
货物搬运方法、装置、服务器以及搬运机器人.pdf

努力****凌芹


1/10

2/10
3/10
4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共53页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
货物搬运方法、装置、服务器以及搬运机器人.pdf
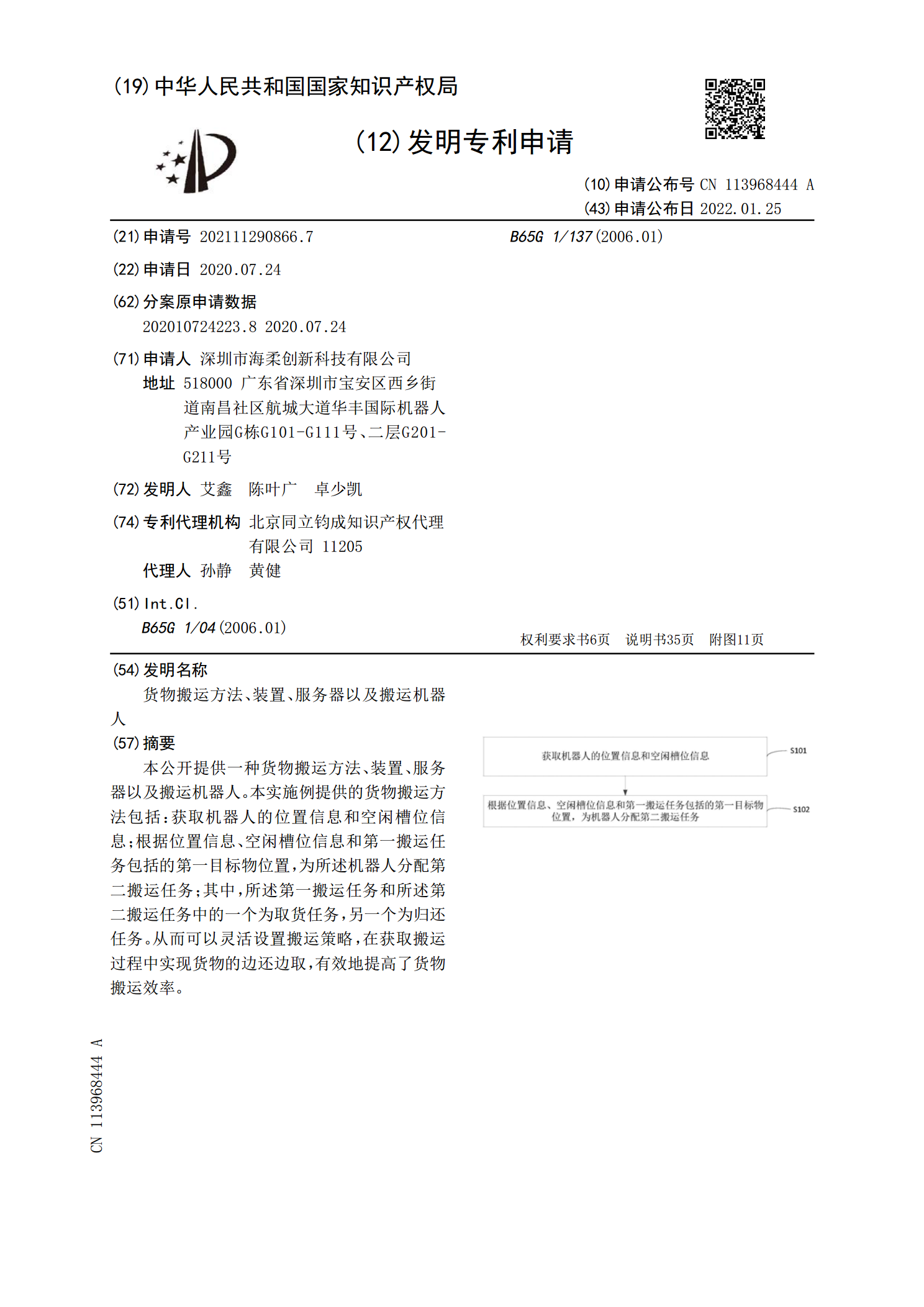
本公开提供一种货物搬运方法、装置、服务器以及搬运机器人。本实施例提供的货物搬运方法包括:获取机器人的位置信息和空闲槽位信息;根据位置信息、空闲槽位信息和第一搬运任务包括的第一目标物位置,为所述机器人分配第二搬运任务;其中,所述第一搬运任务和所述第二搬运任务中的一个为取货任务,另一个为归还任务。从而可以灵活设置搬运策略,在获取搬运过程中实现货物的边还边取,有效地提高了货物搬运效率。

