
取料系统的取料控制方法及装置、取料机构、烹饪机构.pdf

一条****杉淑

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
取料系统的取料控制方法及装置、取料机构、烹饪机构.pdf
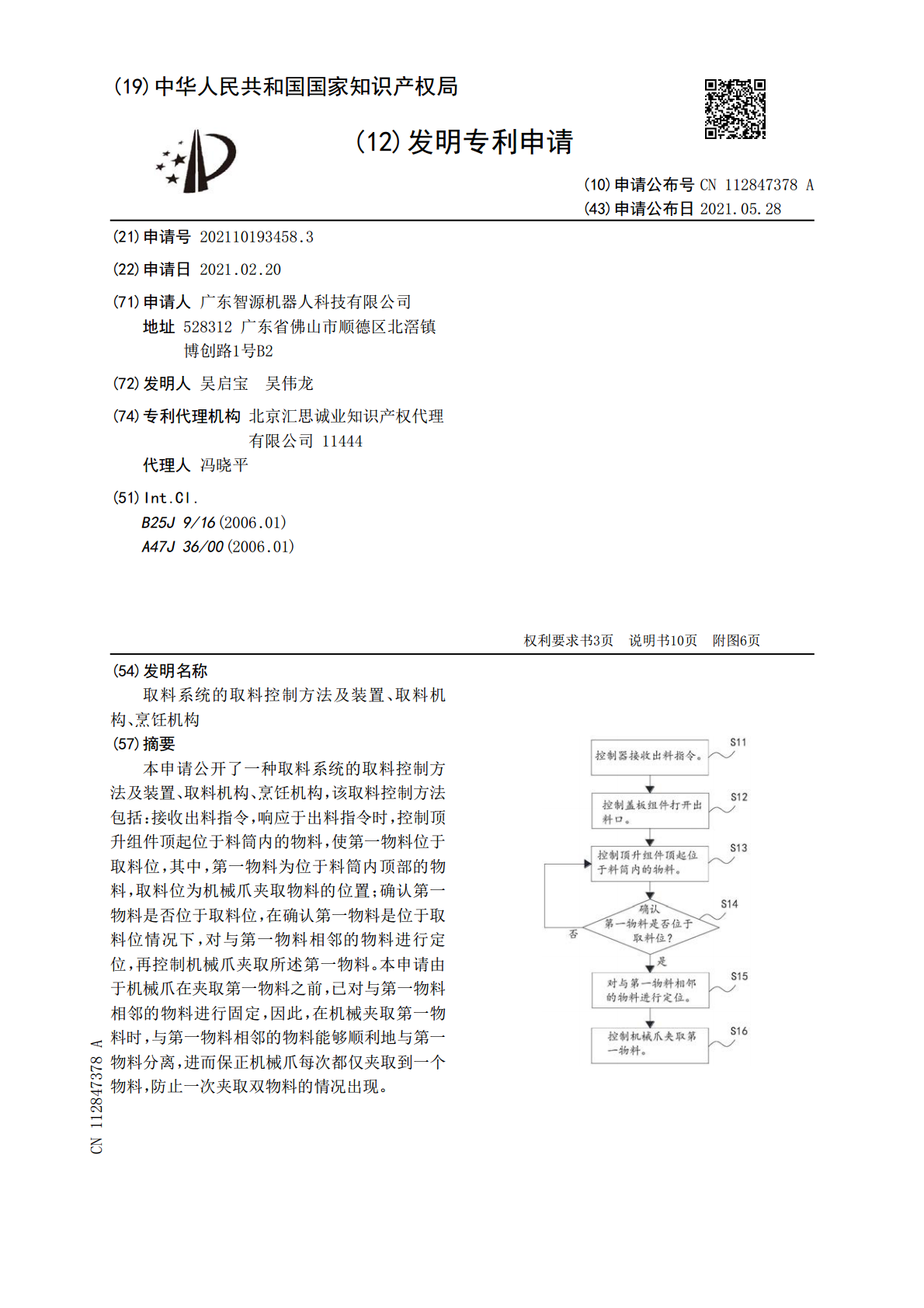
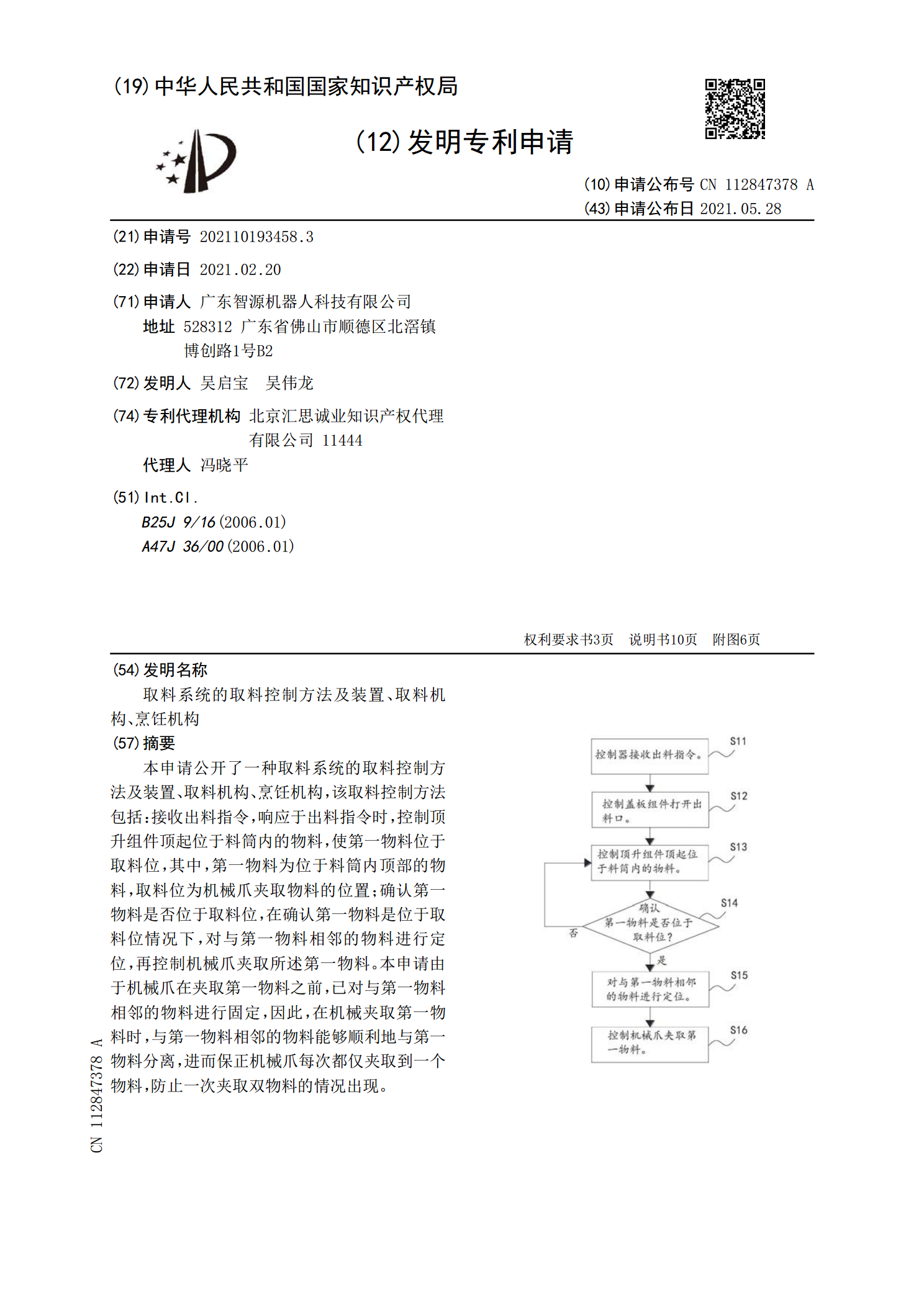
本申请公开了一种取料系统的取料控制方法及装置、取料机构、烹饪机构,该取料控制方法包括:接收出料指令