
搬运器的控制方法、搬运器及具有存储功能的装置.pdf

是你****馨呀

1/10
2/10
3/10
4/10
5/10

6/10
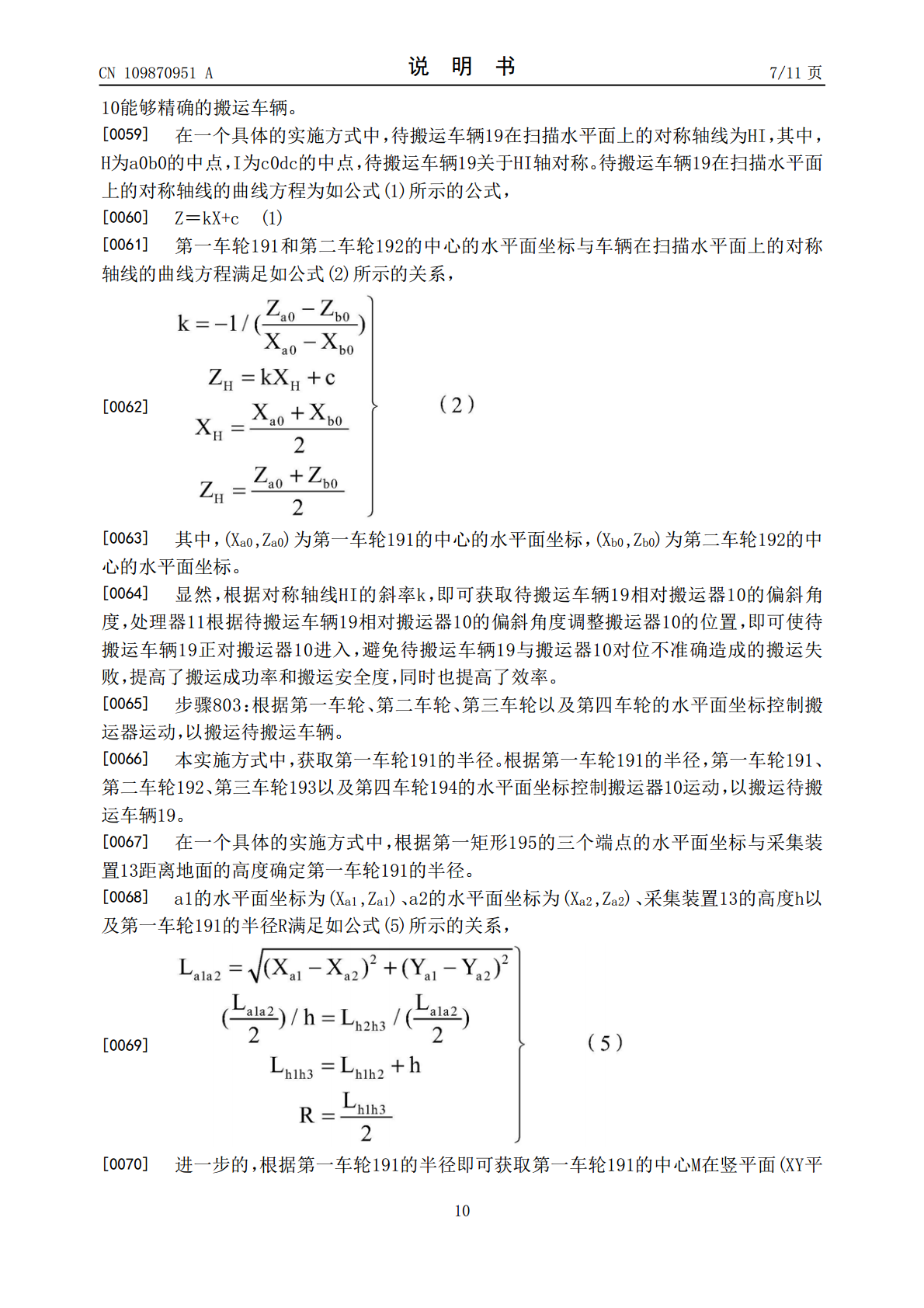
7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
搬运器的控制方法、搬运器及具有存储功能的装置.pdf
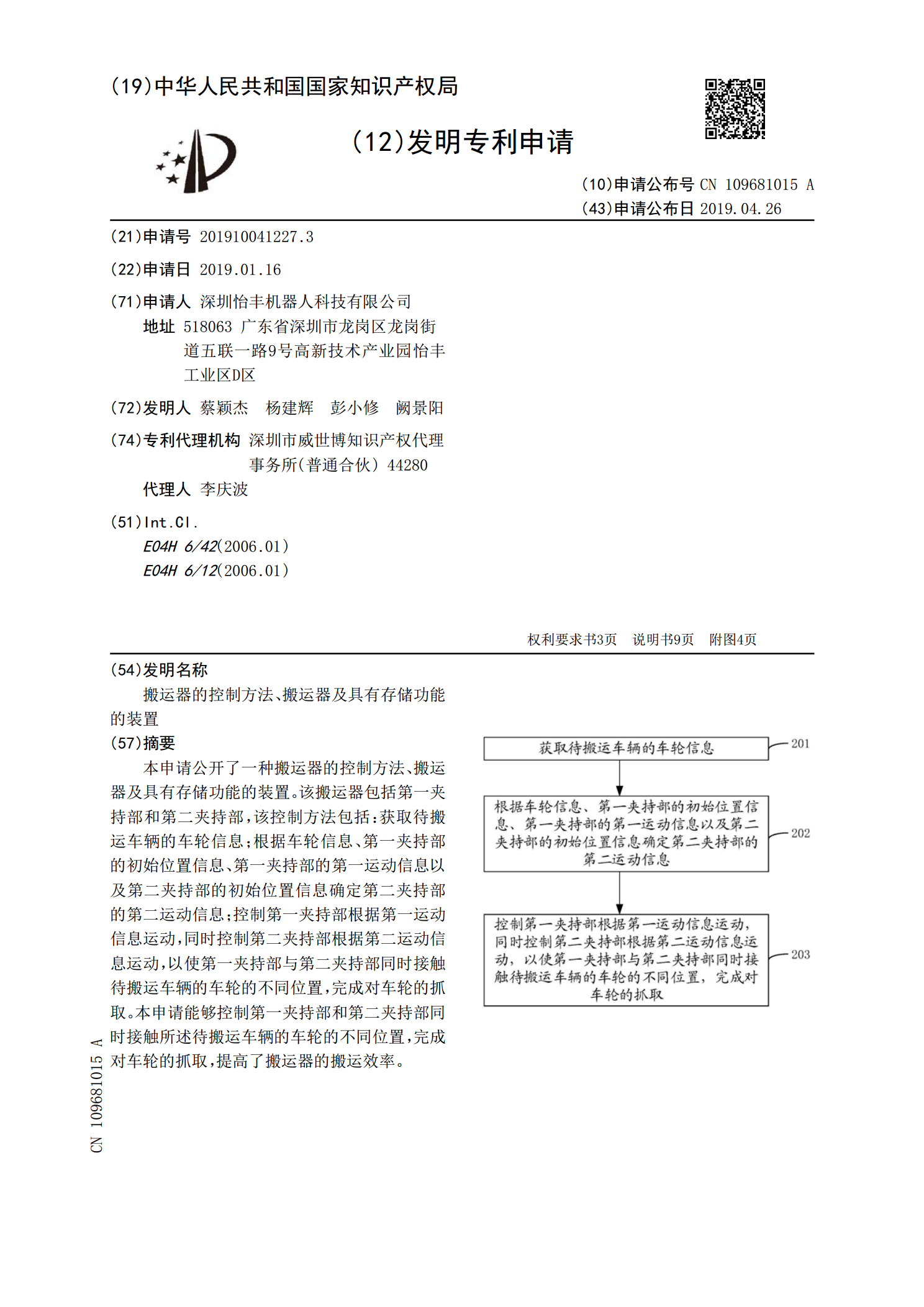
