
用于在车辆上确定间距的方法和装置.pdf

一只****呀9


1/10
2/10
3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于在车辆上确定间距的方法和装置.pdf
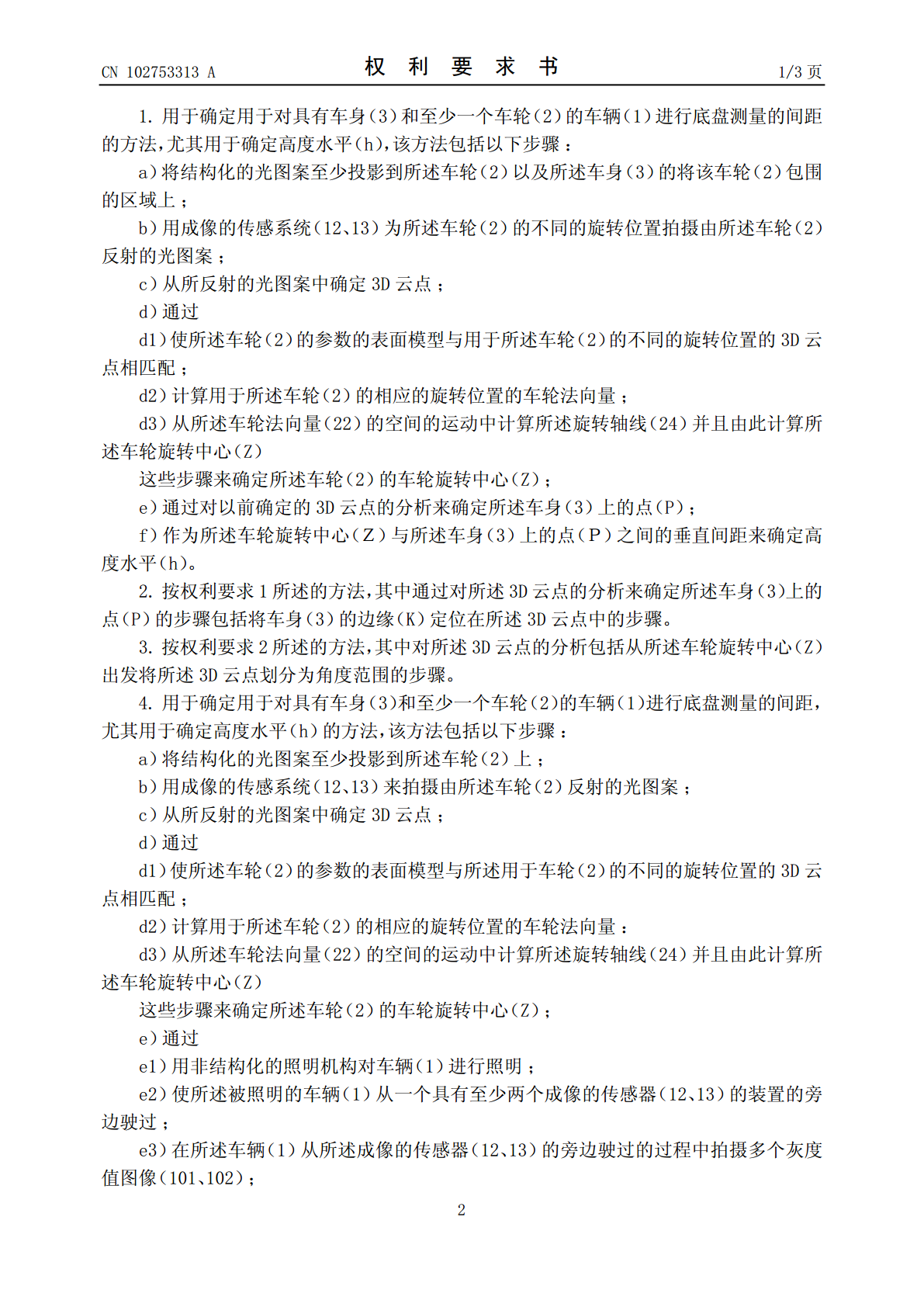
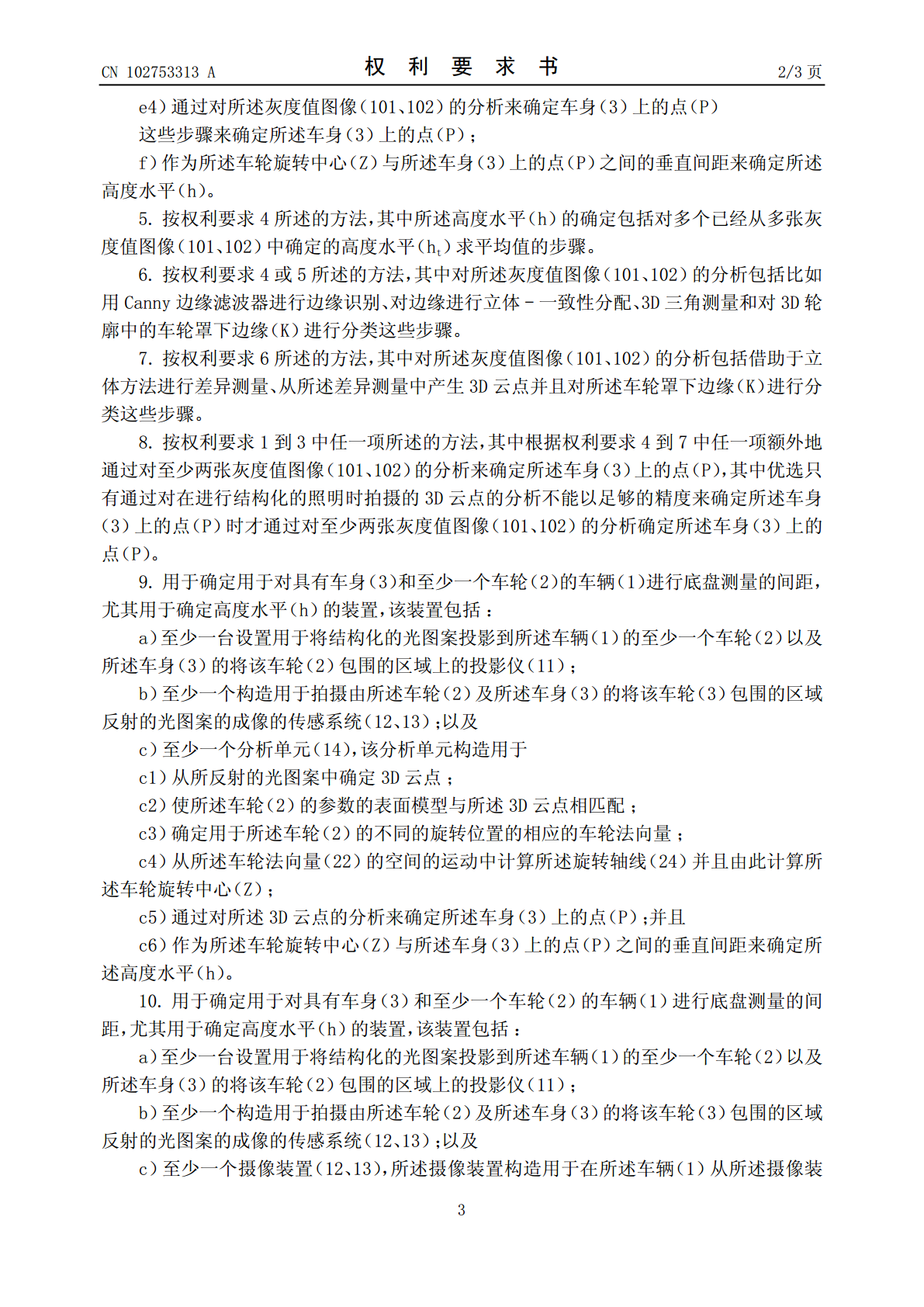
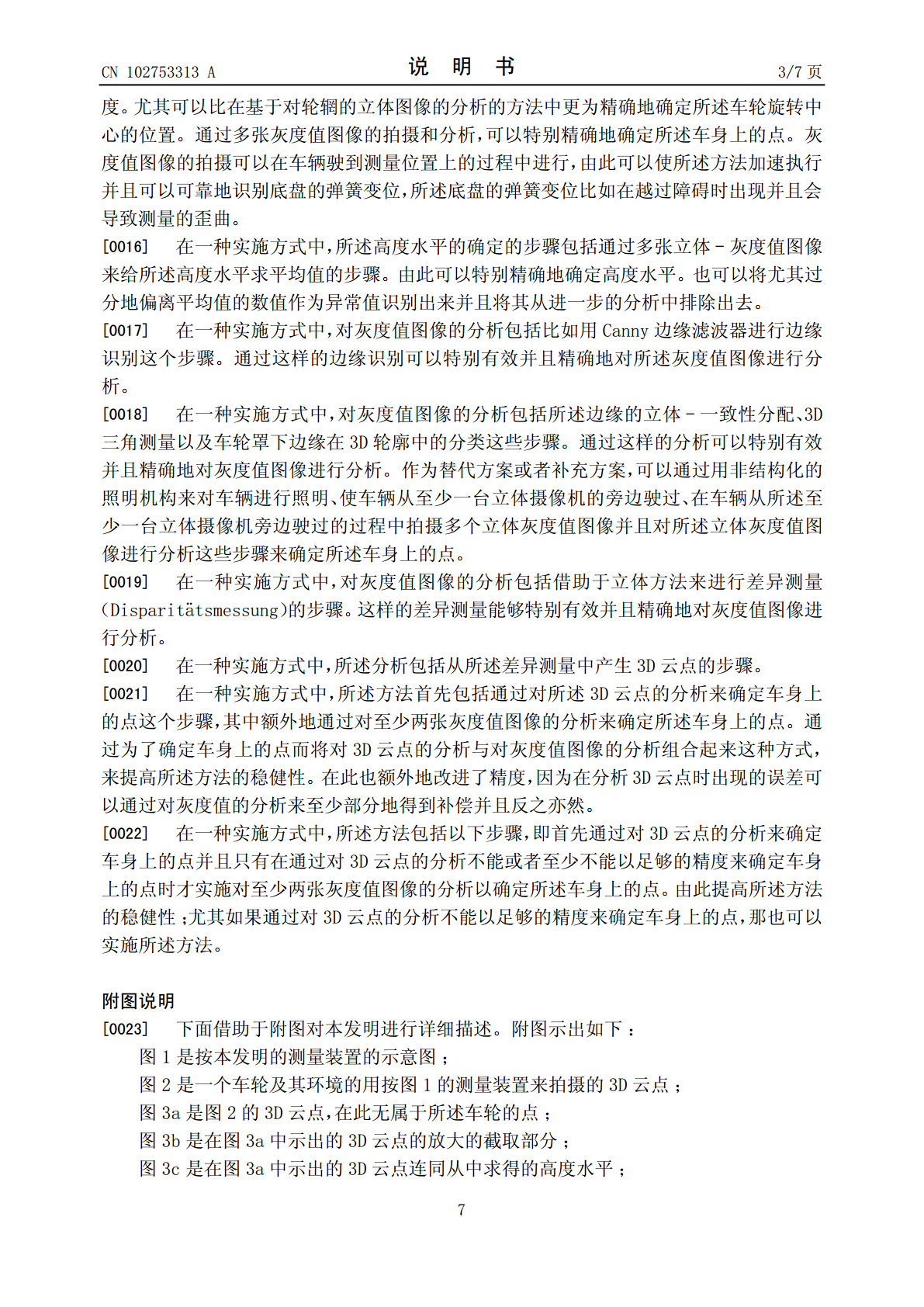
按本发明的方法,用于确定用于对具有车身(3)和至少一个车轮(2)的车辆(1)进行底盘测量的间距,尤其用于确定高度水平(h),该方法包括通过将结构化的光图案至少投影到所述车辆的车轮(2)上这种方式来确定所述车轮(2)的车轮旋转中心(Z)、用经过校准的成像的传感系统来拍摄由所述车轮(2)反射的光图案、从所反射的光图案中确定3D云点并且从所述3D云点中确定所述车轮旋转中心(Z)这些步骤。