
一种轨道式巡检机器人.pdf

哲妍****彩妍


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种轨道式巡检机器人.pdf
本发明公开了巡检技术领域的一种轨道式巡检机器人,包括轨道、巡检装置和充电装置,所述巡检装置包括移动框架,所述移动框架的内腔中上部安装有两组与轨道顶部抵接的驱动轮,所述移动框架的左侧上方安装固接有铁板,所述移动框架的底部中央安装有升降装置,所述升降装置的底部固接有下安装块,所述下安装块的内腔中部固定安装有蓄电池,本发明适用于对工矿企业、仓库、车间生产线、无人值守的机房,或者是日常生活中的大型教室、走廊进行巡检监控,通过升降装置、电动转台和电动推杆一,可实现红外热成像摄像头多角度多方位的拍摄,确保巡检的安全性

一种轨道式巡检机器人.pdf
本发明公开了一种轨道式巡检机器人,包括箱体,所述箱体的上方设有工型安装条,工型安装条的内部上下表面均设有导条,工型安装条前后两侧的中部均设有第二辊轮,第二辊轮的外侧面与导条接触,第二辊轮的前后表面分别设有定位轴,箱体的上表面设有第三电机,第三电机的输出轴端部和定位轴的端部均设有皮带轮,箱体的上表面设有两个前后对应的固定杆,且定位轴的一端穿过皮带轮通过轴承座与固定杆连接,通过第一电机能够带动第四齿轮的转动,第四齿轮能够带动第三齿轮的转动,第三齿轮能够使第二转轴进行转动,第二转轴可以使摄像头的角度进行调整,不

一种轨道式巡检机器人.pdf
本发明适用于巡检机器人技术领,提供了一种轨道式巡检机器人,包括机器人本体、主控单元、能源模块、检测组件以及无线通讯模块。机器人本体包括至少两节车体单元,每一车体单元包括运动驱动模块以及滑轮组;运动驱动模块驱动滑轮组于轨道上滚动;相邻的两节车体单元通过一柔顺关节连接,可在水平和/或竖直方向相对地旋转,机器人能在转弯和/或爬坡的轨道上运行。机器人能实时检测轨道附近的设备及环境,并将信息传输到远程操控中心,工作人员能实时地了解检测到的信息,并可向机器人发送控制指令。本发明的机器人检测结果稳定,无需人员到现场检测

