
一种取料机取料控制方法及装置.pdf

白凡****12


1/10
2/10

3/10
4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种取料机取料控制方法及装置.pdf
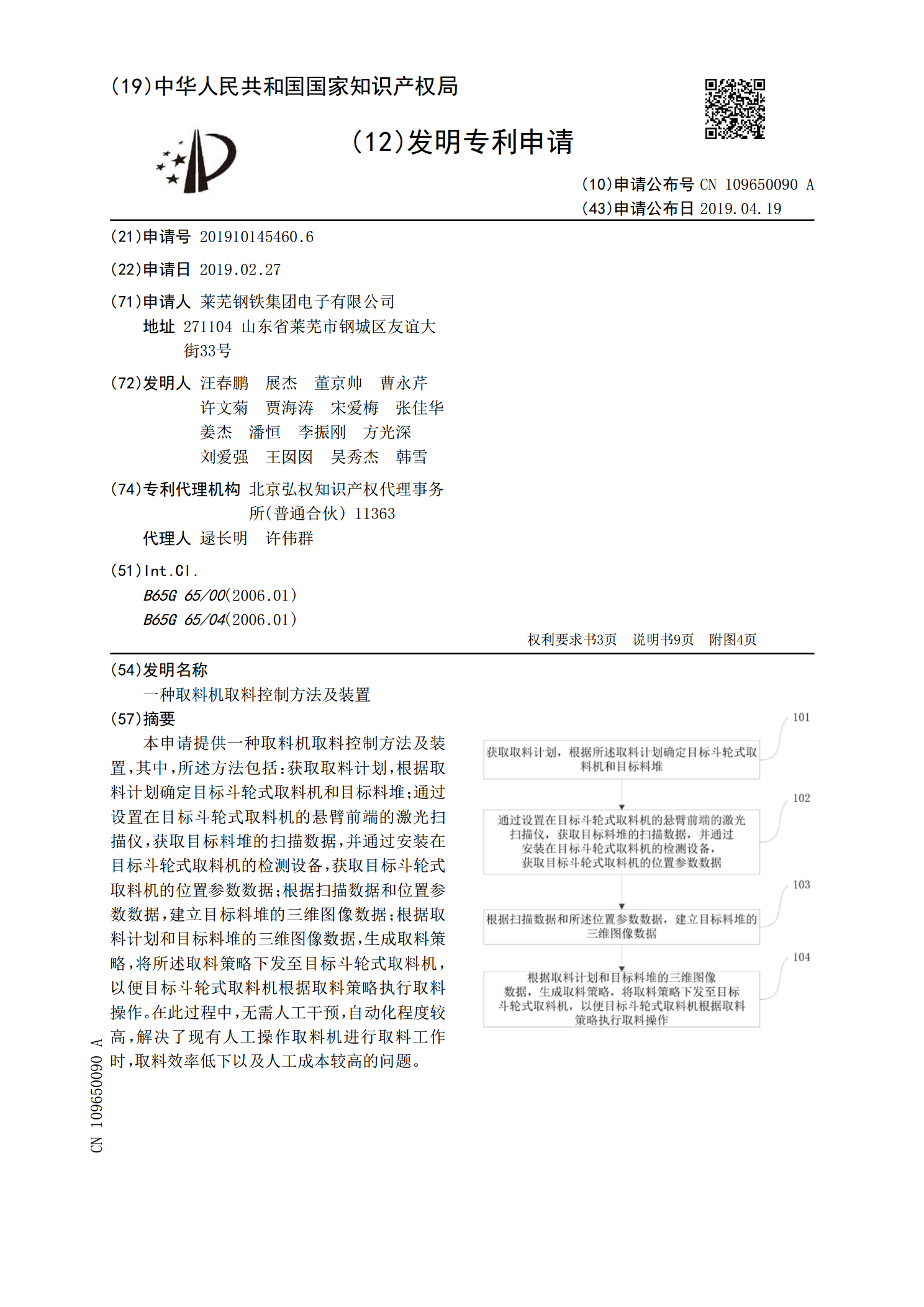
本申请提供一种取料机取料控制方法及装置,其中,所述方法包括:获取取料计划,根据取料计划确定目标斗轮式取料机和目标料堆;通过设置在目标斗轮式取料机的悬臂前端的激光扫描仪,获取目标料堆的扫描数据,并通过安装在目标斗轮式取料机的检测设备,获取目标斗轮式取料机的位置参数数据;根据扫描数据和位置参数数据,建立目标料堆的三维图像数据;根据取料计划和目标料堆的三维图像数据,生成取料策略,将所述取料策略下发至目标斗轮式取料机,以便目标斗轮式取料机根据取料策略执行取料操作。在此过程中,无需人工干预,自动化程度较高,解决了现

