
轨道式巡检机器人.pdf

是秋****写意


1/8

2/8
3/8
4/8

5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轨道式巡检机器人.pdf
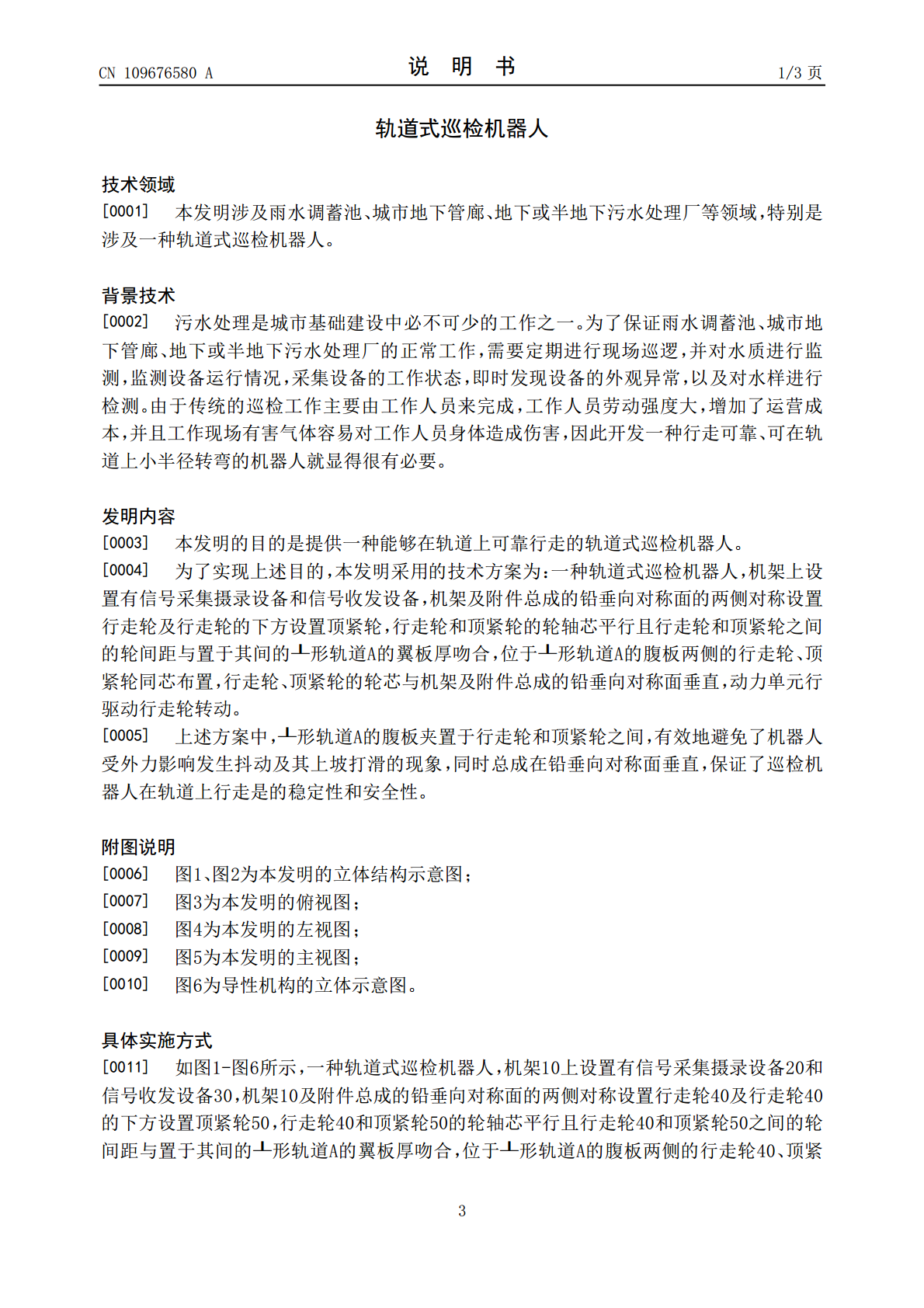
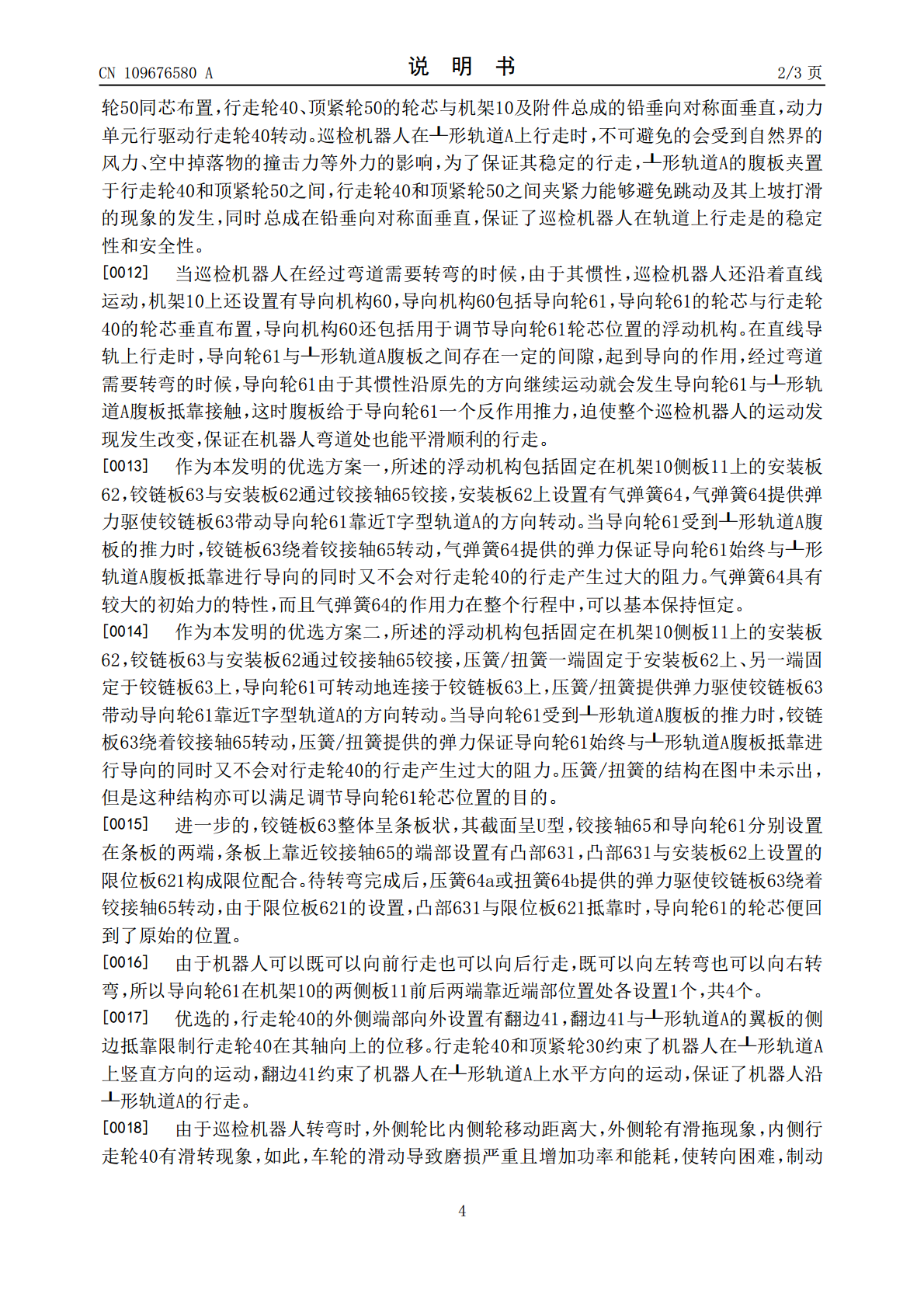
本发明的目的是提供一种能够在轨道上可靠行走的轨道式巡检机器人,机架上设置有信号采集摄录设备和信号收发设备,机架及附件总成的铅垂向对称面的两侧对称设置行走轮及行走轮的下方设置顶紧轮,行走轮和顶紧轮的轮轴芯平行且行走轮和顶紧轮之间的轮间距与置于其间的┸形轨道A的翼板