
一种斗轮取料机取料控制方法及斗轮取料机.pdf

一吃****永贺


1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种斗轮取料机取料控制方法及斗轮取料机.pdf
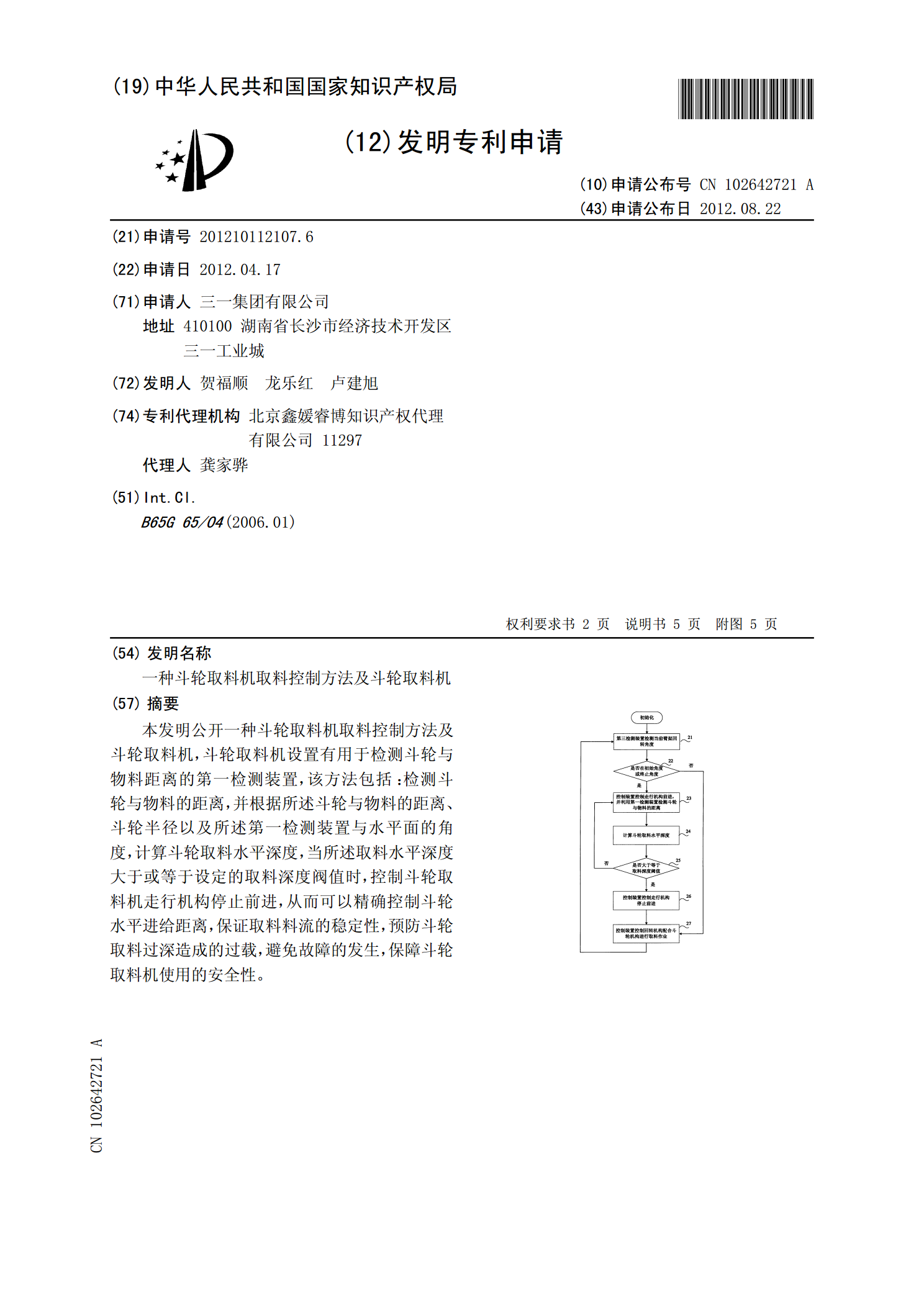
本发明公开一种斗轮取料机取料控制方法及斗轮取料机,斗轮取料机设置有用于检测斗轮与物料距离的第一检测装置,该方法包括:检测斗轮与物料的距离,并根据所述斗轮与物料的距离、斗轮半径以及所述第一检测装置与水平面的角度,计算斗轮取料水平深度,当所述取料水平深度大于或等于设定的取料深度阀值时,控制斗轮取料机走行机构停止前进,从而可以精确控制斗轮水平进给距离,保证取料料流的稳定性,预防斗轮取料过深造成的过载,避免故障的发生,保障斗轮取料机使用的安全性。