本申请公开了一种搬运器的控制方法、搬运器及具有存储功能的装置。该搬运器包括第一夹持部和第二夹持部,该控制方法包括:获取待搬运车辆的车轮信息;根据车轮信息、第一夹持部的初始位置信息、第一夹持部的第一运动信息以及第二夹持部的初始位置信息确定第二夹持部的第二运动信息;控制第一夹持部根据第一运动信息运动,同时控制第二夹持部根据第二运动信息运动,以使第一夹持部与第二夹持部同时接触待搬运车辆的车轮的不同位置,完成对车轮的抓取。本申请能够控制第一夹持部和第二夹持部同时接触所述待搬运车辆的车轮的不同位置,完成对车轮的抓取
搬运器的控制方法、搬运器及具有存储功能的装置.pdf
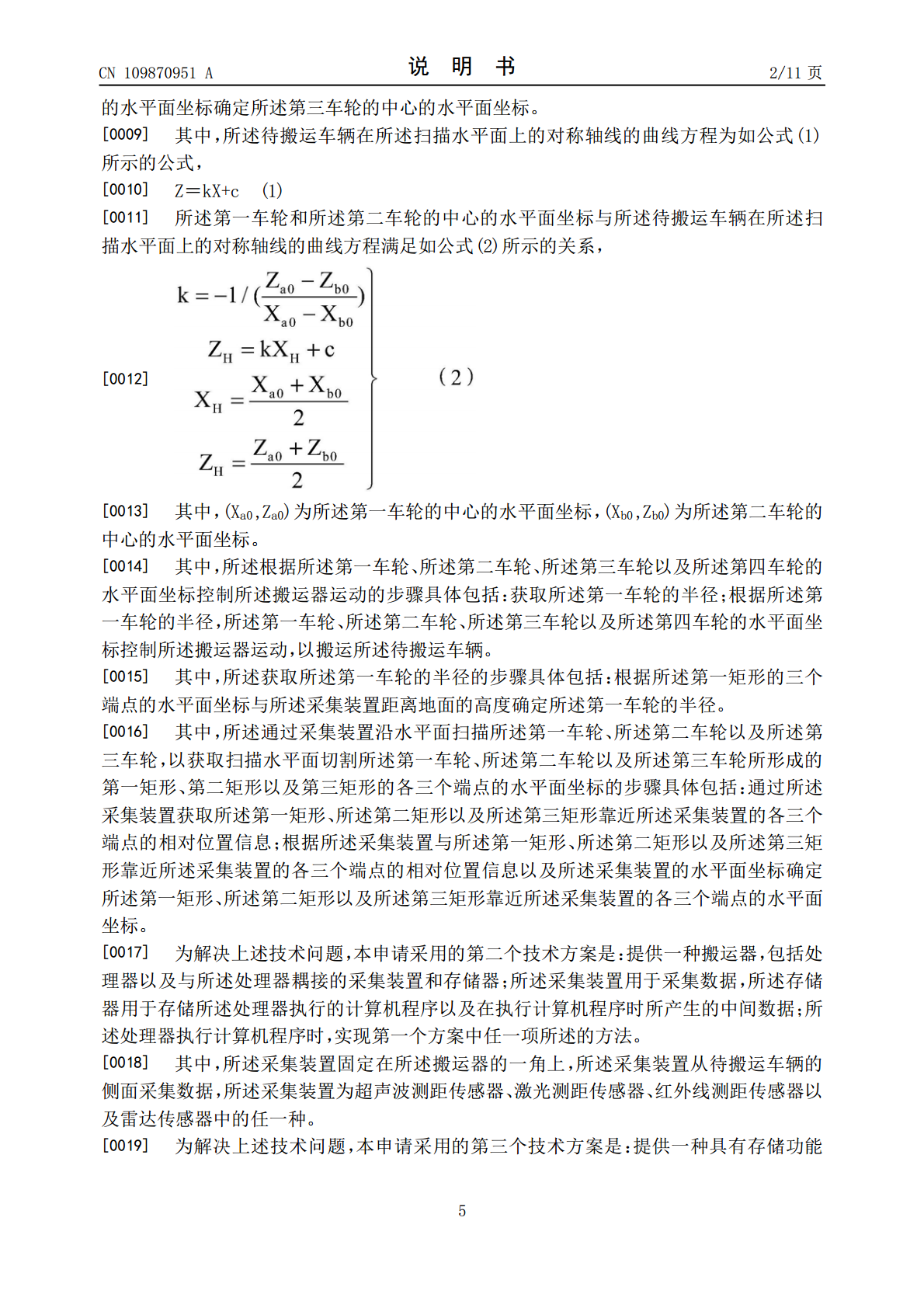
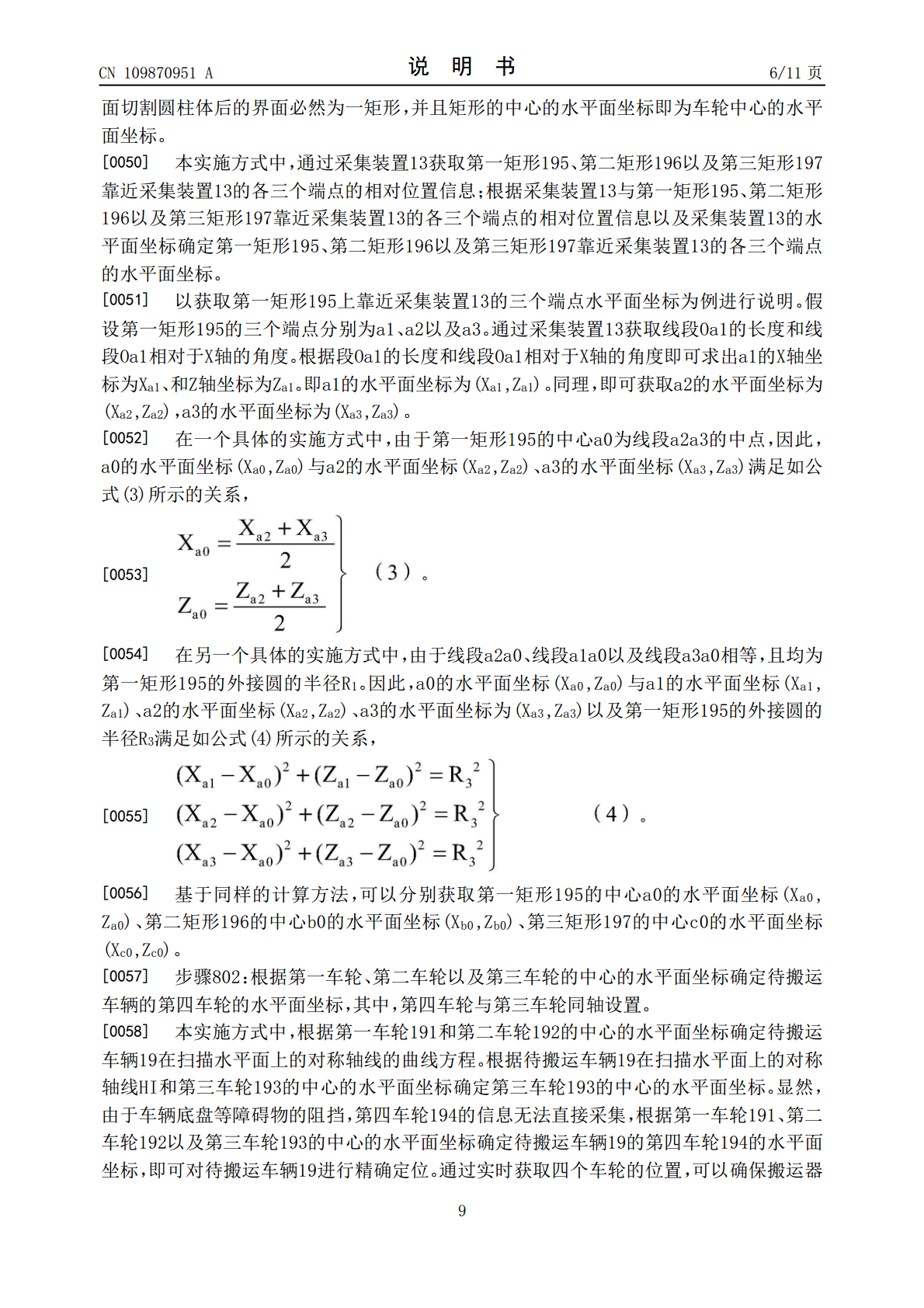
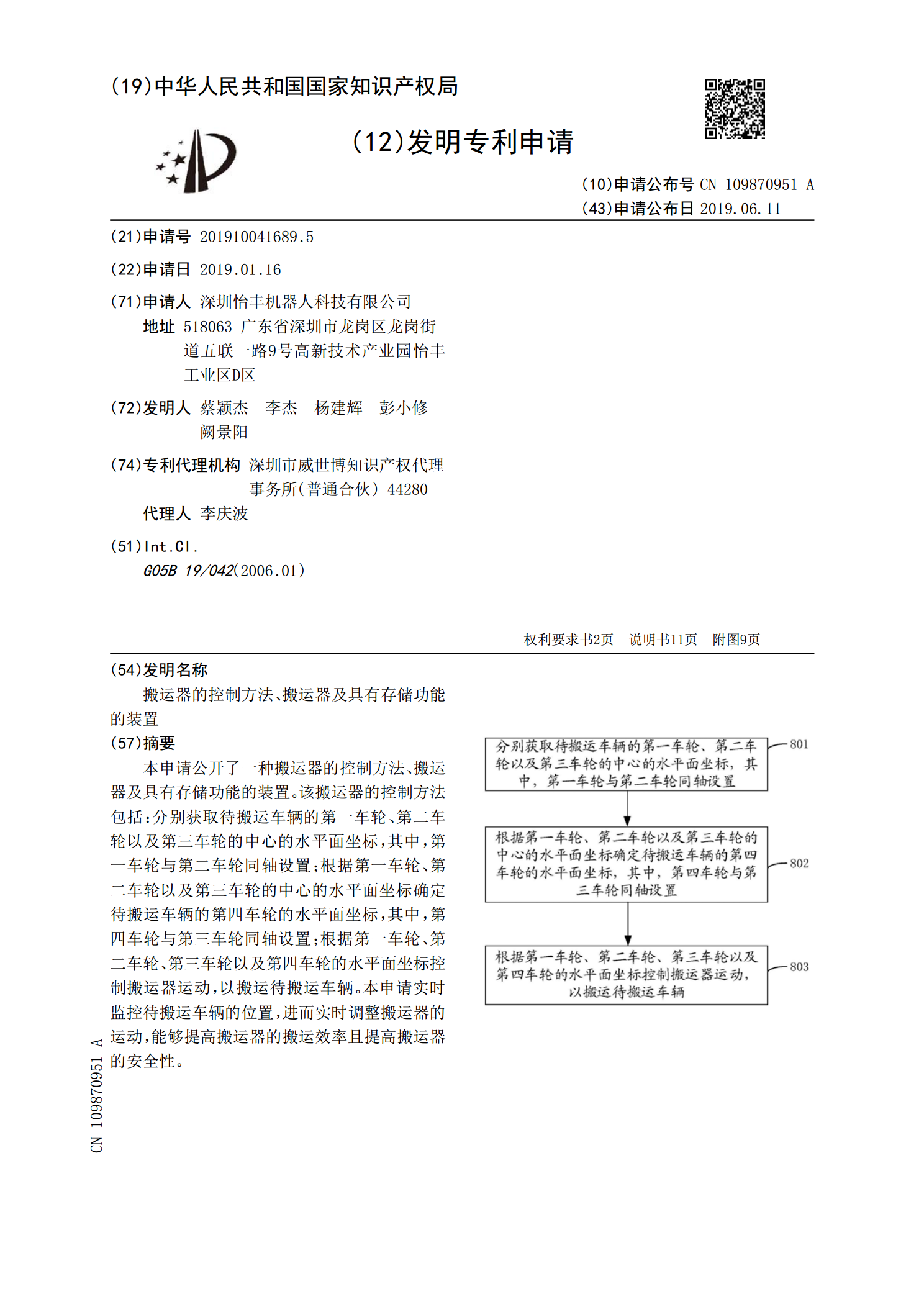
