
一种玻璃外墙清洁机器人.pdf

一条****然后

1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种玻璃外墙清洁机器人.pdf
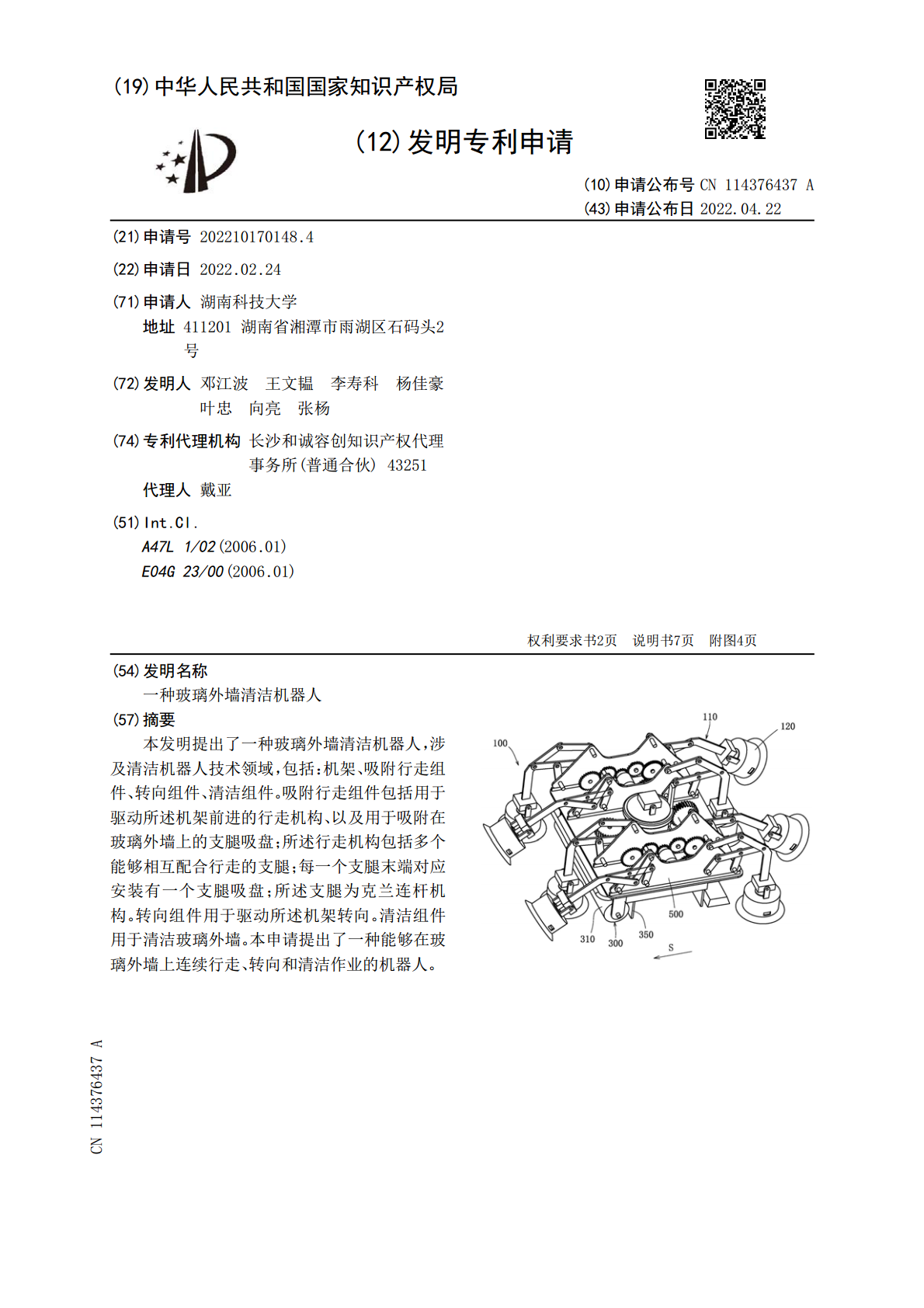
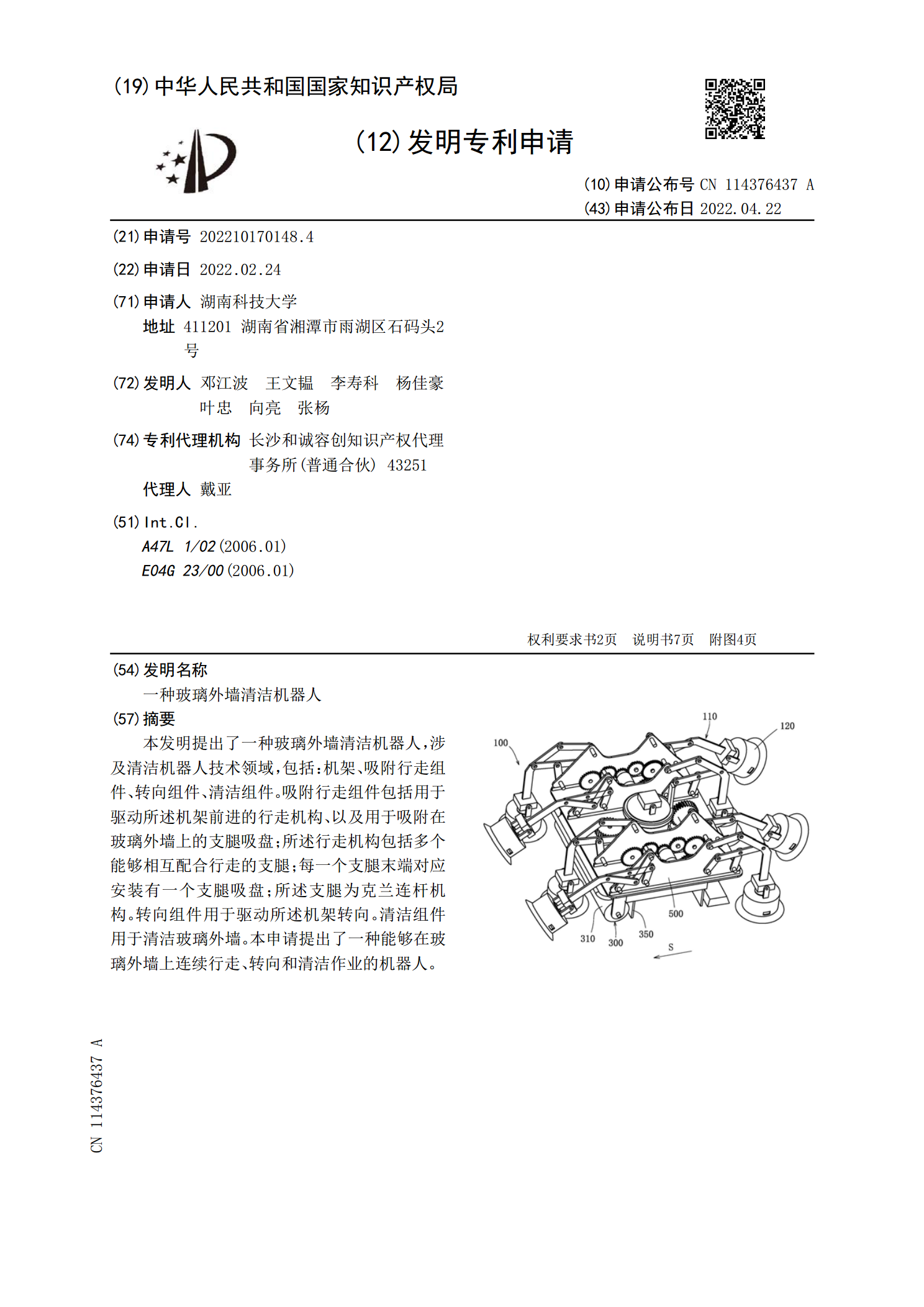
本发明提出了一种玻璃外墙清洁机器人,涉及清洁机器人技术领域,包括:机架、吸附行走组件、转向组件、清洁组件。吸附行走组件包括用于驱动所述机架前进的行走机构、以及用于吸附在玻璃外墙上的支腿吸盘;所述行走机构包括多个能够相互配合行走的支腿;每一个支腿末端对应安装有一个支腿吸盘;所述支腿为克兰连杆机构。