厚吻合,位于┸形轨道A的腹板两侧的行走轮、顶紧轮同芯布置,行走轮、顶紧轮的轮芯与机架及附件总成的铅垂向对称面垂直,动力单元行驱动行走轮转动。上述方案中,┸形轨道A的腹板夹置于行走轮和顶紧轮之间,有效地避免了机器人受外力影响发生抖动及其上坡打滑的现象
轨道式智能巡检机器人.pdf
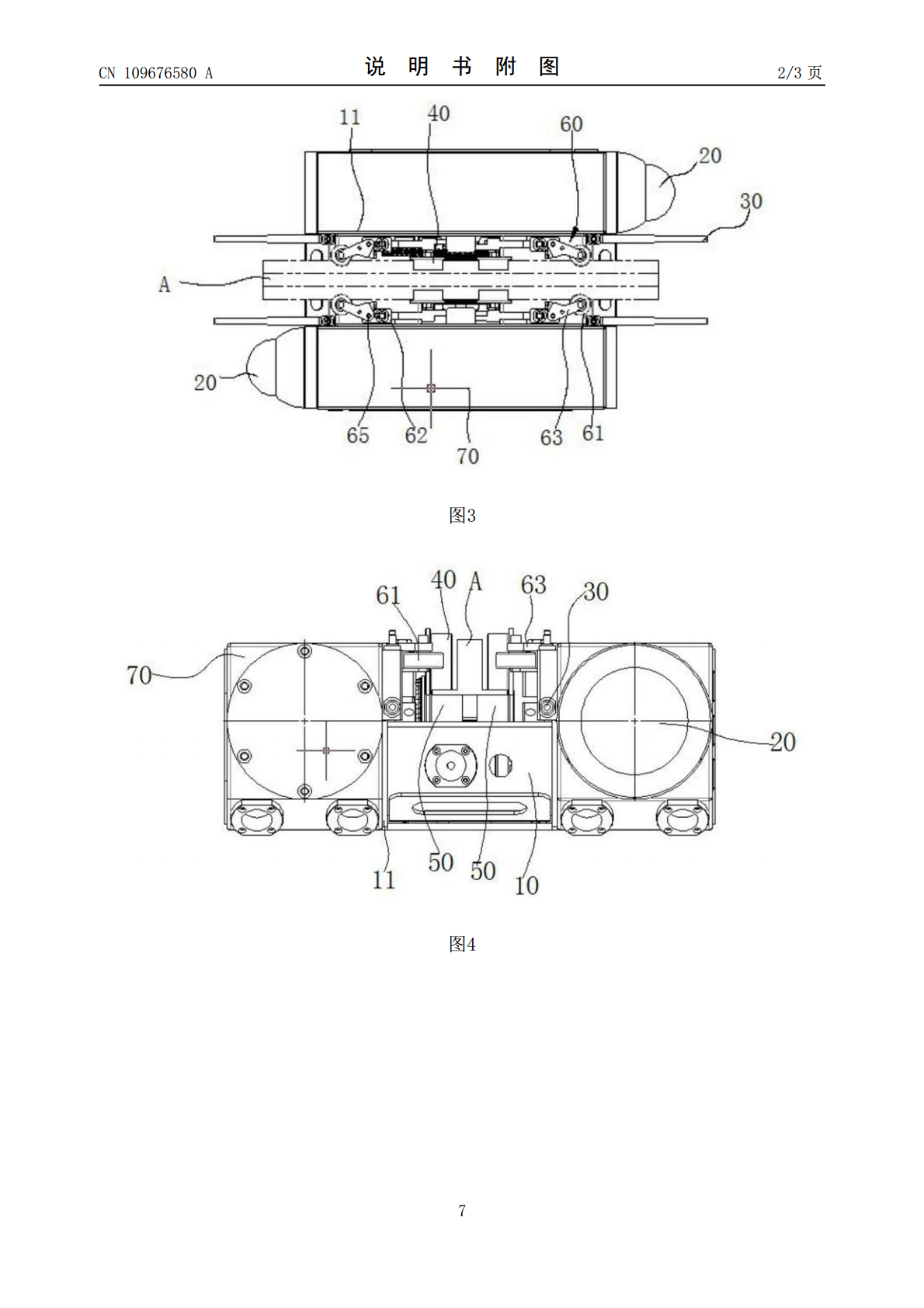
本发明公开了轨道式智能巡检机器人,该机器人安装于导轨上,该机器人包括主体、蓄电池、移动机构、控制装置、升降机构、巡检机构和电池控制器;所述的升降机构包括剪叉式升降平台、安装于主体内的绕线电机、绕线轮和绳索,所述的巡检机构包括电动云台、摄像头、辅助照明射灯和探测器总成,所述电动云台和探测器总成固定安装于所述的剪叉式升降平台底部,所述摄像头和辅助照明射灯安装于所述电动云台上。