,响应于出料指令时,控制顶升组件顶起位于料筒内的物料,使第一物料位于取料位,其中,第一物料为位于料筒内顶部的物料,取料位为机械爪夹取物料的位置;确认第一物料是否位于取料位,在确认第一物料是位于取料位情况下,对与第一物料相邻的物料进行定位,再控制机械爪夹取所述第一物料。本申请由于机械爪在夹取第一物料之前,已对与第一物料相邻的物料进行固定,因此,在机械夹取第一物料时,与第一物料相邻的物料能够顺利地与第一物料分离,
取料机斗轮机构的保护控制方法及装置、取料机.pdf
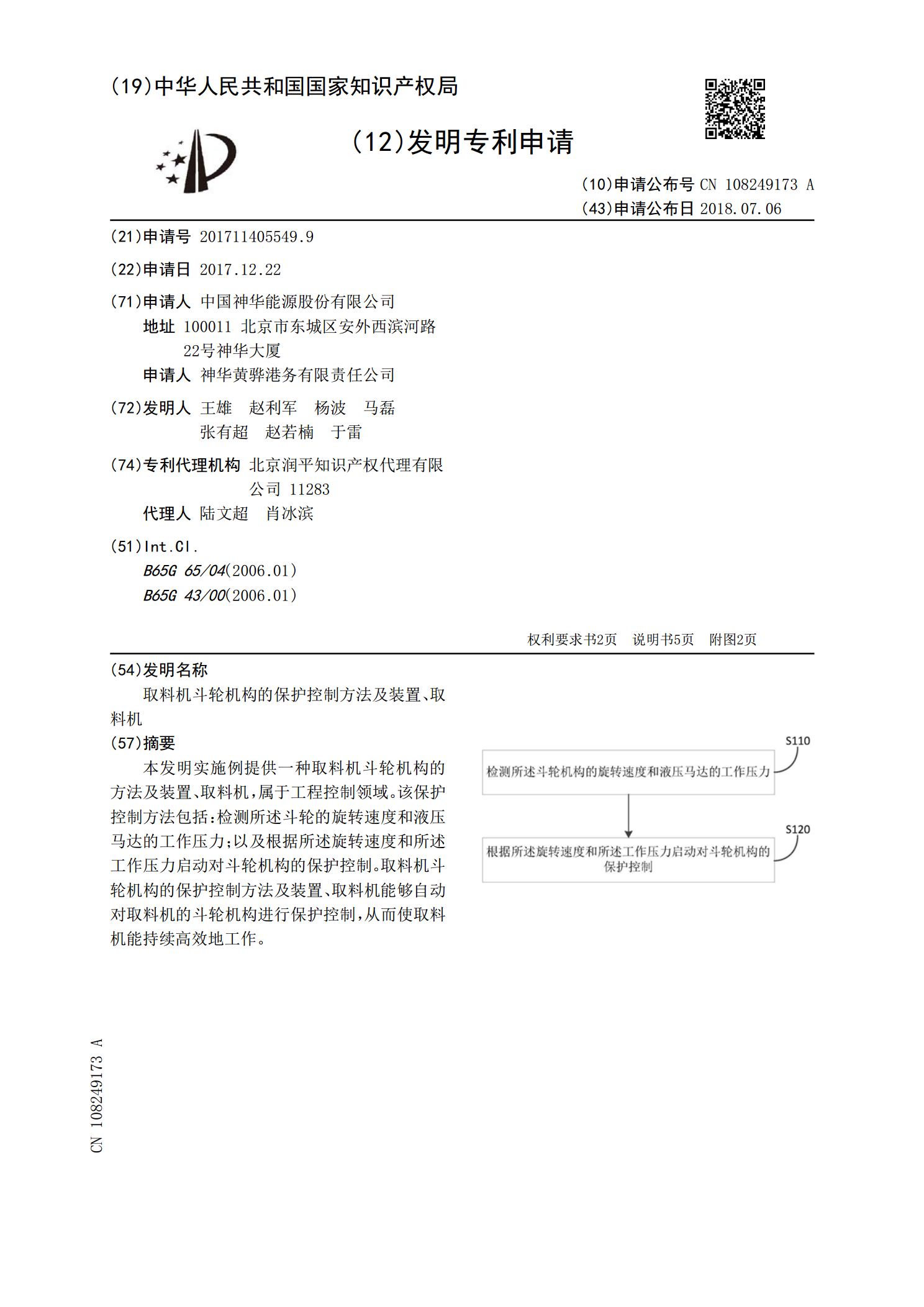
