
蠕动式微型管道机器人驱动行走机构.pdf

是你****韵呀


1/7

2/7
3/7

4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
蠕动式微型管道机器人驱动行走机构.pdf
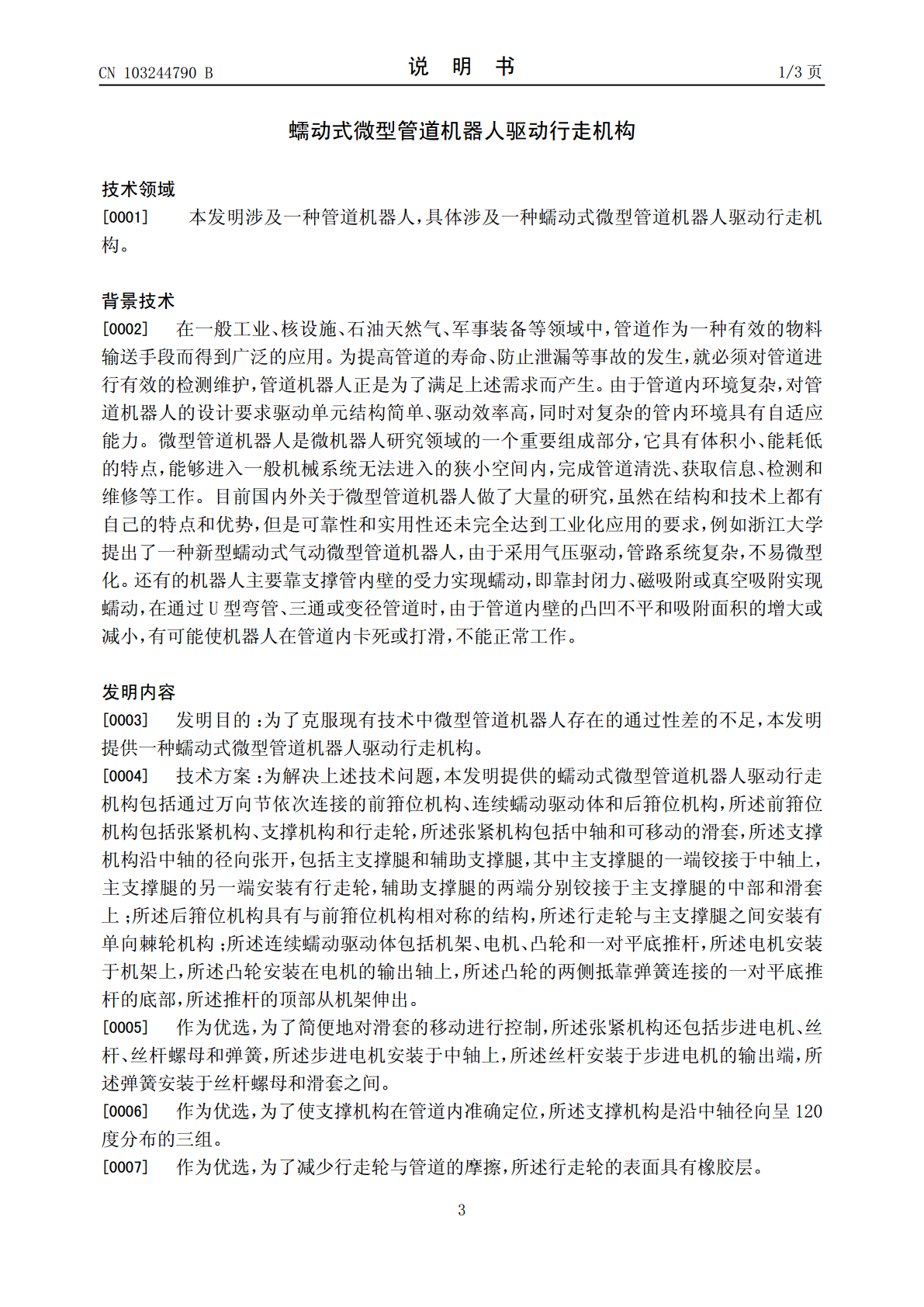