一种斗轮堆取料机的分料装置及斗轮堆取料机.pdf
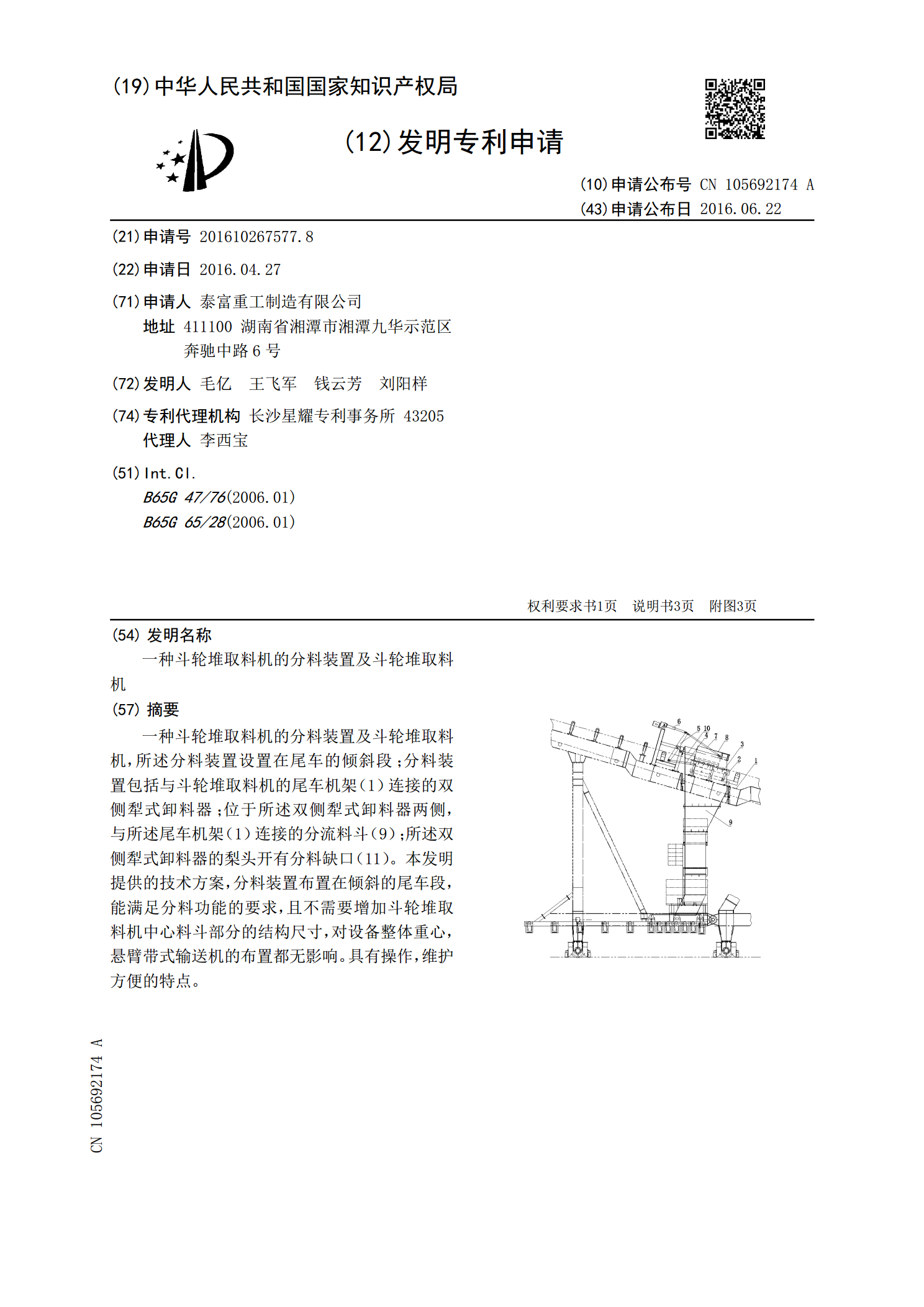
一种斗轮堆取料机的分料装置及斗轮堆取料机,所述分料装置设置在尾车的倾斜段;分料装置包括与斗轮堆取料机的尾车机架(1)连接的双侧犁式卸料器;位于所述双侧犁式卸料器两侧,与所述尾车机架(1)连接的分流料斗(9);所述双侧犁式卸料器的梨头开有分料缺口(11)。本发明提供的技术方案,分料装置布置在倾斜的尾车段,能满足分料功能的要求,且不需要增加斗轮堆取料机中心料斗部分的结构尺寸,对设备整体重心,悬臂带式输送机的布置都无影响。具有操作,维护方便的特点。