转向组件用于驱动所述机架转向。清洁组件用于清洁玻璃外墙。本申请提出了一种能够在玻璃外墙上连续行走、转向和清洁作业的机器人。
一种建筑物外墙玻璃面清洁机器人.pdf
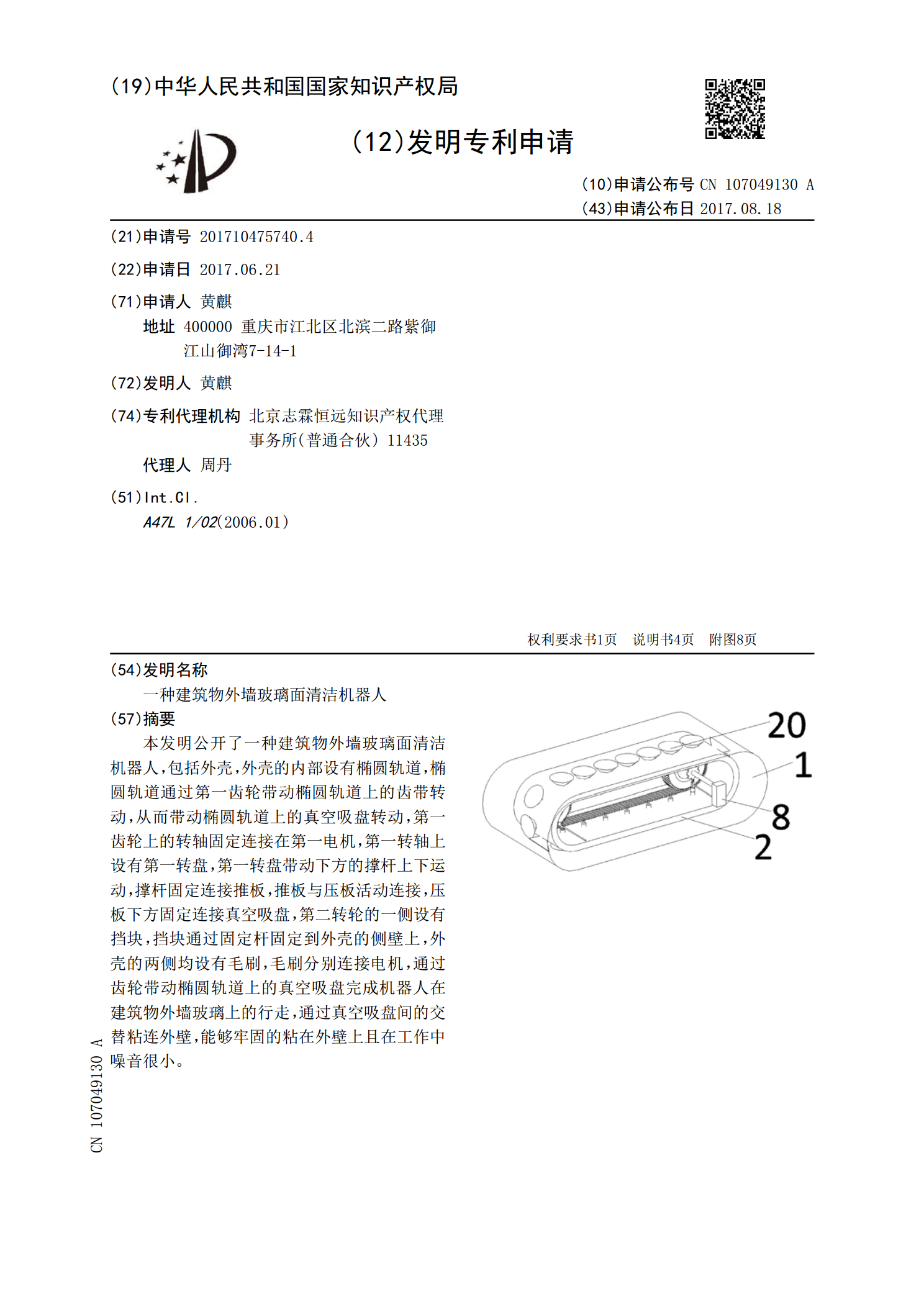
本发明公开了一种建筑物外墙玻璃面清洁机器人,包括外壳,外壳的内部设有椭圆轨道,椭圆轨道通过第一齿轮带动椭圆轨道上的齿带转动,从而带动椭圆轨道上的真空吸盘转动,第一齿轮上的转轴固定连接在第一电机,第一转轴上设有第一转盘,第一转盘带动下方的撑杆上下运动,撑杆固定连接推板,推板与压板活动连接,压板下方固定连接真空吸盘,第二转轮的一侧设有挡块,挡块通过固定