本申请公开了一种搬运器的控制方法、搬运器及具有存储功能的装置。该搬运器的控制方法包括:分别获取待搬运车辆的第一车轮、第二车轮以及第三车轮的中心的水平面坐标,其中,第一车轮与第二车轮同轴设置;根据第一车轮、第二车轮以及第三车轮的中心的水平面坐标确定待搬运车辆的第四车轮的水平面坐标,其中,第四车轮与第三车轮同轴设置;根据第一车轮、第二车轮、第三车轮以及第四车轮的水平面坐标控制搬运器运动,以搬运待搬运车辆。本申请实时监控待搬运车辆的位置,进而实时调整搬运器的运动,能够提高搬运器的搬运效率且提高搬运器的安全性。
搬运装置及车辆搬运器.pdf
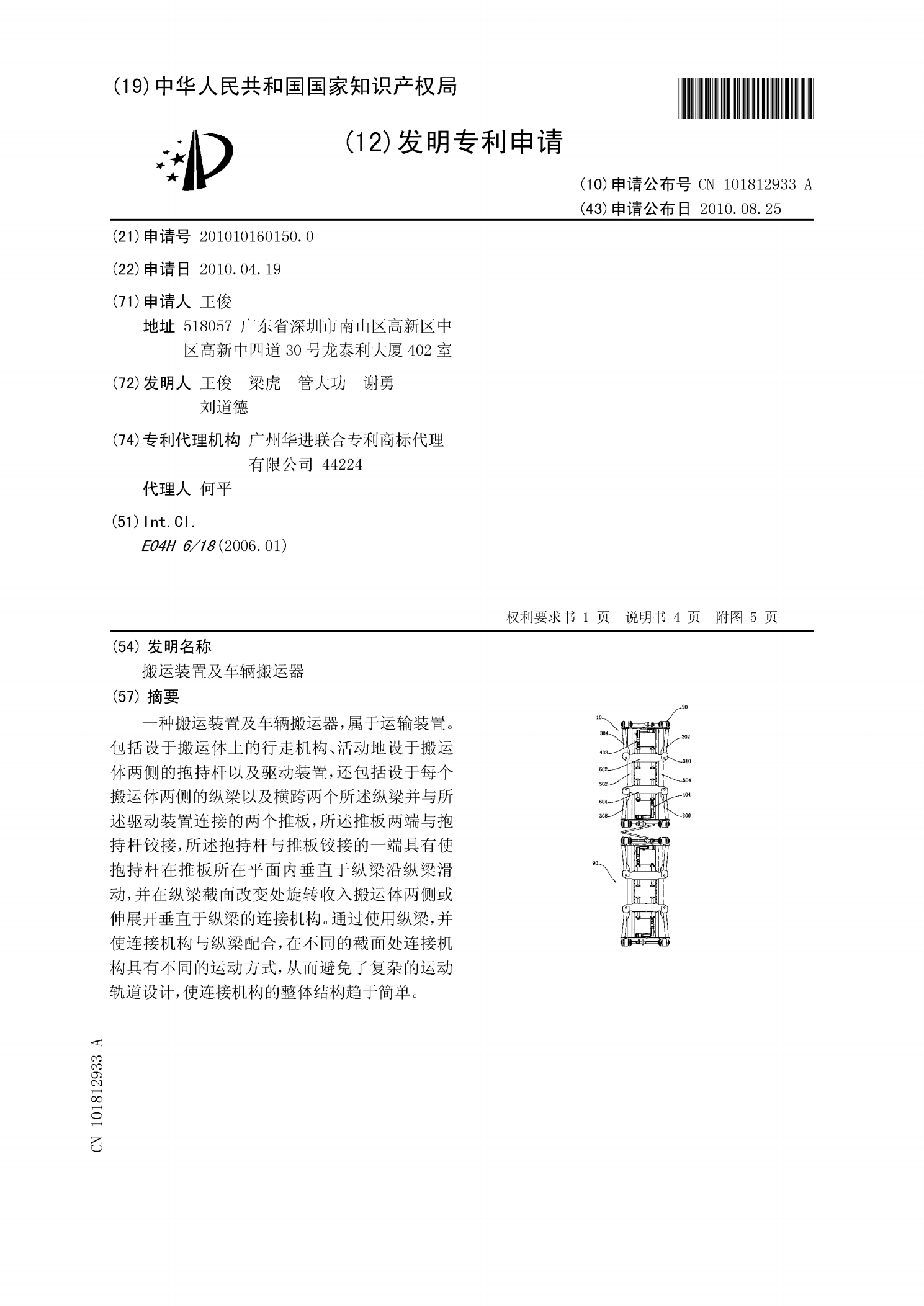
一种搬运装置及车辆搬运器,属于运输装置。包括设于搬运体上的行走机构、活动地设于搬运体两侧的抱持杆以及驱动装置,还包括设于每个搬运体两侧的纵梁以及横跨两个所述纵梁并与所述驱动装置连接的两个推板,所述推板两端与抱持杆铰接,所述抱持杆与推板铰接的一端具有使抱持杆在推