一种斗轮取料机取料混配作业的控制方法.pdf
本发明公开了一种斗轮取料机取料混配作业的控制方法,涉及斗轮取料机取料控制领域,包括按比例取料;斗轮取料机参数设置;进行多模式控制;互通共享多台斗轮取料机的信息;计算物料汇合点距离差和时间差;控制步进精度;获取取料瞬时流量波形图对比数值,并记录混配质量;计算单位时间内混配取料累积量,调整多台所述斗轮取料机各自的参数,本发明从多台斗轮取料机之间数据信息互通共享以及斗轮机回转速度多模式控制,得到单位时间内的累计量趋势图对比、瞬时量波形图对比、行走位置信息界面显示等多方面信息,降低取料司机操作强度、记录取料混配过

全功能斗轮堆取料机及其取料方法.pdf
本发明公开了一种全功能斗轮堆取料机及其取料方法,其特征在于:包括主机、活动式尾车装置Ⅰ、活动式尾车装置Ⅱ、分叉漏斗装置、悬臂导料槽装置、斜漏斗装置、中心下部漏斗装置;本发明通过活动式尾车装置Ⅰ、活动式尾车装置Ⅱ两种位置组合,配合分叉漏斗装置内部活动板的位置变化,实现单机具备一条地面皮带输送带双向来料堆向料场功能、双向来料直通功能、取料双向输送功能及双向来料分流的功能。本发明具有实现单机功能俱全、降低设备投资及土建成本,提高料场利用率及降低运行成本,结构简单,使用维护方便等优点,极大地提高了生产效率。

斗轮堆取料机.docx
第三章斗轮堆取料机一、概述煤场机械的种类很多,常用的有:斗轮堆取料机、门式滚轮机及装卸桥。煤场机械形式的选择,取决于煤场的形状。斗轮堆取料机常用于条形煤场中。斗轮堆取料机是在斗轮挖掘机的基础上发展起来的,是一种大型、连续、高效的散料装卸机械。它具有生产效率高、能耗低、自重轻、投资省及操作简便等优点。斗轮机的形式很多,其分类方法也较多。按行走机构的形式,斗轮堆取料机可分为履带式、轮胎式及轨道式三种;按斗轮臂架的平衡方式,斗轮堆取料机可分为活配重式、死配重式及整体平衡式三种;按理论生产能力,斗轮堆取料机可分为