本发明采用两组驱动轮组安装在主体左右两侧,用于与导轨两侧的轨道配合,实现左右转弯更灵活,满足导轨在空间有限的场所进行布置;此外,还设置有
轨道式巡检机器人定位方法.pdf
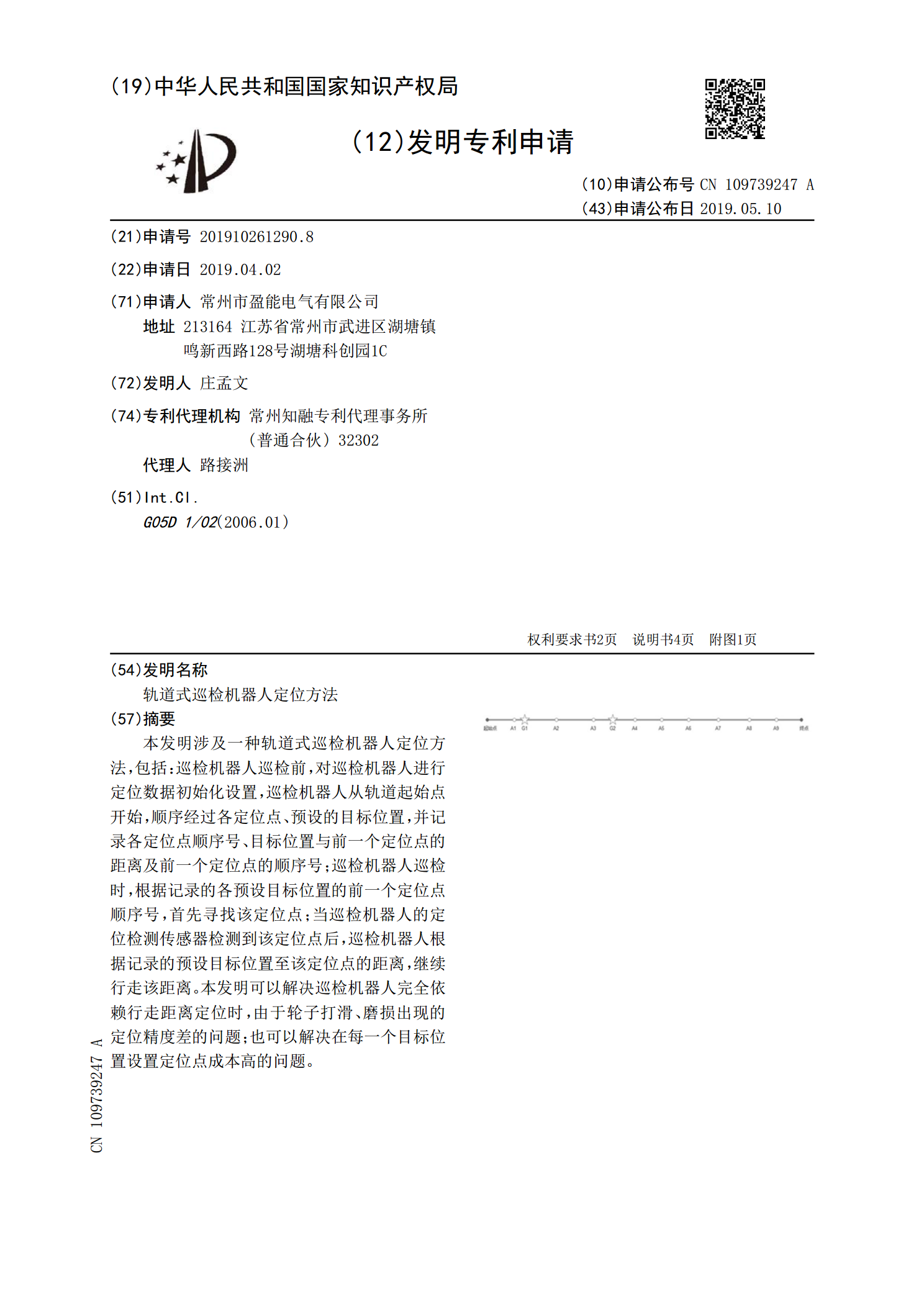
本发明涉及一种轨道式巡检机器人定位方法,包括:巡检机器人巡检前,对巡检机器人进行定位数据初始化设置,巡检机器人从轨道起始点开始,顺序经过各定位点、预设的目标位置,并记录各定位点顺序号、目标位置与前一个定位点的距离及前一个定位点的顺序号;巡检机器人巡检时,根据记录的各预设目标位置的前一个定位点顺序号,首先