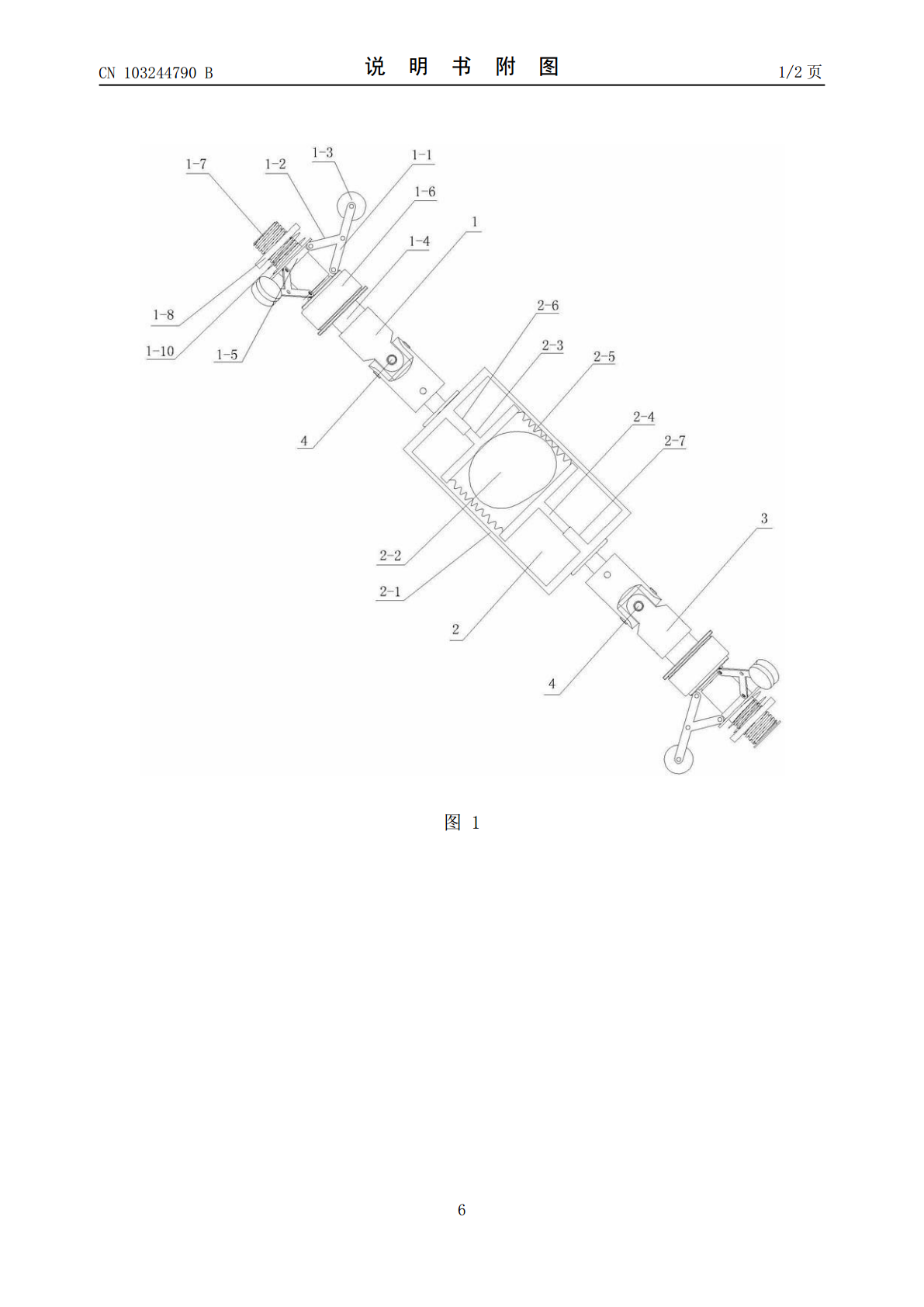
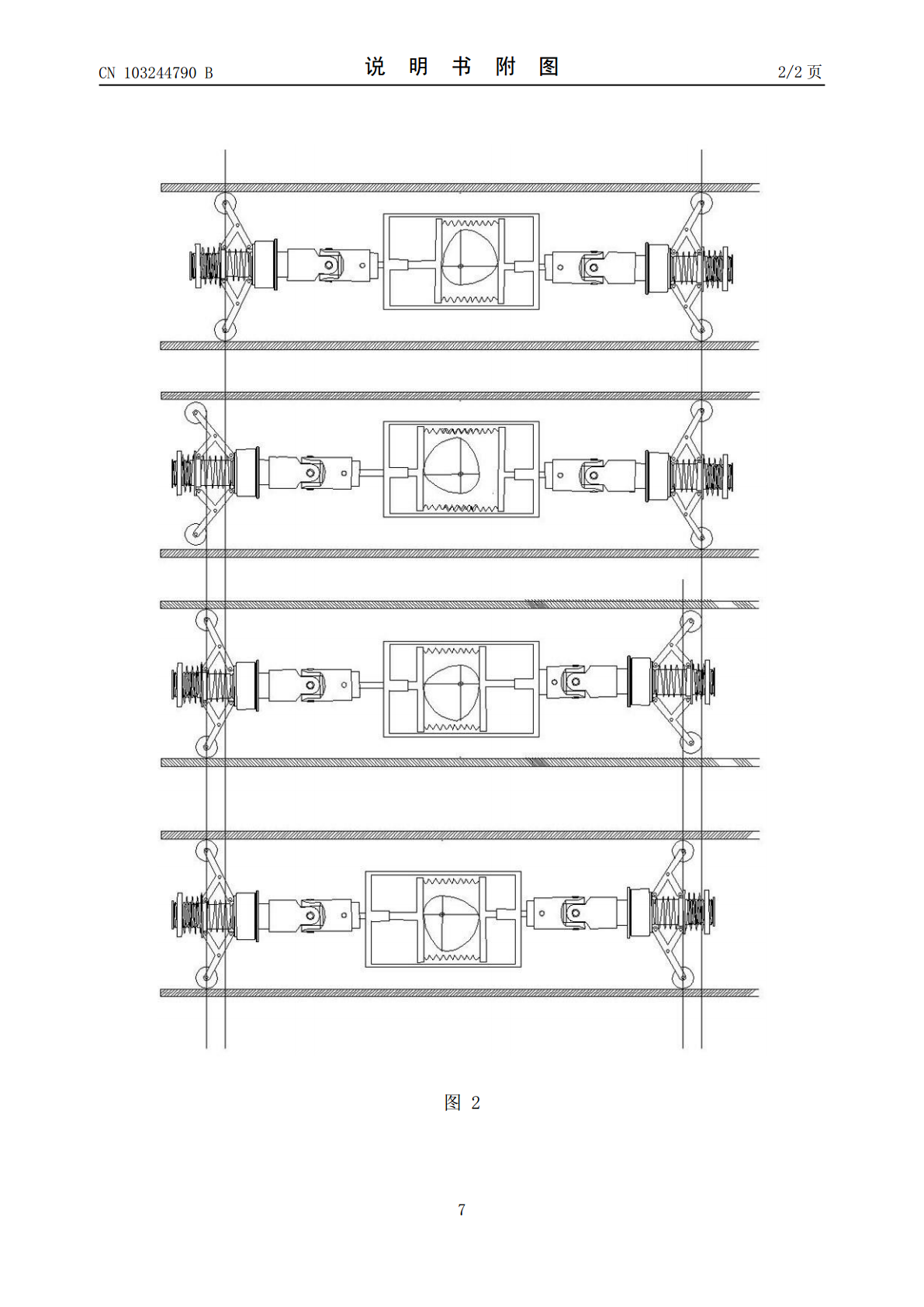
本发明公开了一种蠕动式微型管道机器人驱动行走机构,包括通过万向节依次连接的前箝位机构、连续蠕动驱动体和后箝位机构,前箝位机构包括张紧机构、支撑机构和行走轮,张紧机构包括中轴和可移动的滑套,支撑机构沿中轴的径向张开,包括主支撑腿和辅助支撑腿,其中主支撑腿的一端铰接于中轴上,主支撑腿的另一端安装有行走轮,辅助支撑腿的两端分别铰接于主支撑腿的中部和滑套上;后箝位机构具有与前箝位机构相对称的结构,行走轮与主支撑腿之间安装有单向棘轮机构;连续蠕动驱动体包括机架、电机、凸轮和一对平底推杆,电机安装于机架上,凸轮安装在

