
用于确定车辆三维框架的方法和装置.pdf

是立****92


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于确定车辆三维框架的方法和装置.pdf
本申请实施例公开了用于确定车辆三维框架的方法和装置。上述方法的一具体实施方式包括:获取车辆的图像,上述图像包括第一图像和第二图像,第一图像指示车辆的侧面,第二图像指示车辆的正面或背面,第一图像包括至少两个车轮的图像,侧面为第一面,正面或背面为第二面;在上述图像中,确定至少两个车轮与地面的至少两个接触点;利用最小外接矩形标注第一面以及第二面,得到第一矩形框和第二矩形框;根据第一矩形框、第二矩形框以及至少两个接触点,确定图像中、用于表示车辆的三维框架的长边、宽边和高边;基于长边、宽边和高边,确定车辆的三维框架

用于在车辆上确定间距的方法和装置.pdf
按本发明的方法,用于确定用于对具有车身(3)和至少一个车轮(2)的车辆(1)进行底盘测量的间距,尤其用于确定高度水平(h),该方法包括通过将结构化的光图案至少投影到所述车辆的车轮(2)上这种方式来确定所述车轮(2)的车轮旋转中心(Z)、用经过校准的成像的传感系统来拍摄由所述车轮(2)反射的光图案、从所反射的光图案中确定3D云点并且从所述3D云点中确定所述车轮旋转中心(Z)这些步骤。所述方法也包括通过对以前确定的3D云点的分析或者通过对多个在进行非结构化的照明时拍摄的灰度值图像的分析来确定车身(3)上的点(
用于车辆调节系统的控制装置和用于确定车辆轮胎的轮胎状态的方法.pdf
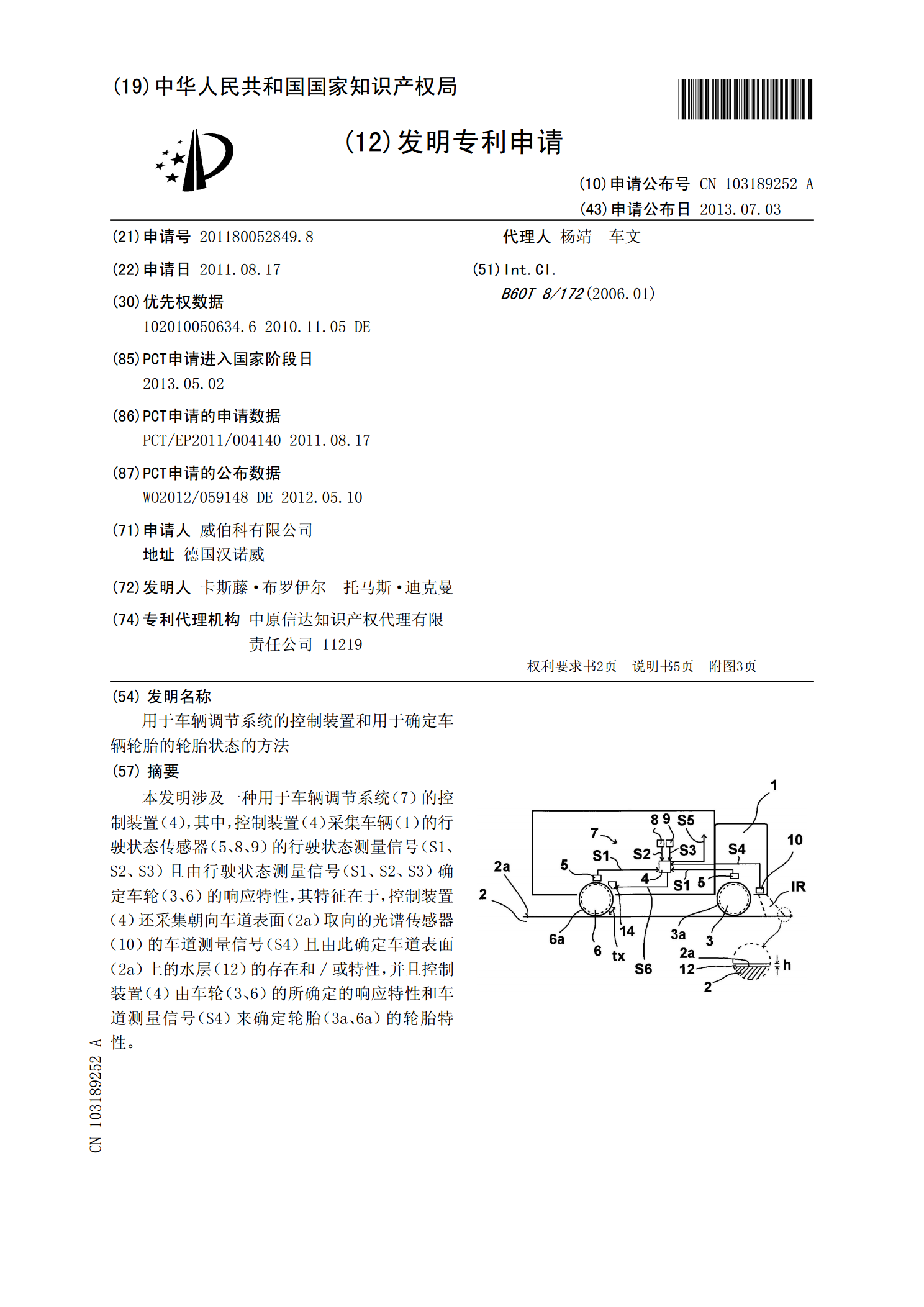
本发明涉及一种用于车辆调节系统(7)的控制装置(4),其中,控制装置(4)采集车辆(1)的行驶状态传感器(5、8、9)的行驶状态测量信号(S1、S2、S3)且由行驶状态测量信号(S1、S2、S3)确定车轮(3、6)的响应特性,其特征在于,控制装置(4)还采集朝向车道表面(2a)取向的光谱传感器(10)的车道测量信号(S4)且由此确定车道表面(2a)上的水层(12)的存在和/或特性,并且控制装置(4)由车轮(3、6)的所确定的响应特性和车道测量信号(S4)来确定轮胎(3a、6a)的轮胎特性。