杆固定到外壳的侧壁上,外壳的两侧均设有毛刷,毛刷分别连接电机,通过齿轮带动椭圆轨道上的真空吸盘完成机器人在建筑物外墙玻璃上的行走,通过真空吸盘间的交替粘连外壁,
高空玻璃外墙清洁机器人.pdf
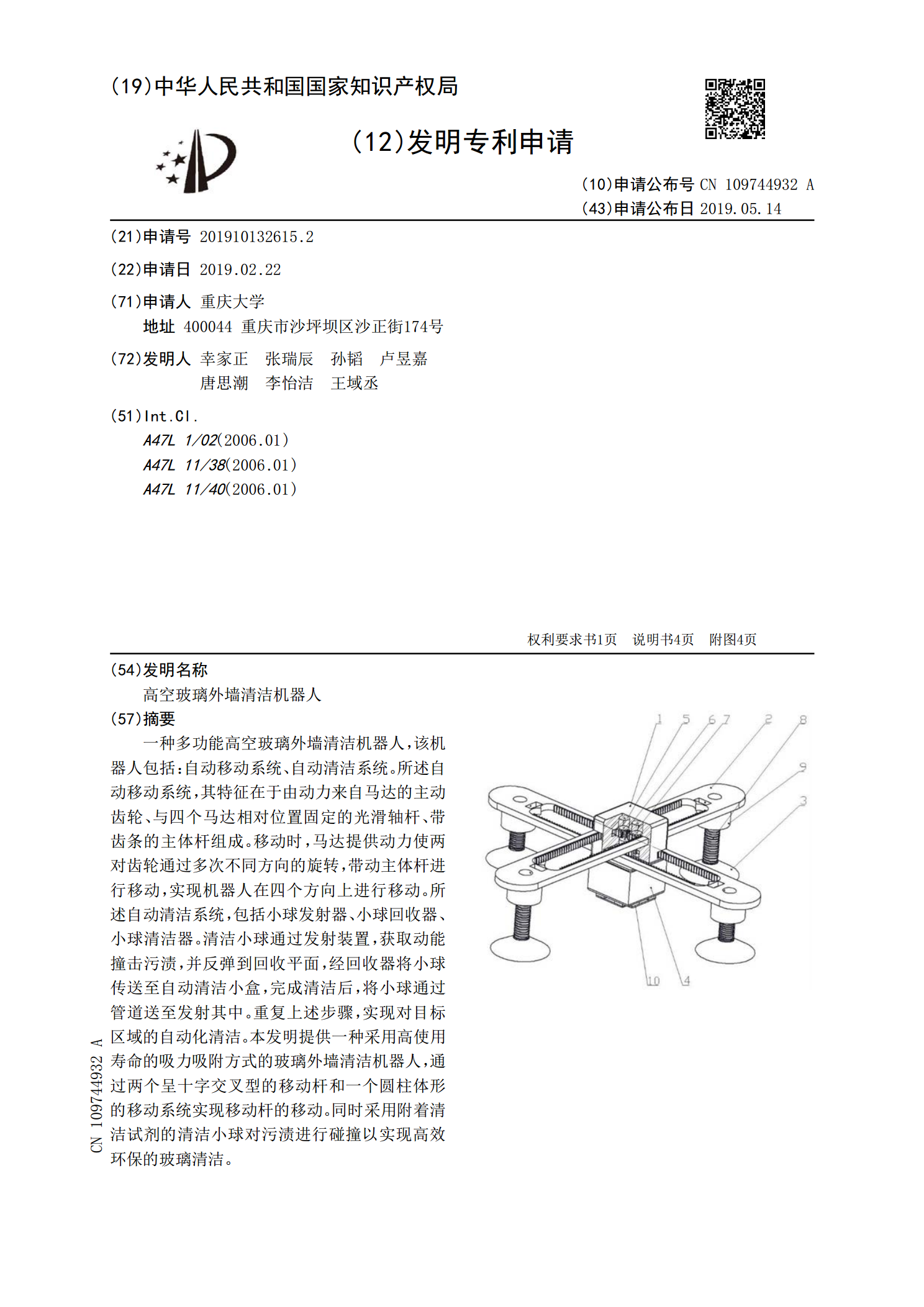
一种多功能高空玻璃外墙清洁机器人,该机器人包括:自动移动系统、自动清洁系统。所述自动移动系统,其特征在于由动力来自马达的主动齿轮、与四个马达相对位置固定的光滑轴杆、带齿条的主体杆组成。移动时,马达提供动力使两对齿轮通过多次不同方向的旋转,带动主体杆进行移动,实现机器人在四个方向上进行移动。所述自动清洁系统,包括小球发射器、小球回收器、小球清洁器。