板所在平面内垂直于纵梁沿纵梁滑动,并在纵梁截面改变处旋转收入搬运体两侧或伸展开垂直于纵梁的连接机构。通过使用纵梁,并使连接机构与纵梁配合,在不同的截面处连接机构具有不同的运动方式,从而避免了复杂的运动轨道设计,使连接机构的整体结构趋于简单。
端拾器控制方法、端拾器装置、搬运机器人及存储介质.pdf
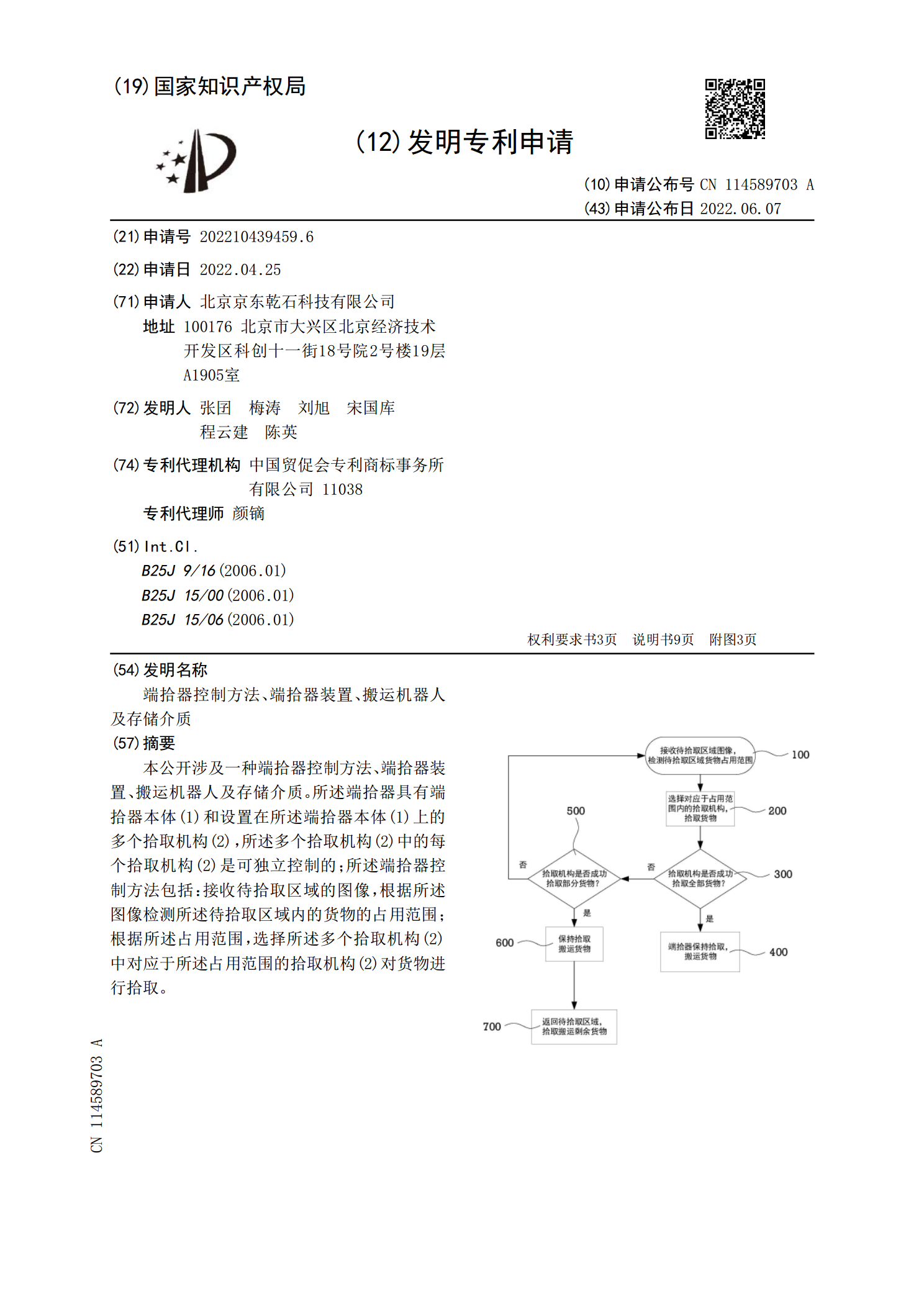