所述方法也包括通过对以前确定的3D云点的分析或者通过对多个在进行非结构化的照明时拍摄的灰度值图像的分析来确定车身(3)上的点(
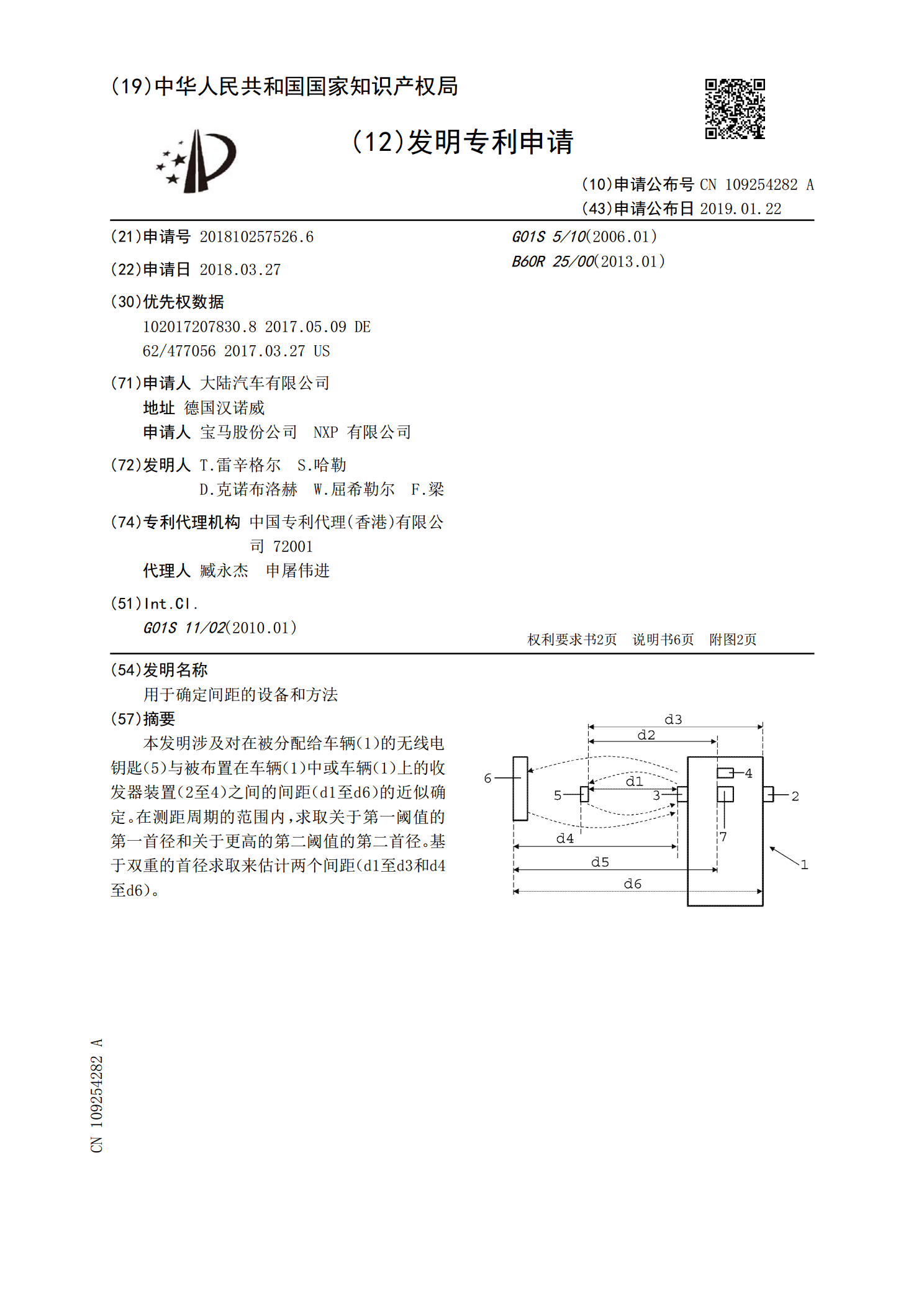
用于确定间距的设备和方法.pdf
本发明涉及对在被分配给车辆(1)的无线电钥匙(5)与被布置在车辆(1)中或车辆(1)上的收发器装置(2至4)之间的间距(d1至d6)的近似确定。在测距周期的范围内,求取关于第一阈值的第一首径和关于更高的第二阈值的第二首径。基于双重的首径求取来估计两个间距(d1至d3和d4至d6)。

用于确定对象的间距和速度的方法.pdf
