
蠕动式管道机器人控制方法研究综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

蠕动式管道机器人控制方法研究综述报告.docx
蠕动式管道机器人控制方法研究综述报告蠕动式管道机器人是一种能够在管道内进行自主移动的特殊机器人,近年来得到了越来越广泛的应用。与其他常规机器人相比,蠕动式管道机器人的优势主要在于可以在狭窄且复杂的管道内工作,具有较高的机动性和适应性,并且可以进行精确控制,满足各种工作要求。本文将就蠕动式管道机器人的控制方法进行综述。1.概述蠕动式管道机器人的控制方法主要有两种,一种是基于高级控制策略的方法,另一种是基于传统PID控制的方法。基于高级控制策略的方法相对于基于传统PID控制的方法具有更高的智能和自主性,更适合

蠕动式管道机器人控制方法研究任务书.docx
蠕动式管道机器人控制方法研究任务书任务书一、研究背景蠕动式管道机器人是一种能够在管道内部进行运动和操作的特殊机器人,具有较好的通过性和适应性,广泛应用于工业、石油、化工等领域。蠕动式管道机器人在管道内部行进时与管壁间的接触力是进行运动的基础,因此控制蠕动式机器人运动的能力是至关重要的。二、研究目的本项研究的目的是探究蠕动式管道机器人控制方法,针对管道内部不同障碍物进行匹配,使机器人能够自主、稳定地移动和操作,提高其运动效率和智能化水平。三、研究内容1.蠕动式管道机器人的工作原理及结构特点。2.研究蠕动式管
一种蠕动管道机器人的控制方法及蠕动管道机器人.pdf
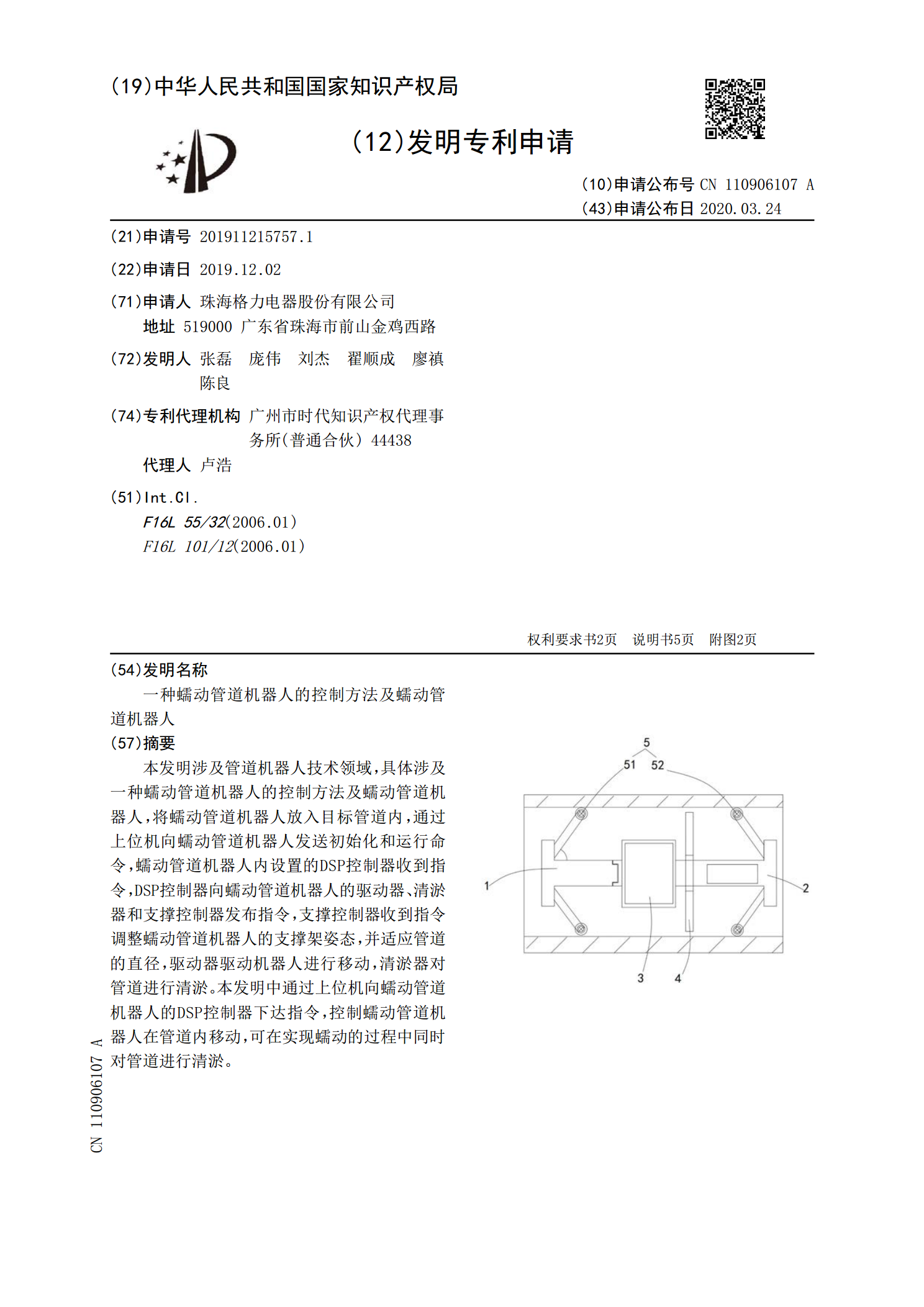
本发明涉及管道机器人技术领域,具体涉及一种蠕动管道机器人的控制方法及蠕动管道机器人,将蠕动管道机器人放入目标管道内,通过上位机向蠕动管道机器人发送初始化和运行命令,蠕动管道机器人内设置的DSP控制器收到指令,DSP控制器向蠕动管道机器人的驱动器、清淤器和支撑控制器发布指令,支撑控制器收到指令调整蠕动管道机器人的支撑架姿态,并适应管道的直径,驱动器驱动机器人进行移动,清淤器对管道进行清淤。本发明中通过上位机向蠕动管道机器人的DSP控制器下达指令,控制蠕动管道机器人在管道内移动,可在实现蠕动的过程中同时对管道

全驱蠕动式管道机器人.pdf
本发明的全驱蠕动式管道机器人包括单元节和连接单元节的万向节,单元节包括安装架、轮腿组件、锁止组件和传动组件,轮腿组件、锁止组件和传动组件安装于安装架上,其中轮腿组件用于支撑机器人在管道内壁行走,锁止组件用于锁定单元节,传动组件用于根据电机驱动带动锁止组件动作和单元节相对运动。有益效果在于:单元节中采用的具有内外螺纹的螺管和传动丝杆与锁紧架配合,通过电机驱动其正反转,实现了前后单元节交替锁止。并使机器人产生伸缩前进或后退运动。本发明采用单电机驱动方式,有效的减少了动力源,缩小了机器人体积,减小了能耗,使之更

蠕动式管道机器人载体系统及其作业方法.pdf
本发明涉及一种蠕动式管道机器人载体系统及其作业方法。载体系统包括清障爪,载体系统还包括外管、驱动组件和球轮,驱动组件包括依次连接的电机、链轮和链条,链条设置在外管的外壁,链条具有球体固定座;球轮与球体固定座配合形成万向轮结构。球轮与球体固定座配合形成万向轮结构使得载体系统可以沿工作管道以蠕动式移动,这样就可以轻松越过较大的障碍物,避免载体系统在工作管道内出现死机、无法正常工作的问题。