一种堆取料机的自动取料控制装置及方法.pdf
本发明揭示了一种堆取料机的自动取料控制装置及方法,由于本发明具有斗轮电机电流的采集功能,并建立了斗轮电机电流与斗轮取料量的关系模型以及斗轮取料量与悬臂回转电机频率的关系模型,这样在这些关系模型的作用下,自动取料时的悬臂回转速度(由悬臂回转电机频率决定),可由取料时的斗轮电机电流来控制,而斗轮电机电流又可准确、迅速地反映斗轮取料量,所以可有效形成一个闭环控制过程,可以很好的控制斗轮取料量。另外由于具有料堆边界判断功能,当每次取料到达料堆边界后,能够自动进行判断,并调整堆取料机位置,进入下次回转取料,如此反复
一种斗轮取料机取料控制方法及斗轮取料机.pdf
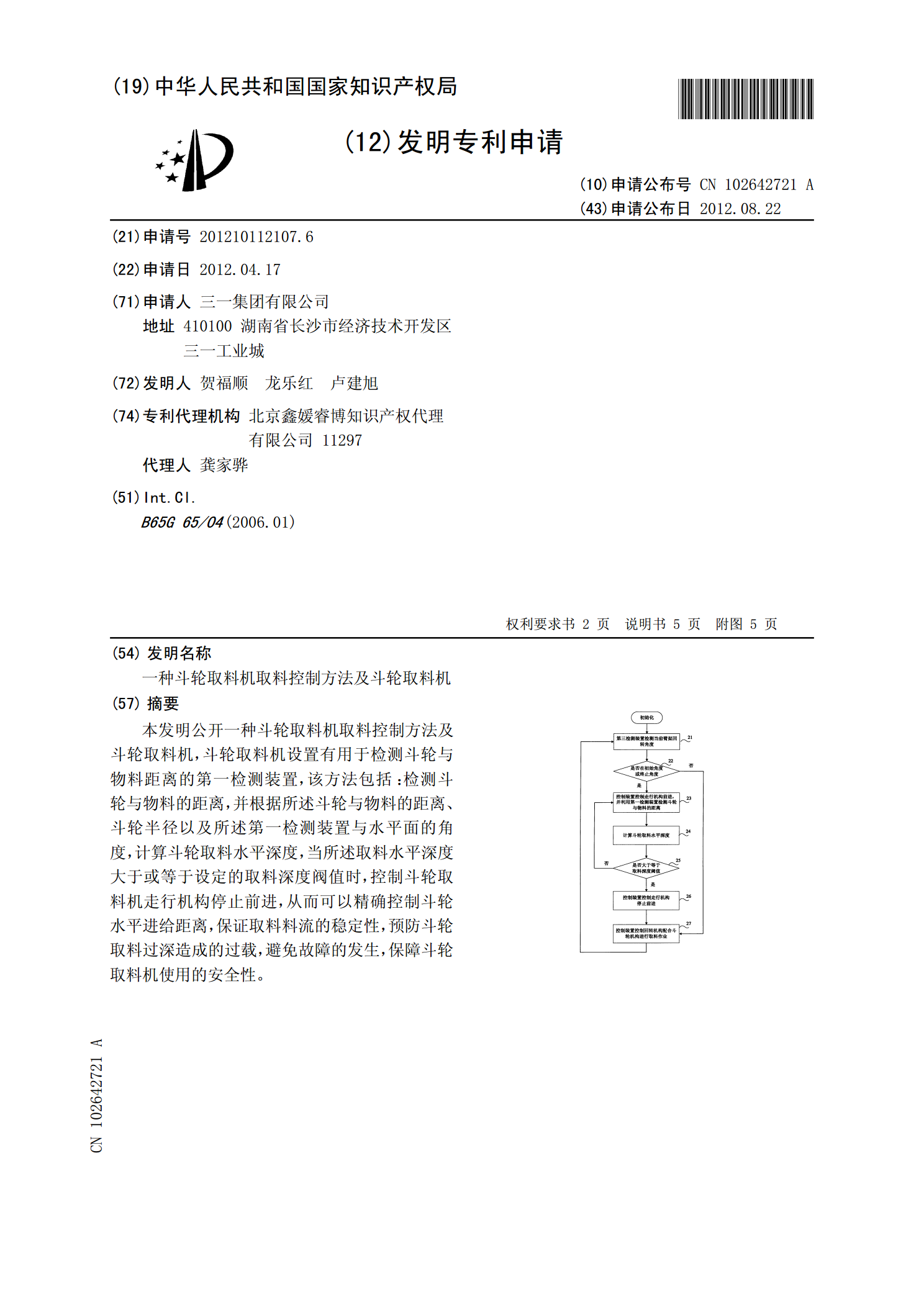