本公开涉及一种端拾器控制方法、端拾器装置、搬运机器人及存储介质。所述端拾器具有端拾器本体(1)和设置在所述端拾器本体(1)上的多个拾取机构(2),所述多个拾取机构(2)中的每个拾取机构(2)是可独立控制的;所述端拾器控制方法包括:接收待拾取区域的图像,根据所述图像检测所述待拾取区域内的货物的占用范围;根据所述占用范围,选择所述多个拾取机构(2)中对应于所述占用范围的拾取机构(2)对货物进行拾取。
货物搬运方法、装置、服务器以及搬运机器人.pdf
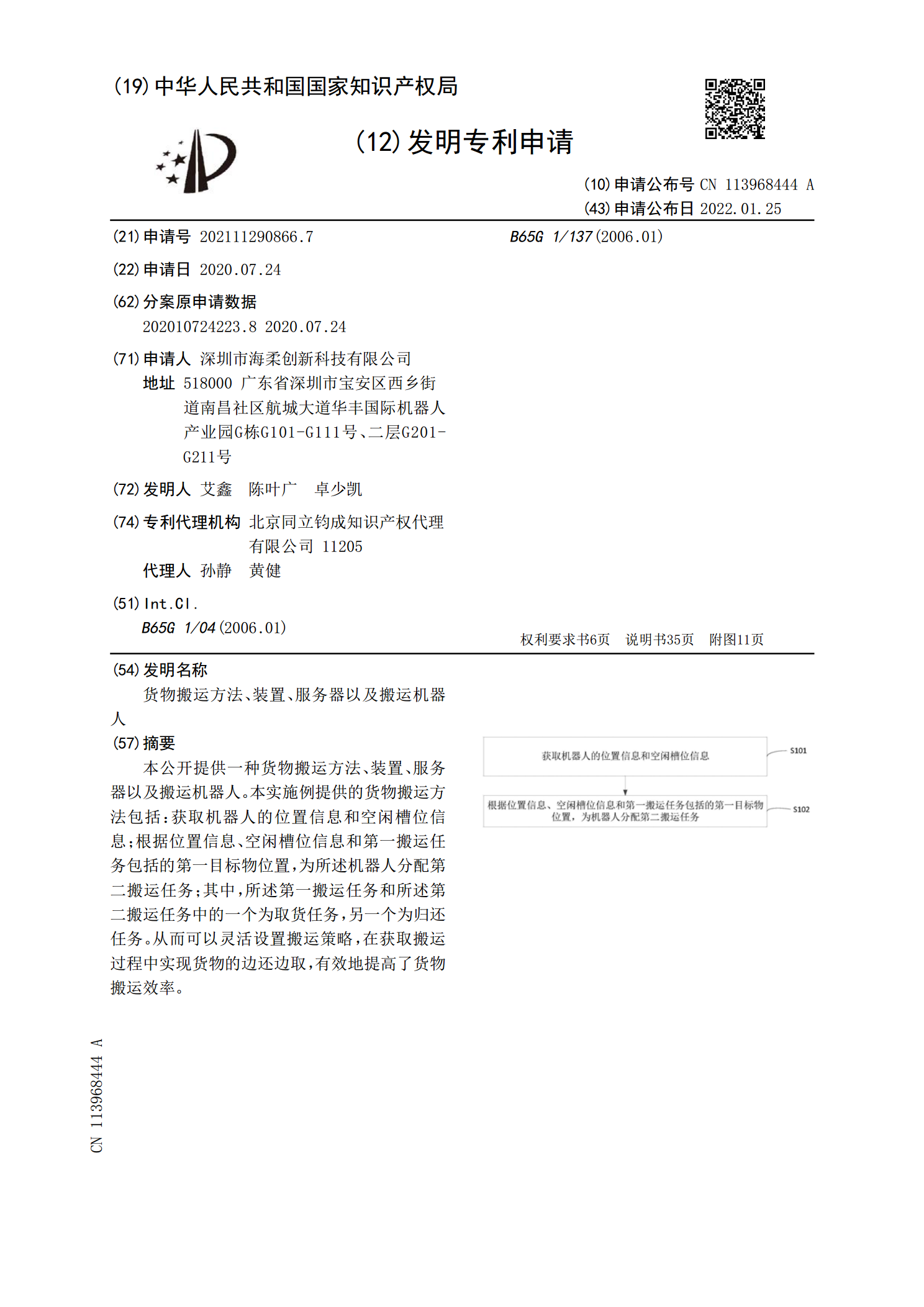
本公开提供一种货物搬运方法、装置、服务器以及搬运机器人。本实施例提供的货物搬运方法包括:获取机器人的位置信息和空闲槽位信息;根据位置信息、空闲槽位信息和第一搬运任务包括的第一目标物位置,为所述机器人分配第二搬运任务;其中,所述第一搬运任务和所述第二搬运任务中的一个为取货任务,另一个为归还任务。从而可以灵活设置搬运策略,在获取搬运过程中实现货物的边还边取,有效地提高了货物搬运效率。