本发明实施例提供一种取料机斗轮机构的方法及装置、取料机,属于工程控制领域。该保护控制方法包括:检测所述斗轮的旋转速度和液压马达的工作压力;以及根据所述旋转速度和所述工作压力启动对斗轮机构的保护控制。取料机斗轮机构的保护控制方法及装置、取料机能够自动对取料机的斗轮机构进行保护控制,从而使取料机能持续高效地工作。
一种青贮饲料取料机的取料机构及取料方法.pdf
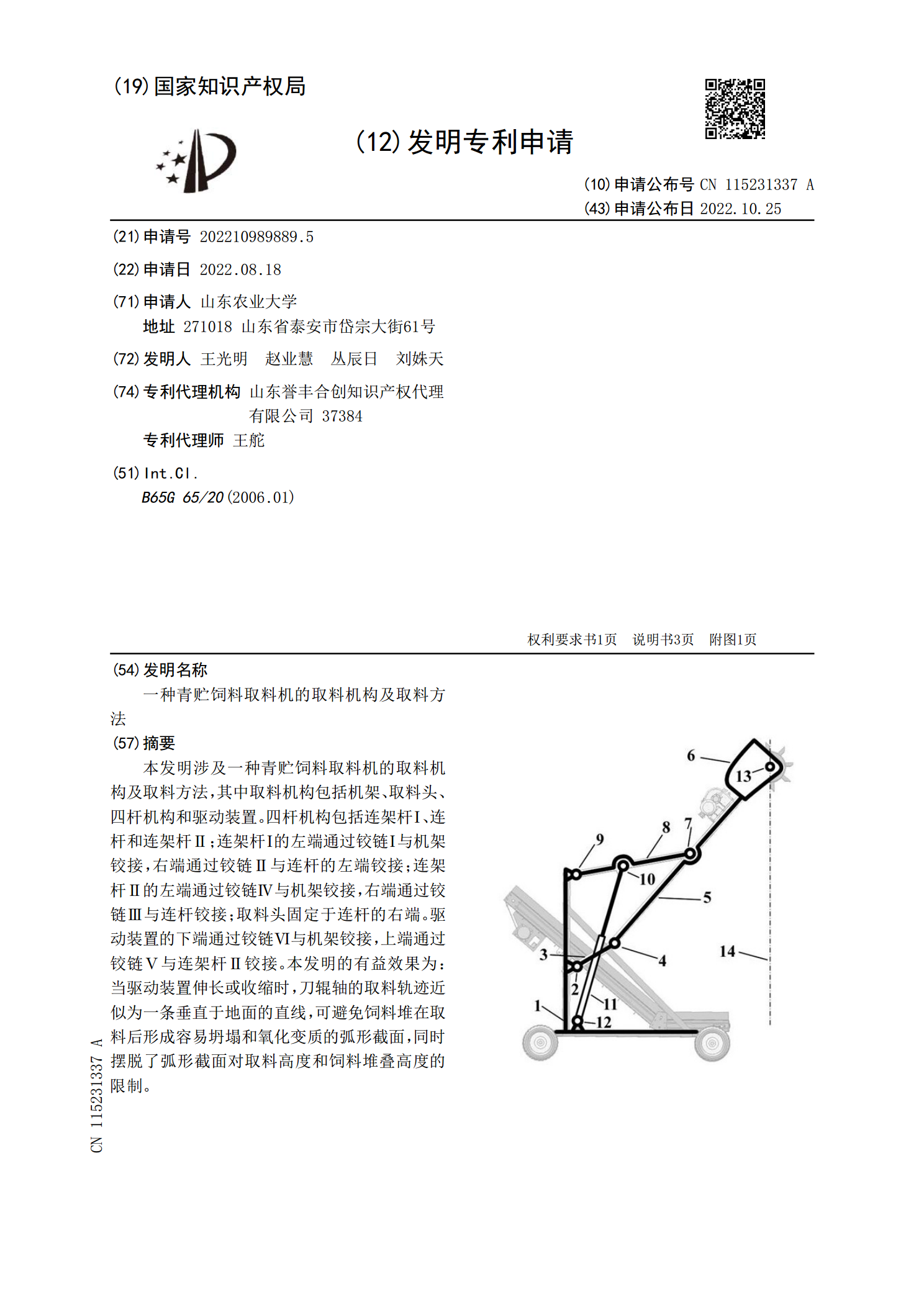
