
端拾器控制方法、端拾器装置、搬运机器人及存储介质.pdf

俊凤****bb

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
端拾器控制方法、端拾器装置、搬运机器人及存储介质.pdf
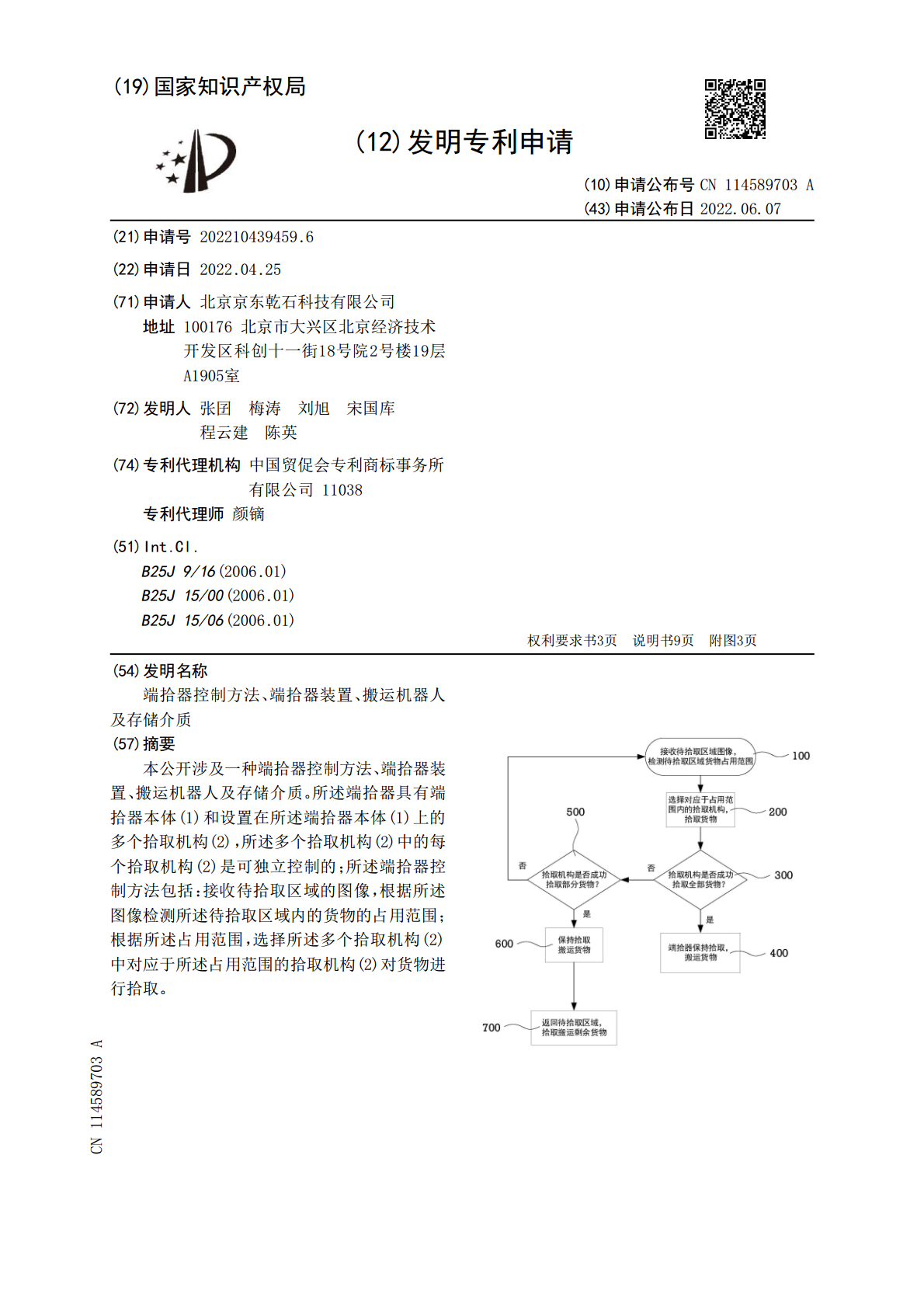
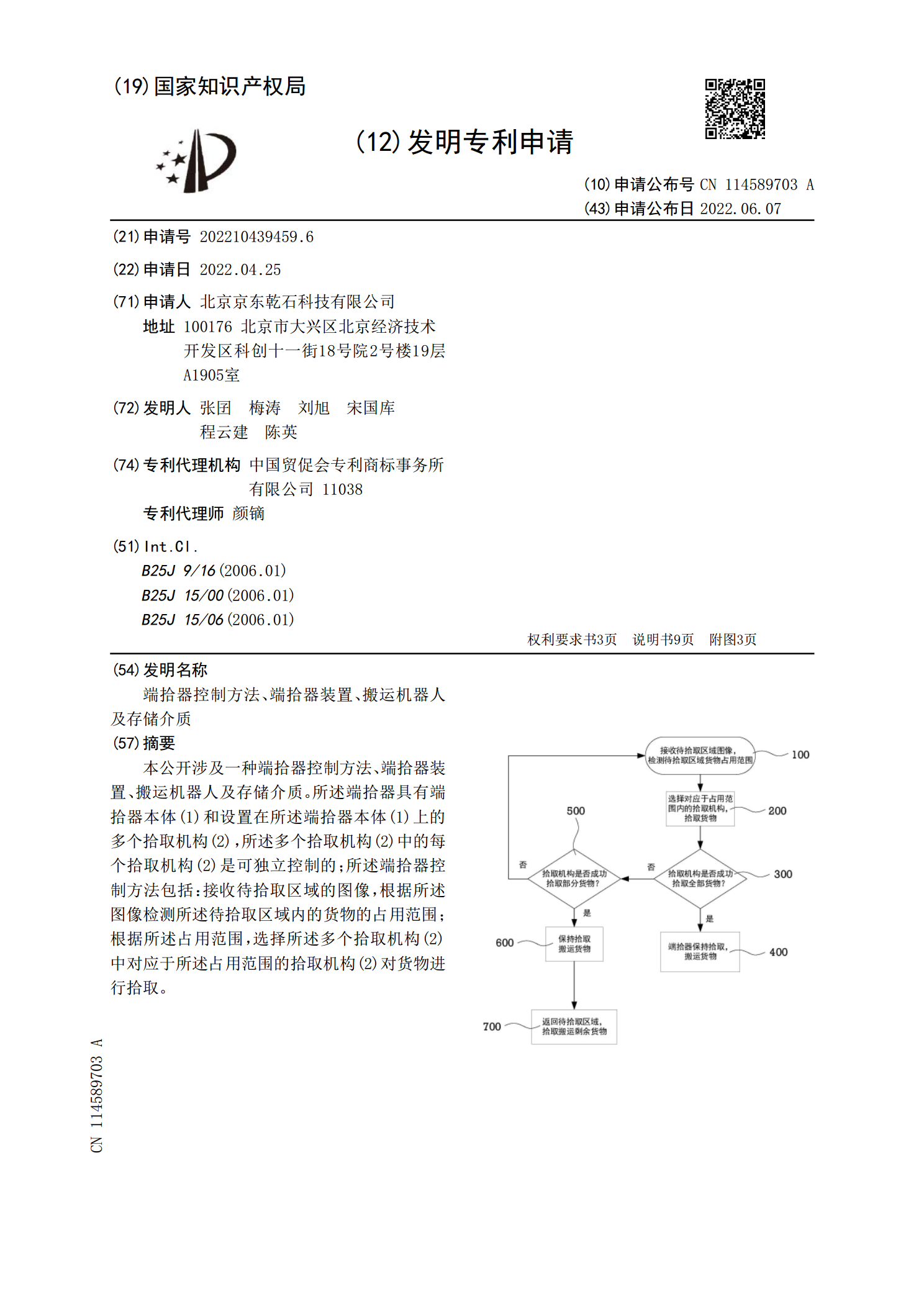
本公开涉及一种端拾器控制方法、端拾器装置、搬运机器人及存储介质。所述端拾器具有端拾器本体(1)和设置在所述端拾器本体(1)上的多个拾取机构(2),所述多个拾取机构(2)中的每个拾取机构(2)是可独立控制的;所述端拾器控制方法包括:接收待拾取区域的图像,根据所述图像检测所述待拾取区域内的货物的占用范围;根据所述占用范围,选择所述多个拾取机构(2)中对应于所述占用范围的拾取机构(2)对货物进行拾取。