轨道式巡检机器人.pdf
本发明的目的是提供一种能够在轨道上可靠行走的轨道式巡检机器人,机架上设置有信号采集摄录设备和信号收发设备,机架及附件总成的铅垂向对称面的两侧对称设置行走轮及行走轮的下方设置顶紧轮,行走轮和顶紧轮的轮轴芯平行且行走轮和顶紧轮之间的轮间距与置于其间的┸形轨道A的翼板厚吻合,位于┸形轨道A的腹板两侧的行走轮、顶紧轮同芯布置,行走轮、顶紧轮的轮芯与机架及附件总成的铅垂向对称面垂直,动力单元行驱动行走轮转动。上述方案中,┸形轨道A的腹板夹置于行走轮和顶紧轮之间,有效地避免了机器人受外力影响发生抖动及其上坡打滑的现象
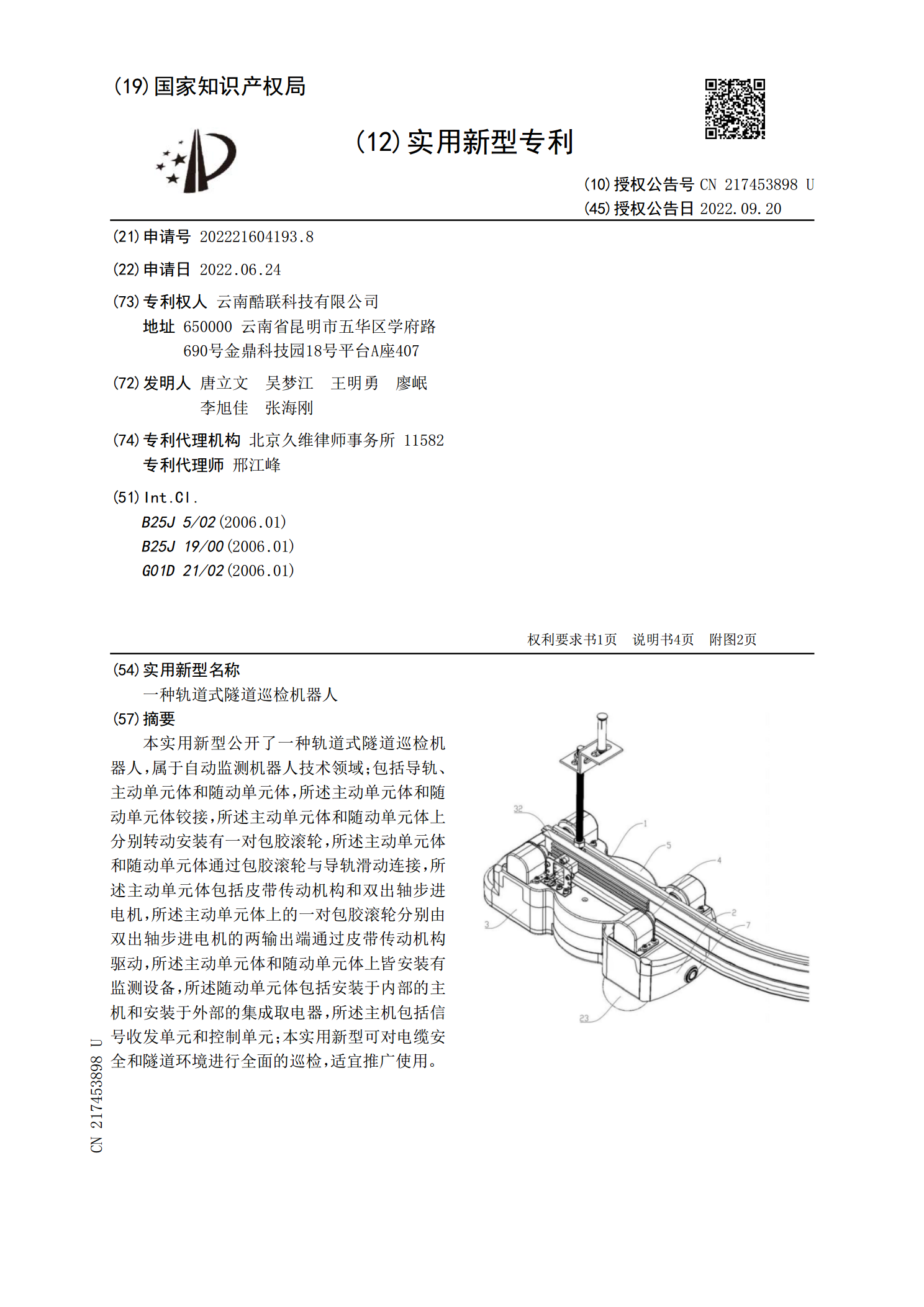
一种轨道式隧道巡检机器人.pdf
本实用新型公开了一种轨道式隧道巡检机器人,属于自动监测机器人技术领域;包括导轨、主动单元体和随动单元体,所述主动单元体和随动单元体铰接,所述主动单元体和随动单元体上分别转动安装有一对包胶滚轮,所述主动单元体和随动单元体通过包胶滚轮与导轨滑动连接,所述主动单元体包括皮带传动机构和双出轴步进电机,所述主动单元体上的一对包胶滚轮分别由双出轴步进电机的两输出端通过皮带传动机构驱动,所述主动单元体和随动单元体上皆安装有监测设备,所述随动单元体包括安装于内部的主机和安装于外部的集成取电器,所述主机包括信号收发单元和控