本发明公开一种斗轮取料机取料控制方法及斗轮取料机,斗轮取料机设置有用于检测斗轮与物料距离的第一检测装置,该方法包括:检测斗轮与物料的距离,并根据所述斗轮与物料的距离、斗轮半径以及所述第一检测装置与水平面的角度,计算斗轮取料水平深度,当所述取料水平深度大于或等于设定的取料深度阀值时,控制斗轮取料机走行机构停止前进,从而可以精确控制斗轮水平进给距离,保证取料料流的稳定性,预防斗轮取料过深造成的过载,避免故障的发生,保障斗轮取料机使用的安全性。
取料机斗轮机构的保护控制方法及装置、取料机.pdf
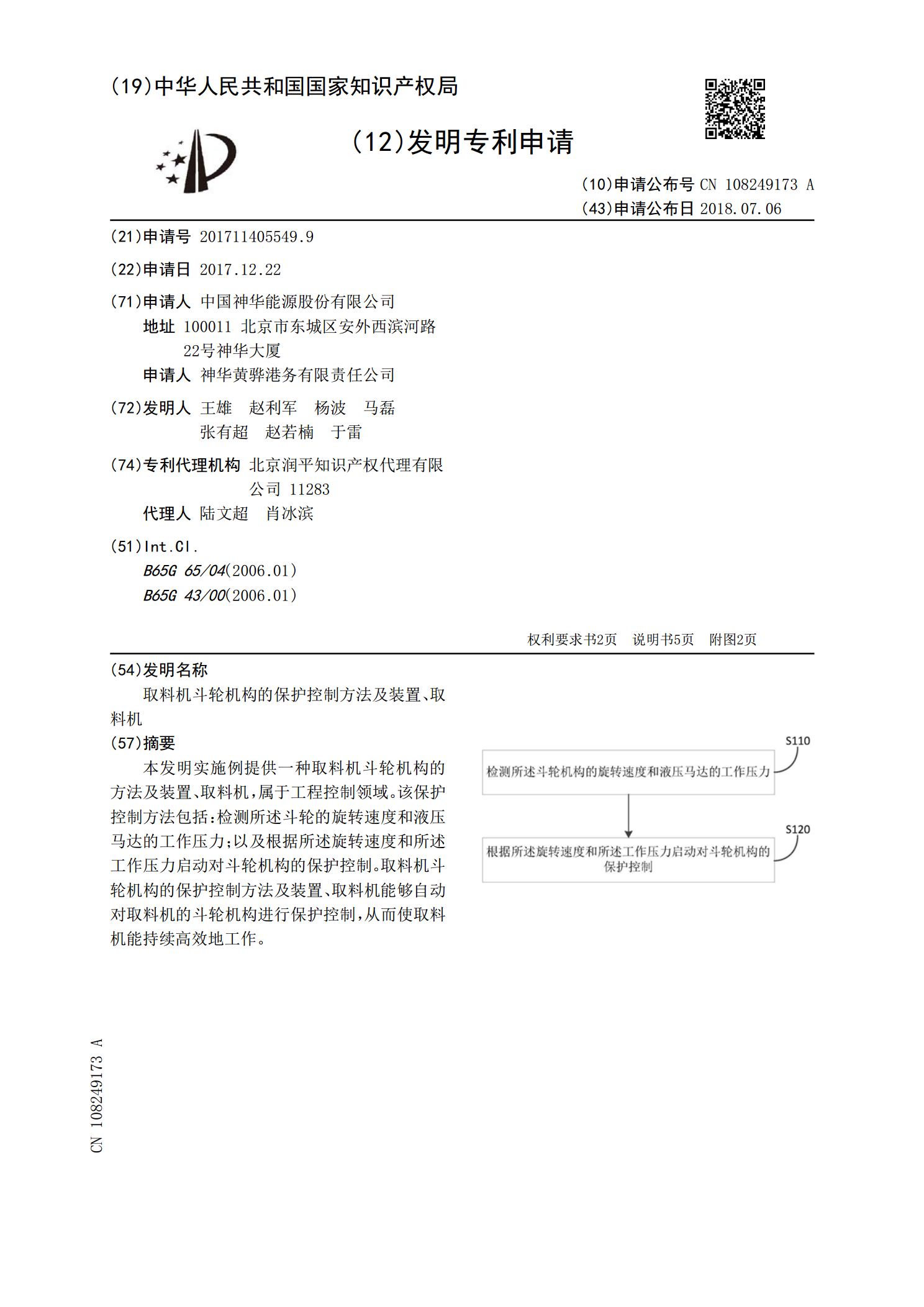
本发明实施例提供一种取料机斗轮机构的方法及装置、取料机,属于工程控制领域。该保护控制方法包括:检测所述斗轮的旋转速度和液压马达的工作压力;以及根据所述旋转速度和所述工作压力启动对斗轮机构的保护控制。