机器人端拾器.pdf
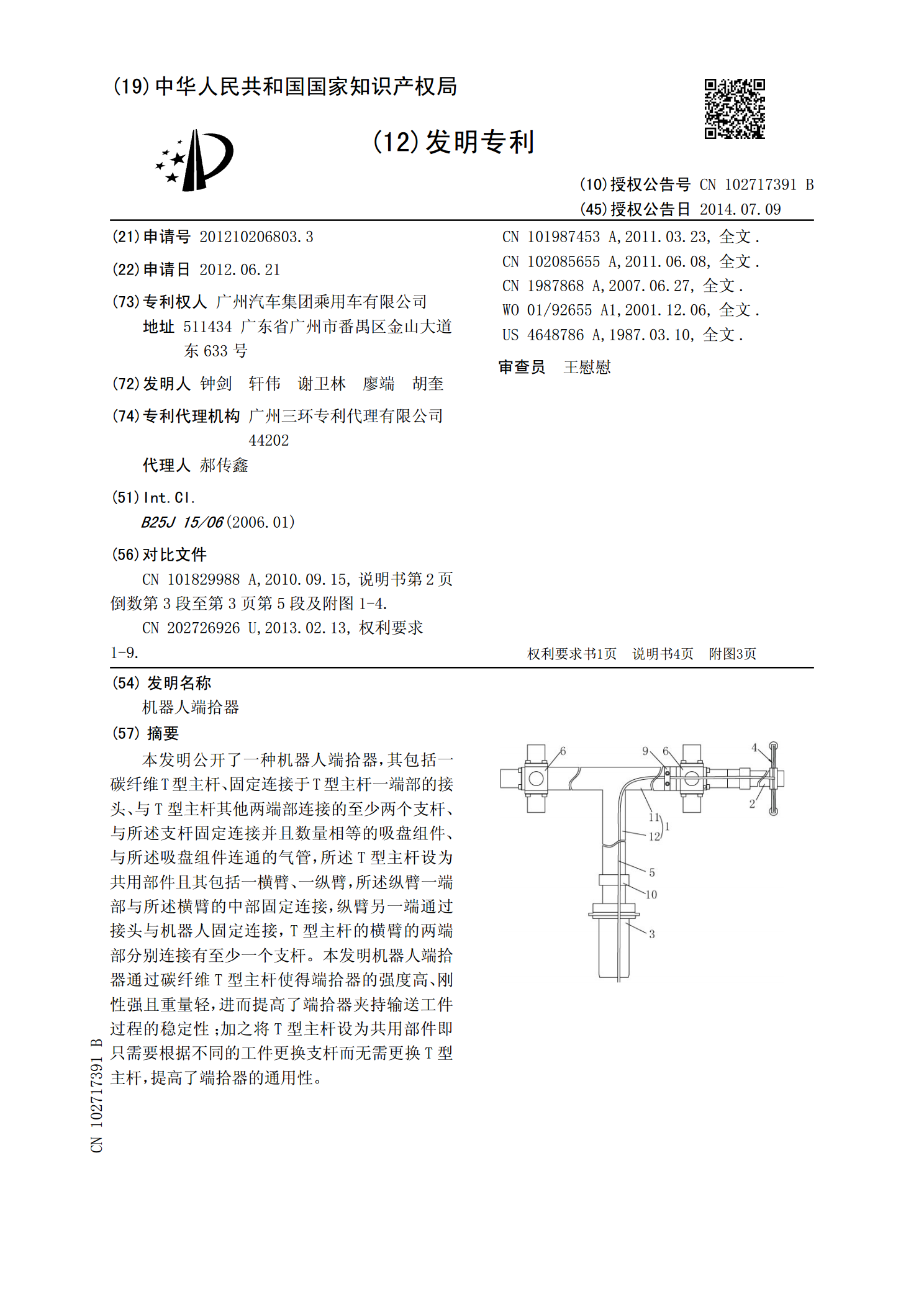
本发明公开了一种机器人端拾器,其包括一碳纤维T型主杆、固定连接于T型主杆一端部的接头、与T型主杆其他两端部连接的至少两个支杆、与所述支杆固定连接并且数量相等的吸盘组件、与所述吸盘组件连通的气管,所述T型主杆设为共用部件且其包括一横臂、一纵臂,所述纵臂一端部与所述横臂的中部固定连接,纵臂另一端通过接头与机器人固定连接,T型主杆的横臂的两端部分别连接有至少一个支杆。本发明机器人端拾器通过碳纤维T型主杆使得端拾器的强度高、刚性强且重量轻,进而提高了端拾器夹持输送工件过程的稳定性;加之将T型主杆设为共用部件即只需