本发明涉及一种用于确定对象相对于测量位置的间距和径向速度的方法,其中,所述方法具有以下步骤:a)发送第一发送信号,所述第一发送信号是以第一频率斜坡形式的雷达辐射;b)发送第二发送信号,所述第二发送信号是以第二频率斜坡形式的雷达辐射,其中,所述第二频率斜坡与所述第一频率斜坡不同;c)接收接收信号,所述接收信号是在所述对象上反射的第一和第二发送信号;d)将所述接收信号与所述第一或第二发送信号混频成混频信号;e)由所述混频信号创建距离/多普勒矩阵;f)探测来自于所述对象的径向速度的两个多普勒频率;以及g)分析处
用于光学确定间距的方法和设备.pdf
本发明涉及一种用于光学确定构造在设备(1)上的开口(7)与参考面(8)之间的间距(A)的方法,所述方法包括以下步骤:借助于至少一个照射射束(17a,17b)穿过所述开口(7)地照射所述参考面(8),所述照射射束以一角(α、‑α’)穿过所述开口(7);穿过所述开口(7)地拍摄所述参考面(8)的至少一个图像(24);以及在至少一个所拍摄的图像(24)中根据所述参考面(8)的由所述照射射束(17a,17b)照射的区域(22)与所述开口(7)的边缘轮廓(9)之间的错位(V)确定所述间距(A)。本发明也涉及一种用于
用于确定车辆上轮胎的胎面深度的方法、控制装置和系统.pdf
本发明涉及用于车辆上的轮胎的胎面深度确定。其涉及多辆车辆将相应的适配数据传输到中央数据处理装置,并且所述数据处理装置基于适配数据形成优化数据并且将所述优化数据传输到车辆。所述适配数据由车辆基于轮胎的轮胎类型、里程和旋转速度以及车辆的速度和轮胎的至少一个操作参数来形成,所述操作参数选自轮胎压力、轮胎温度和轮胎负载,并且优化数据由车辆中的每一者使用,以基于所确定的轮胎类型的包含至少一个模型参数的模型来确定相关轮胎的胎面深度,其中,所述模型基于轮胎的旋转速度、车辆的速度和轮胎的所述至少一个操作参数使用所述至少一