取料机斗轮机构的保护控制方法及装置、取料机能够自动对取料机的斗轮机构进行保护控制,从而使取料机能持续高效地工作。
取料系统的取料控制方法及装置、取料机构、烹饪机构.pdf
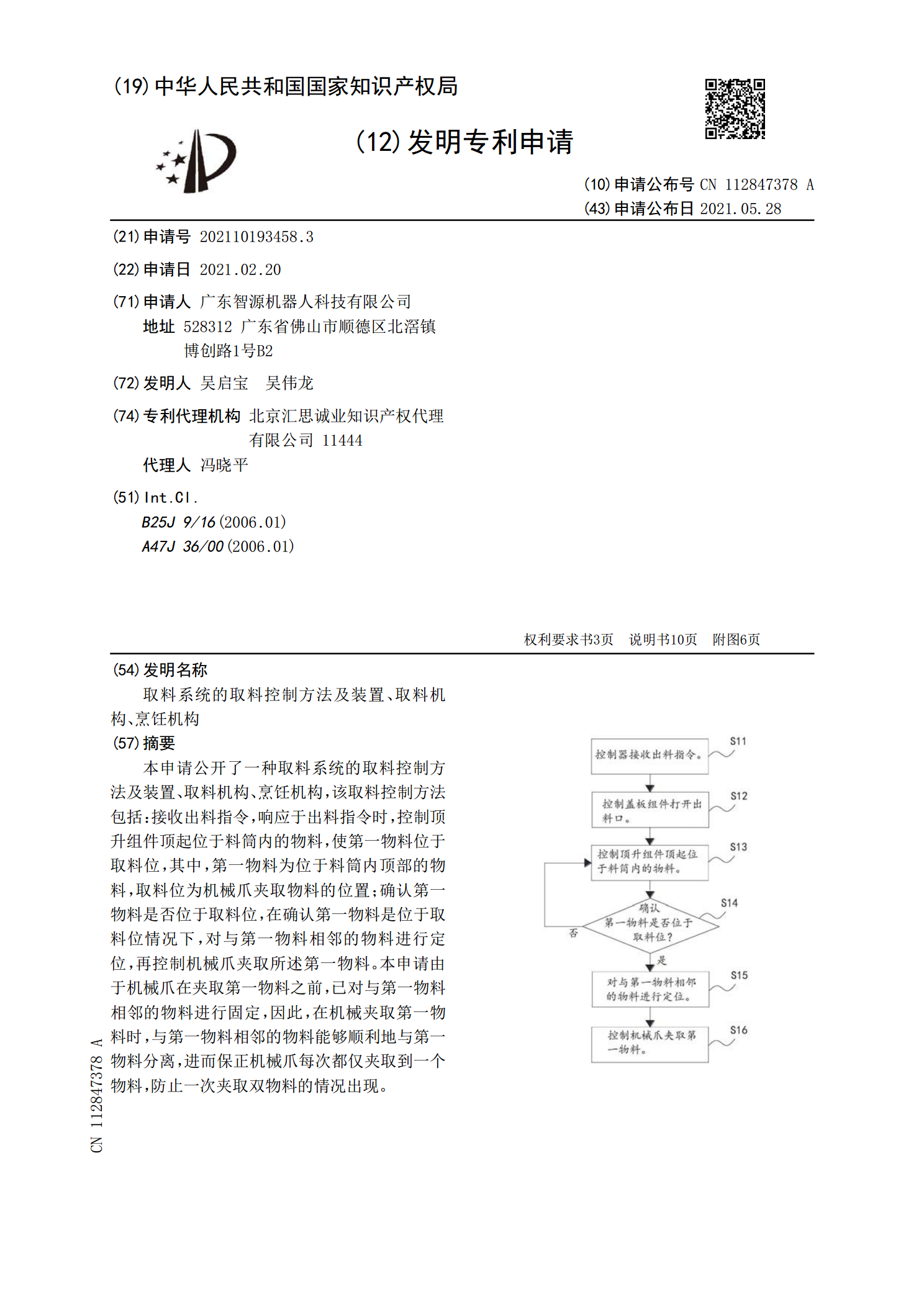
本申请公开了一种取料系统的取料控制方法及装置、取料机构、烹饪机构,该取料控制方法包括:接收出料指令,响应于出料指令时,控制顶升组件顶起位于料筒内的物料,使第一物料位于取料位,其中,第一物料为位于料筒内顶部的物料,取料位为机械爪夹取物料的位置;确认第一物料是否位于取料位,在确认第一物料是位于取料位情况下,对与第一物料相邻的物料进行定位,再控制机械爪夹取所述第一物料。本申请由于机械爪在夹取第一物料之前,已对与第一物料相邻的物料进行固定,因此,在机械夹取第一物料时,与第一物料相邻的物料能够顺利地与第一物料分离,