜗杆驱动蜗轮旋转时,连接在前后2组曲柄摇块机构上的行走足做平动。上述前后2组驱动行走部件沿蜗杆径向120o均匀分布,由一个蜗杆驱动。该驱动行走机构能够

一种蠕动式管道机器人驱动行走机构.pdf
(19)中华人民共和国国家知识产权局(12)发明专利说明书(10)申请公布号CN102644831A(43)申请公布日2012.08.22(21)申请号CN201210128494.2(22)申请日2012.04.27(71)申请人东北石油大学地址163318黑龙江省大庆市高新区发展路199号(72)发明人许冯平耿岱耿超赵琦夏友山(74)专利代理机构大庆知文知识产权代理有限公司代理人李建华(51)Int.CIF16L55/32权利要求说明书说明书幅图(54)发明名称一种蠕动式管道机器人驱动行走机构(57)

一种蠕动式管道驱动行走机构.pdf
一种蠕动式管道驱动行走机构。主要解决现有的管道驱动行走机构拖动力较小的问题。其特征在于:所述机构的驱动部分为不完全齿轮齿条机构,行走部分为曲柄摇杆机构,机体上开有纵向2条长条形槽,呈180°分布在机体的圆柱形表面;曲柄摇杆机构中的连杆为弹性连杆结构,连杆上装有行走足,弹性连杆穿过安装在机体上的滑块,与不完全齿轮相连,滑块与机体通过转动副相连接,每一个行走足通过两组曲柄摇杆机构相连接,通过不完全齿轮齿条将齿条的往复运动转换成回转运动。本种驱动行走机构能够提供多大的拖动力由连杆上的压簧刚度决定,当压簧刚度满足