一种蠕动式管道机器人驱动行走机构.pdf
一种蠕动式管道机器人驱动行走机构。主要解决现有的管道内驱动行走机构托动力较小,难以驱动机器人在管道内较远距离行走的问题。其特征在于:所述机构由曲柄摇块机构和蜗轮蜗杆机构串联组合而成,皆以机器人机体为机架,在曲柄摇块机构中的连杆为弹性连杆结构,弹性连杆穿过绕机体摆动的摇快,与绕机体转动的蜗轮相连,构成曲柄摇块机构。前后有2组完全相同的该曲柄摇块机构。当电机带动蜗杆驱动蜗轮旋转时,连接在前后2组曲柄摇块机构上的行走足做平动。上述前后2组驱动行走部件沿蜗杆径向120o均匀分布,由一个蜗杆驱动。该驱动行走机构能够

一种蠕动式管道机器人驱动行走机构.pdf
(19)中华人民共和国国家知识产权局(12)发明专利说明书(10)申请公布号CN102644831A(43)申请公布日2012.08.22(21)申请号CN201210128494.2(22)申请日2012.04.27(71)申请人东北石油大学地址163318黑龙江省大庆市高新区发展路199号(72)发明人许冯平耿岱耿超赵琦夏友山(74)专利代理机构大庆知文知识产权代理有限公司代理人李建华(51)Int.CIF16L55/32权利要求说明书说明书幅图(54)发明名称一种蠕动式管道机器人驱动行走机构(57)

一种蠕动式管道驱动行走机构.pdf
一种蠕动式管道驱动行走机构。主要解决现有的管道驱动行走机构拖动力较小的问题。其特征在于:所述机构的驱动部分为不完全齿轮齿条机构,行走部分为曲柄摇杆机构,机体上开有纵向2条长条形槽,呈180°分布在机体的圆柱形表面;曲柄摇杆机构中的连杆为弹性连杆结构,连杆上装有行走足,弹性连杆穿过安装在机体上的滑块,与不完全齿轮相连,滑块与机体通过转动副相连接,每一个行走足通过两组曲柄摇杆机构相连接,通过不完全齿轮齿条将齿条的往复运动转换成回转运动。本种驱动行走机构能够提供多大的拖动力由连杆上的压簧刚度决定,当压簧刚度满足

基于SMA驱动的仿蚯蚓蠕动式微型管道机器人的研究的开题报告.docx
基于SMA驱动的仿蚯蚓蠕动式微型管道机器人的研究的开题报告一、研究背景和意义微型管道机器人是一种能够在体内或复杂载体中完成定向传输、目标检测和治疗的微小机器人,其特点是结构精细、操作精度高、适应性强、范围广泛。常用的微型管道机器人有液态机器人、软性机器人、铁磁粒子驱动机器人等,但这些机器人均存在一些缺陷,如流体机器人不能实现特定形状的运动,软性机器人易变形,铁磁粒子驱动机器人受到了磁场的限制等。因此,开发一种性能可靠的微型管道机器人成为了当前热门的研究方向。近年来,仿生学的思想引入到微型管道机器人的研究中