机器人、货物搬运方法、服务器以及仓储系统.pdf
本公开提供一种机器人、货物搬运方法、服务器以及仓储系统。本实施例提供的机器人包括:移动底座、机器人货架、升降装置和物品搬运装置,机器人货架安装于移动底座上;移动底座,配置为移动至第一搬运任务包括的第一目标物位置,及移动至第二搬运任务包括的第二目标物位置;第一搬运任务和第二搬运任务中的一个为取货任务,另一个为归还任务;升降装置和物品搬运装置安装在机器人货架上,其中,机器人在执行第一搬运任务过程中,执行第二搬运任务。从而可以灵活设置搬运策略,在获取搬运过程中实现货物的边还边取,有效地提高了货物搬运效率。
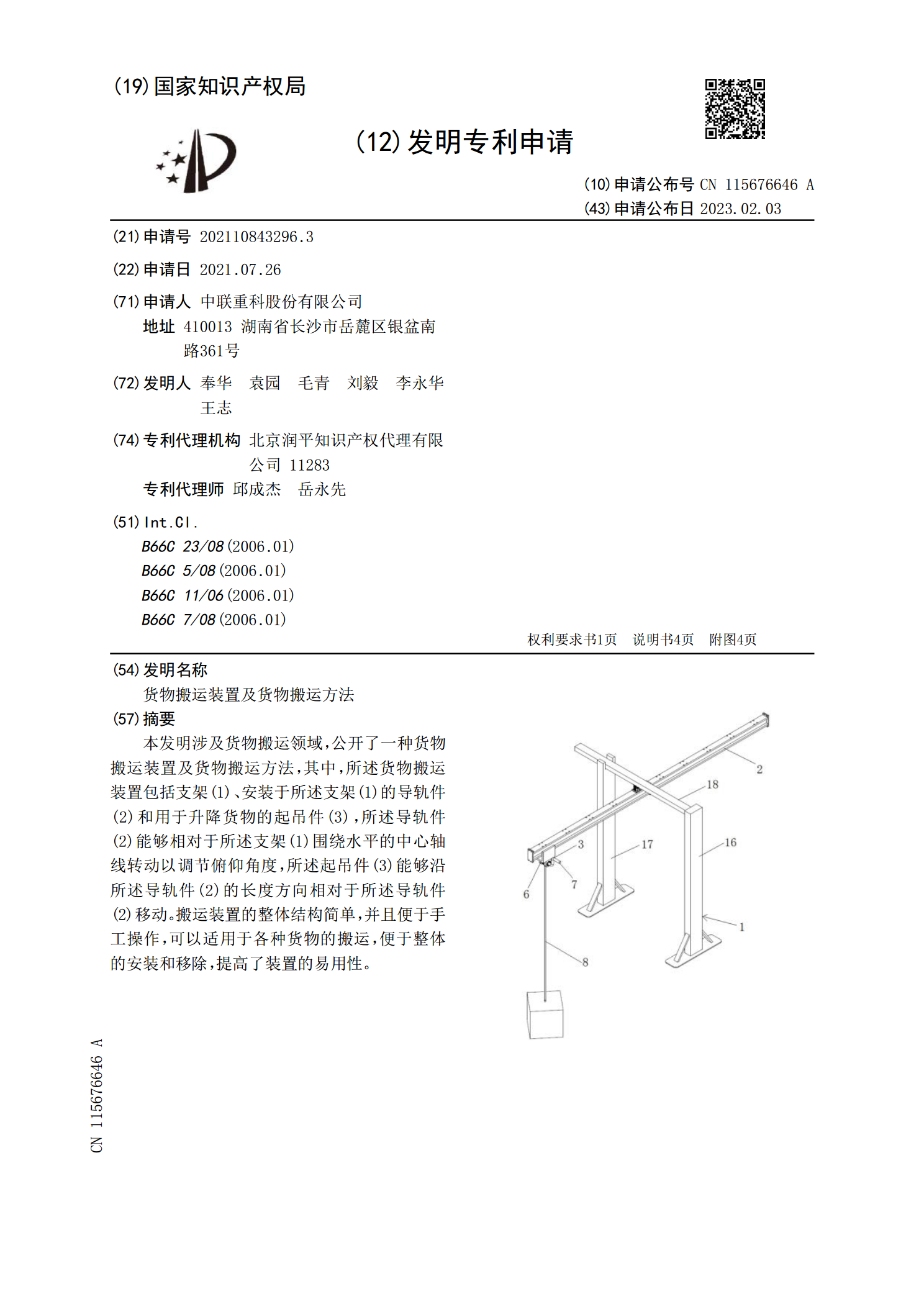
货物搬运装置及货物搬运方法.pdf
本发明涉及货物搬运领域,公开了一种货物搬运装置及货物搬运方法,其中,所述货物搬运装置包括支架(1)、安装于所述支架(1)的导轨件(2)和用于升降货物的起吊件(3),所述导轨件(2)能够相对于所述支架(1)围绕水平的中心轴线转动以调节俯仰角度,所述起吊件(3)能够沿所述导轨件(2)的长度方向相对于所述导轨件(2)移动。搬运装置的整体结构简单,并且便于手工操作,可以适用于各种货物的搬运,便于整体的安装和移除,提高了装置的易用性。

搬运机器人、货物存放箱以及货物搬运系统.pdf
本公开涉及一种搬运机器人,所述搬运机器人包括吸附机构以及翻转机构,能够在不需要在搬运对象的下方以及四周预设预留空间并且不引起待搬运的搬运对象的形变的条件下主动获取搬运对象。此外,本公开涉及一种货物存放箱,所述货物存放箱能够与所述搬运机器人配合使用,以实现搬运机器人对所述货物存放箱的准确并且牢固的获取。此外,本公开还涉及一种货物搬运系统,所述货物搬运系统包括所述搬运机器人和所述货物存放箱,所述搬运机器人能够在不需要在所述货物存放箱的下方以及四周预设预留空间的条件下实现对所述货物存放箱的获取以及搬运。

工件搬运装置以及搬运方法.pdf
本发明提供能够防止被搬运的工件发生蠕动、并且能够容易进行工件向升降器的转移的工件搬运装置以及搬运方法。本发明的工件搬运装置具备:以悬臂构造安装有多个工件搬运用的驱动辊(4)的左右的辊架(2);相互独立地安装于各个辊架(2)的减速马达(7);通过各减速马达(7)并经由具有各自的驱动辊(4)的链轮(5)来驱动各辊的设置于各辊架(2)的滚子链(6)。另外,通过驱动器能够将左右的辊架(2)以将各辊架(2)支承为能够旋转的旋转轴(9)为中心进行开闭。