用于确定车辆的车轴几何学的方法和装置.pdf
一种用于确定车辆(2)的车轴几何学的特征参量的方法,所述方法具有如下步骤:将固定在车辆(2)的车轴(8a)上的车轮(4a)转向到具有不同的车轮转向角(βi)的不同的车辆转向位置上;在不同的车轮转向位置上确定车轮(4a)的空间位置;在不同的转向位置上由空间位置的确定的结果确定车轮(4a)的旋转轴线(ni);建立主销轴线(S)的参数模型(f(βi,ns,os,nD));将主销轴线(S)的参数模型(f(βi,ns,os,nD))与车轮(4a)的、由测量空间位置所确定的旋转轴线(ni)匹配;并且由主销轴线(S)的
确定用于被动进入和车辆启动的装置位置的系统和方法.pdf
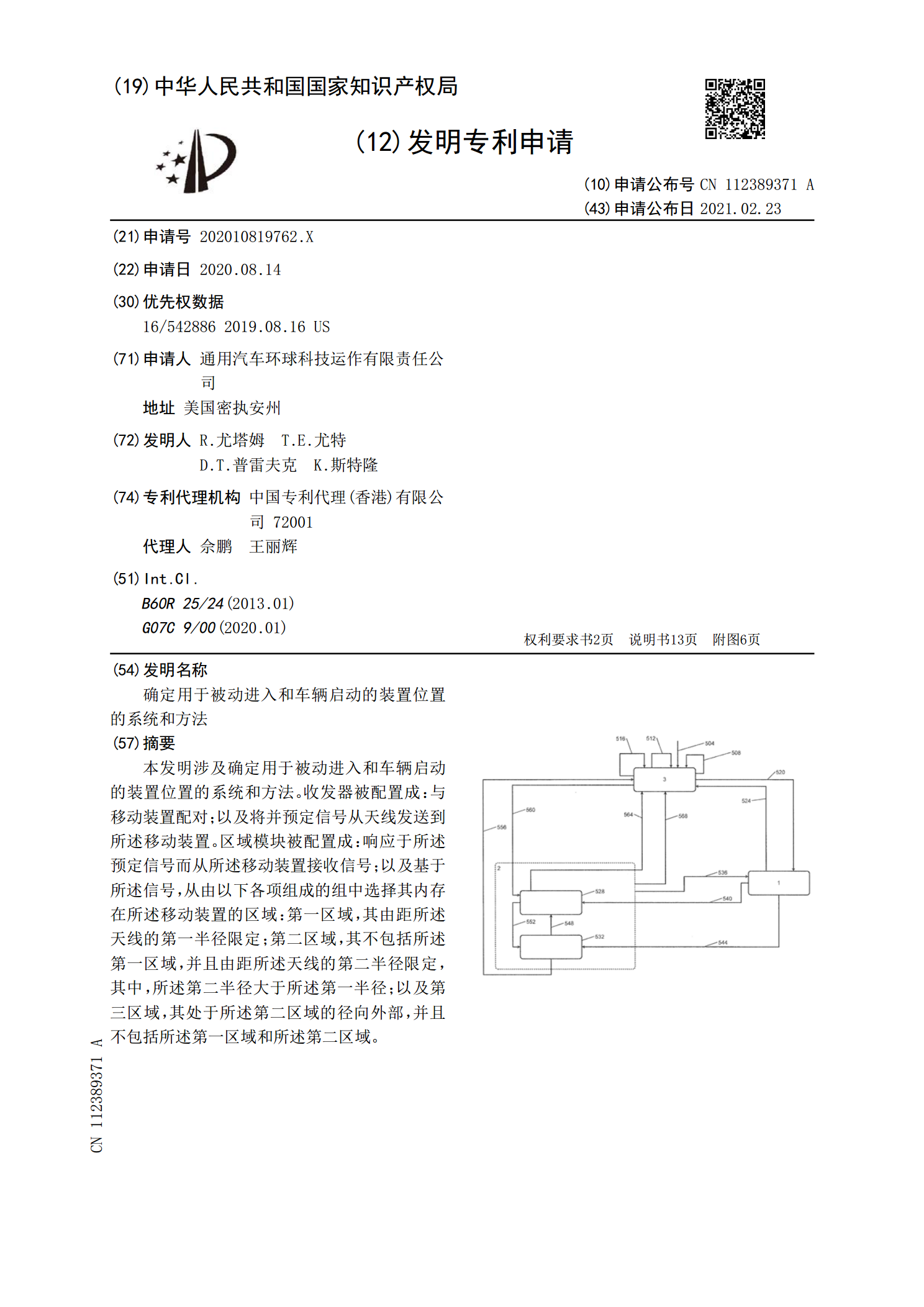
本发明涉及确定用于被动进入和车辆启动的装置位置的系统和方法。收发器被配置成:与移动装置配对;以及将并预定信号从天线发送到所述移动装置。区域模块被配置成:响应于所述预定信号而从所述移动装置接收信号;以及基于所述信号,从由以下各项组成的组中选择其内存在所述移动装置的区域:第一区域,其由距所述天线的第一半径限定;第二区域,其不包括所述第一区域,并且由距所述天线的第二半径限定,其中,所述第二半径大于所述第一半径;以及第三区域,其处于所述第二区域的径向外部,并且不包括所述第一区域和所述第二区域。