寻找该定位点;当巡检机器人的定位检测传感器检测到该定位点后,巡检机器人根据记录的预设目标位置至该定位点的距离,继续行走该距离。本发明可以解决巡检机器人完全依赖行走距离定位时,由于轮子打滑、磨损出现的定位精度

一种轨道式巡检机器人.pdf
本发明公开了巡检技术领域的一种轨道式巡检机器人,包括轨道、巡检装置和充电装置,所述巡检装置包括移动框架,所述移动框架的内腔中上部安装有两组与轨道顶部抵接的驱动轮,所述移动框架的左侧上方安装固接有铁板,所述移动框架的底部中央安装有升降装置,所述升降装置的底部固接有下安装块,所述下安装块的内腔中部固定安装有蓄电池,本发明适用于对工矿企业、仓库、车间生产线、无人值守的机房,或者是日常生活中的大型教室、走廊进行巡检监控,通过升降装置、电动转台和电动推杆一,可实现红外热成像摄像头多角度多方位的拍摄,确保巡检的安全性

一种轨道式巡检机器人.pdf
本发明公开了一种轨道式巡检机器人,包括箱体,所述箱体的上方设有工型安装条,工型安装条的内部上下表面均设有导条,工型安装条前后两侧的中部均设有第二辊轮,第二辊轮的外侧面与导条接触,第二辊轮的前后表面分别设有定位轴,箱体的上表面设有第三电机,第三电机的输出轴端部和定位轴的端部均设有皮带轮,箱体的上表面设有两个前后对应的固定杆,且定位轴的一端穿过皮带轮通过轴承座与固定杆连接,通过第一电机能够带动第四齿轮的转动,第四齿轮能够带动第三齿轮的转动,第三齿轮能够使第二转轴进行转动,第二转轴可以使摄像头的角度进行调整,不