本发明涉及一种青贮饲料取料机的取料机构及取料方法,其中取料机构包括机架、取料头、四杆机构和驱动装置。四杆机构包括连架杆Ⅰ、连杆和连架杆Ⅱ;连架杆Ⅰ的左端通过铰链Ⅰ与机架铰接,右端通过铰链Ⅱ与连杆的左端铰接;连架杆Ⅱ的左端通过铰链Ⅳ与机架铰接,右端通过铰链Ⅲ与连杆铰接;取料头固定于连杆的右端。驱动装置的下端通过铰链Ⅵ与机架铰接,上端通过铰链Ⅴ与连架杆Ⅱ铰接。本发明的有益效果为:当驱动装置伸长或收缩时,刀辊轴的取料轨迹近似为一条垂直于地面的直线,可避免饲料堆在取料后形成容易坍塌和氧化变质的弧形截面,同时摆脱了
取料机构.pdf
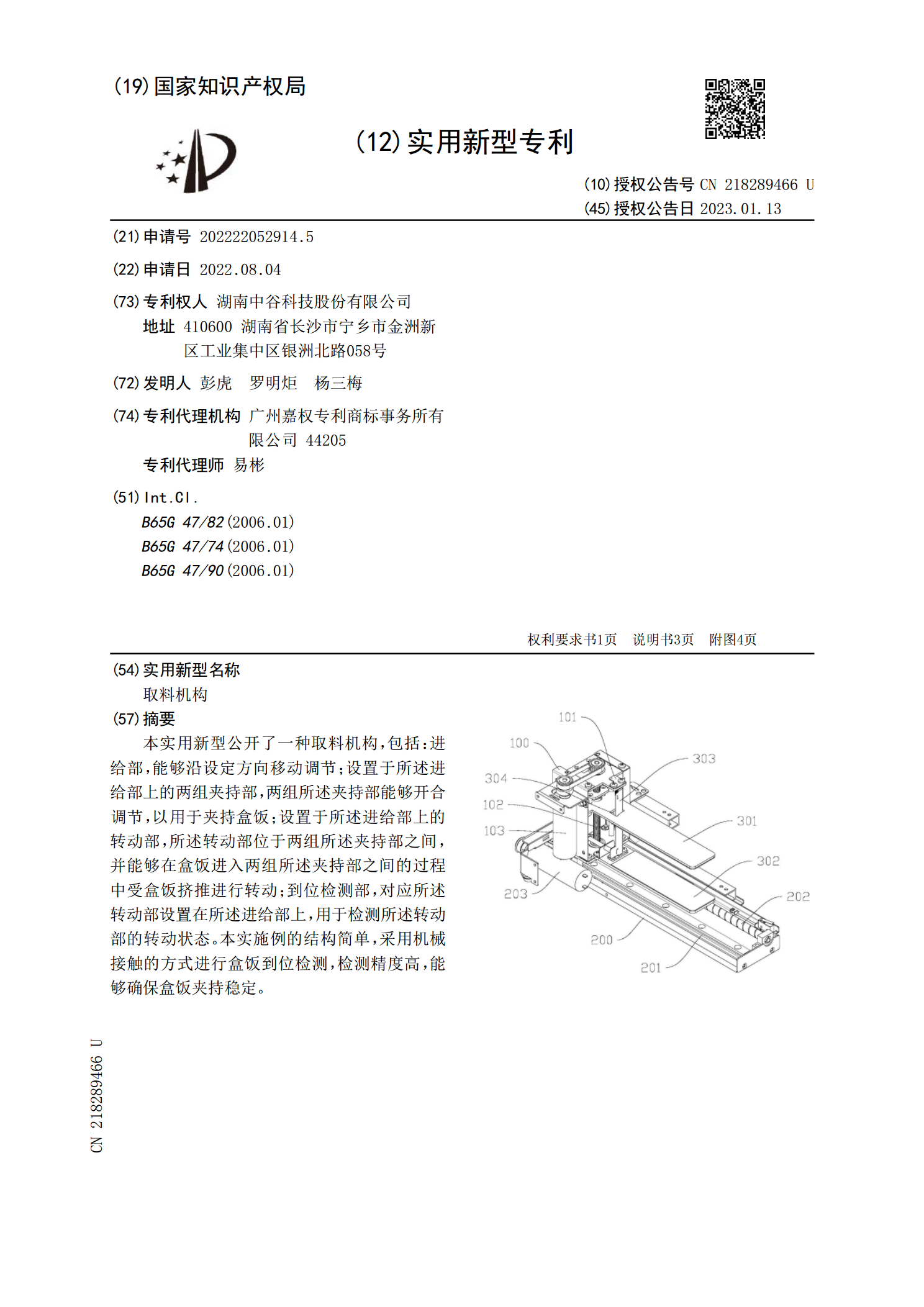
本实用新型公开了一种取料机构,包括:进给部,能够沿设定方向移动调节;设置于所述进给部上的两组夹持部,两组所述夹持部能够开合调节,以用于夹持盒饭;设置于所述进给部上的转动部,所述转动部位于两组所述夹持部之间,并能够在盒饭进入两组所述夹持部之间的过程中受盒饭挤推进行转动;到位检测部,对应所述转动部设置在所述进给部上,用于检测所述转动部的转动状态。本实施例的结构简单,采用机械接触的方式进行盒饭到位检测,检测精度高,能够确保盒饭夹持稳定。