清洁小球通过发射装置,获取动能撞击污渍,并反弹到回收平面,经回收器将小球传送至自动清洁小盒,完成清洁后,将小球通过管道送至发射其中。重复上述步骤,实现对目标区域的

一种清洁玻璃用机器人.pdf
本发明公开了一种清洁玻璃用机器人,包括机体,所述机体的内腔焊接有装置箱,所述装置箱内腔背面的左侧通过固定件固定连接有第一电机,所述第一电机的输出轴固定连接有主动齿轮,所述主动齿轮的表面通过链条传动连接有从动齿轮,所述从动齿轮的背面焊接有转杆。本发明通过设置第一电机、主动齿轮、链条、从动齿轮、转杆、固定轴、环形槽板和滑槽的配合,达到了毛刷左右往复移动的效果,通过设置电动升缩杆、第二电机、毛刷、水箱、出水管、水泵、软水管和喷头的配合,达到了对玻璃进行清洁的效果,从而实现了对玻璃清洁效率高的优点,给清洗玻璃的工

一种玻璃门窗清洁机器人.pdf
一种玻璃门窗清洁机器人,解决现有技术存在的工作效率低、可靠性差、真空气泵功率大、内置电池工作时间短等缺点,技术方案是:一种玻璃门窗清洁机器人,包括:自动控制部分、动力电机、真空风机、真空吸盘、旋转清洁盘和机架。动力电机固定在机架上,动力电机经动力齿轮分别与两个旋转清洁盘上的齿轮啮合。旋转清洁盘经轴承套装在所述的真空吸盘上,旋转清洁盘的端面上浮动连接有环形清洁擦。真空吸盘一端设置有真空腔,真空吸盘经端面轴承与机架构成可相对转到的活动连接,真空吸盘中心设在有通孔。真空风机固定在机架上,真空风机进风口经电磁换向