端拾器资料.ppt
端拾器资料主要内容端拾器形式端拾器形式端拾器形式端拾器形式端拾器形式端拾器形式端拾器形式端拾器形式端拾器形式端拾器形式端拾器组成端拾器组成端拾器组成端拾器的组成端拾器的组成端拾器组成存在的问题存在的问题存在的问题存在的问题存在的问题存在的问题我们要做的工作我们要做的工作我们要做的工作over

端拾器资料0.ppt
端拾器资料主要内容端拾器形式端拾器形式端拾器形式端拾器形式端拾器形式端拾器形式端拾器形式端拾器形式端拾器形式端拾器形式端拾器组成端拾器组成端拾器组成端拾器的组成端拾器的组成端拾器组成存在的问题存在的问题存在的问题存在的问题存在的问题存在的问题我们要做的工作我们要做的工作我们要做的工作over

端拾器资料ppt课件.ppt
端拾器资料主要内容端拾器形式端拾器形式端拾器形式端拾器形式端拾器形式端拾器形式端拾器形式端拾器形式端拾器形式端拾器形式端拾器组成端拾器组成端拾器组成端拾器的组成端拾器的组成端拾器组成存在的问题存在的问题存在的问题存在的问题存在的问题存在的问题我们要做的工作我们要做的工作我们要做的工作over感谢亲观看此幻灯片,此课件部分内容来源于网络,如有侵权请及时联系我们删除,谢谢配合!