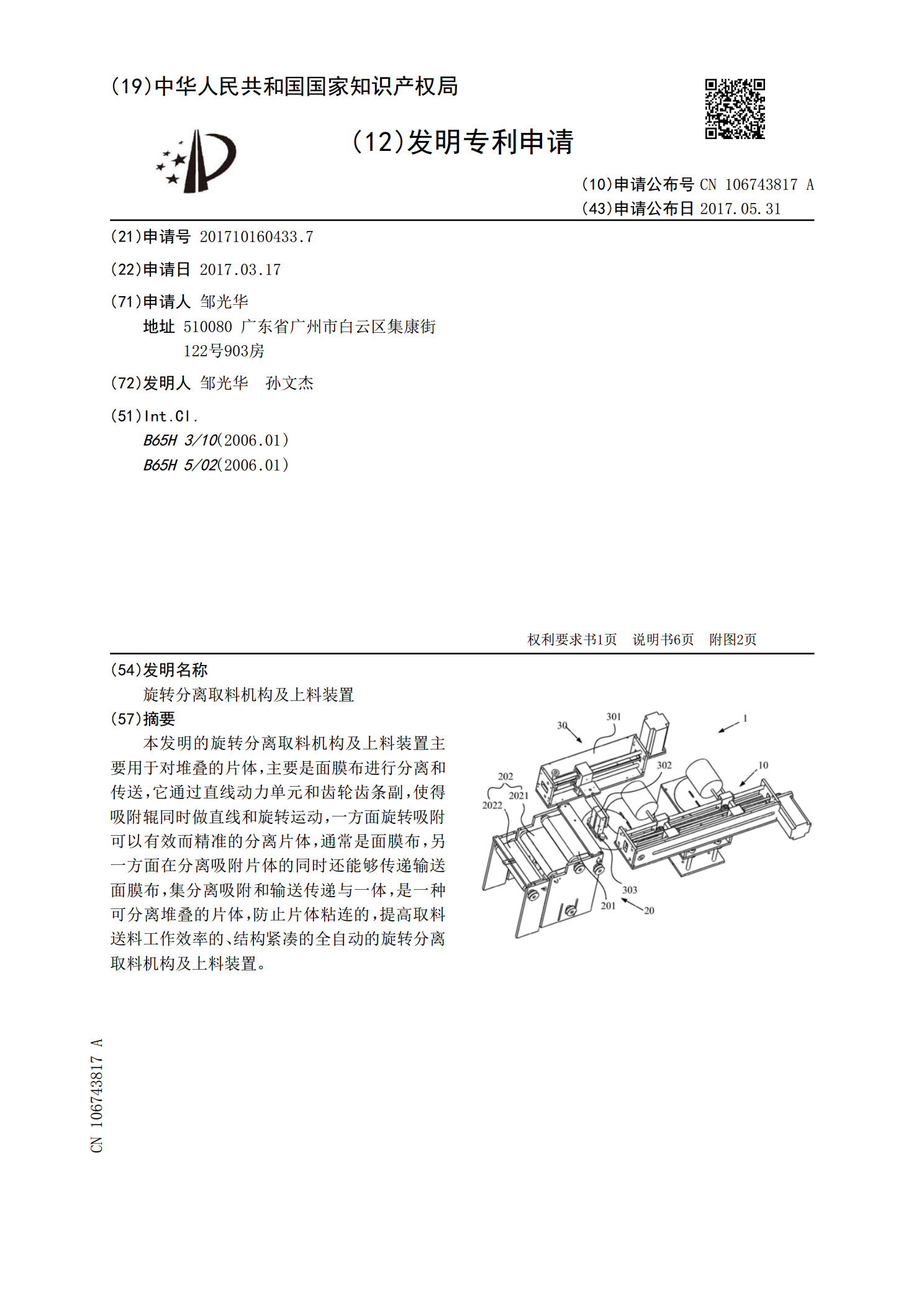
旋转分离取料机构及上料装置.pdf
本发明的旋转分离取料机构及上料装置主要用于对堆叠的片体,主要是面膜布进行分离和传送,它通过直线动力单元和齿轮齿条副,使得吸附辊同时做直线和旋转运动,一方面旋转吸附可以有效而精准的分离片体,通常是面膜布,另一方面在分离吸附片体的同时还能够传递输送面膜布,集分离吸附和输送传递与一体,是一种可分离堆叠的片体,防止片体粘连的,提高取料送料工作效率的、结构紧凑的全自动的旋转分离取料机构及上料装置。