蠕动式微型管道机器人驱动行走机构.pdf
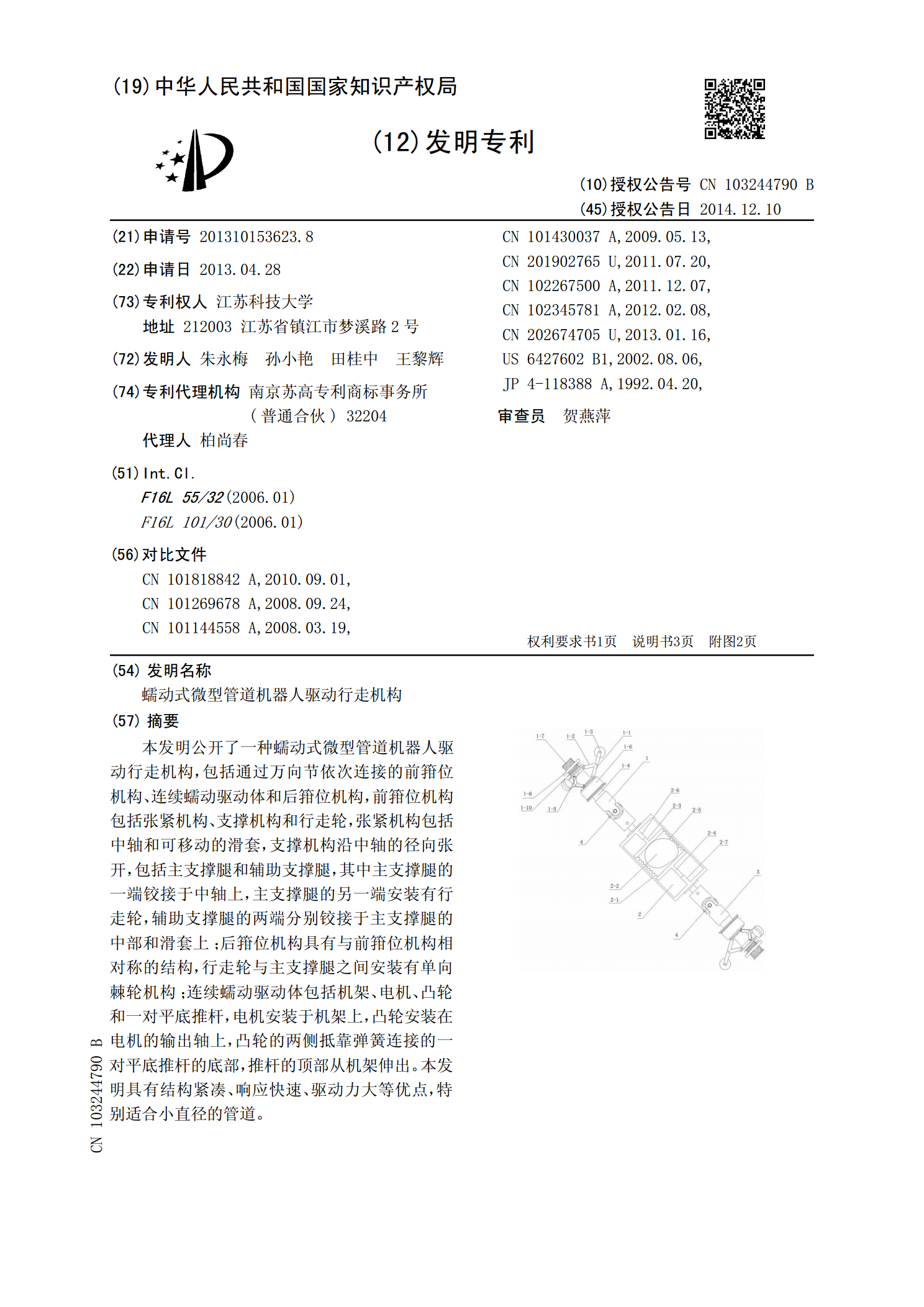
本发明公开了一种蠕动式微型管道机器人驱动行走机构,包括通过万向节依次连接的前箝位机构、连续蠕动驱动体和后箝位机构,前箝位机构包括张紧机构、支撑机构和行走轮,张紧机构包括中轴和可移动的滑套,支撑机构沿中轴的径向张开,包括主支撑腿和辅助支撑腿,其中主支撑腿的一端铰接于中轴上,主支撑腿的另一端安装有行走轮,辅助支撑腿的两端分别铰接于主支撑腿的中部和滑套上;后箝位机构具有与前箝位机构相对称的结构,行走轮与主支撑腿之间安装有单向棘轮机构;连续蠕动驱动体包括机架、电机、凸轮和一对平底推杆,电机安装于机架上,凸轮安装在
一种蠕动式管道机器人.pdf
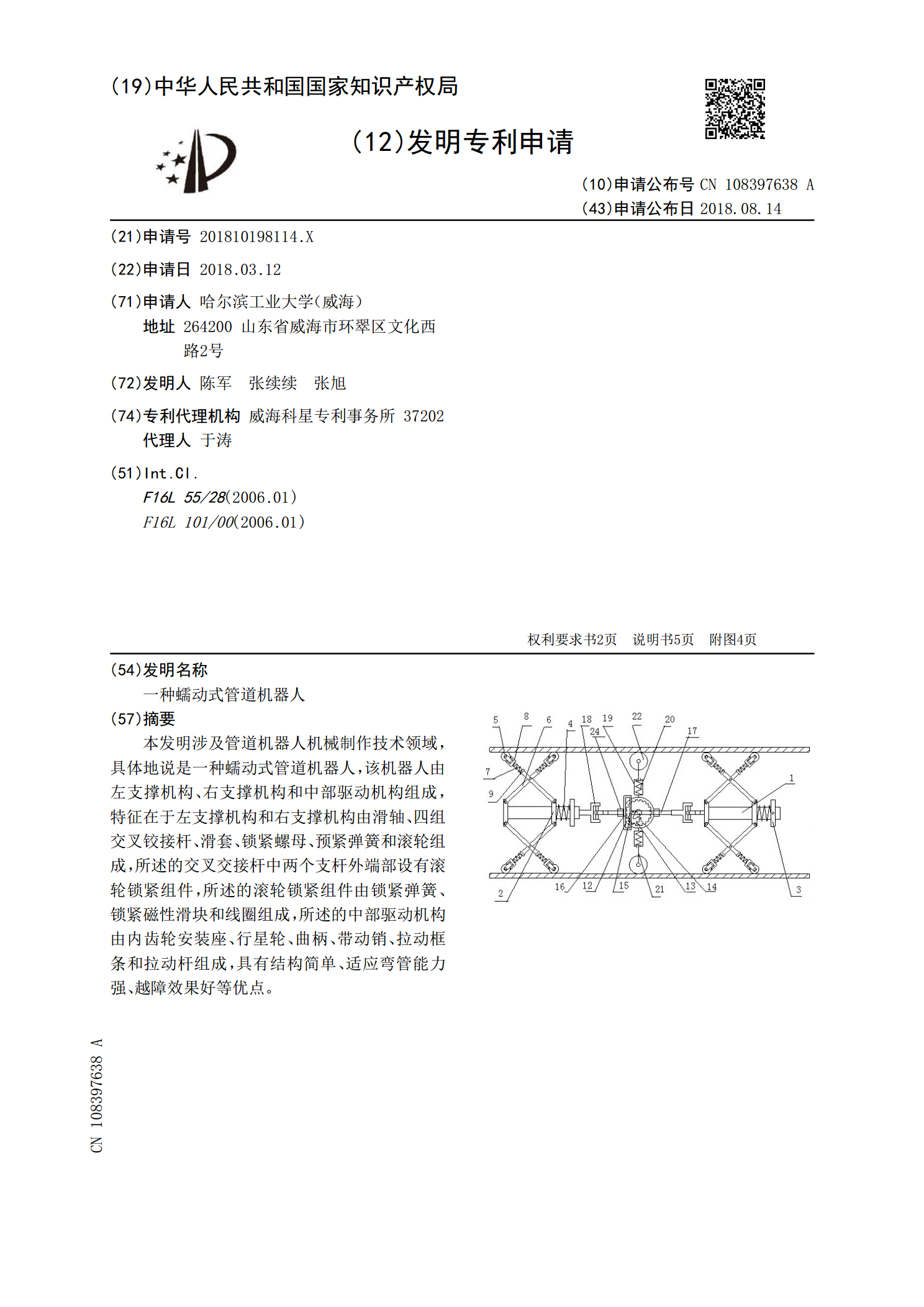
本发明涉及管道机器人机械制作技术领域,具体地说是一种蠕动式管道机器人,该机器人由左支撑机构、右支撑机构和中部驱动机构组成,特征在于左支撑机构和右支撑机构由滑轴、四组交叉铰接杆、滑套、锁紧螺母、预紧弹簧和滚轮组成,所述的交叉交接杆中两个支杆外端部设有滚轮锁紧组件,所述的滚轮锁紧组件由锁紧弹簧、锁紧磁性滑块和线圈组成,所述的中部驱动机构由内齿轮安装座、行星轮、曲柄、带动销、拉动框条和拉动杆组成,具有结构简单、适应弯管能力强、越障效果好等优点。