
无人越障车.pdf

书生****12

1/10
2/10
3/10
4/10

5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无人越障车.pdf
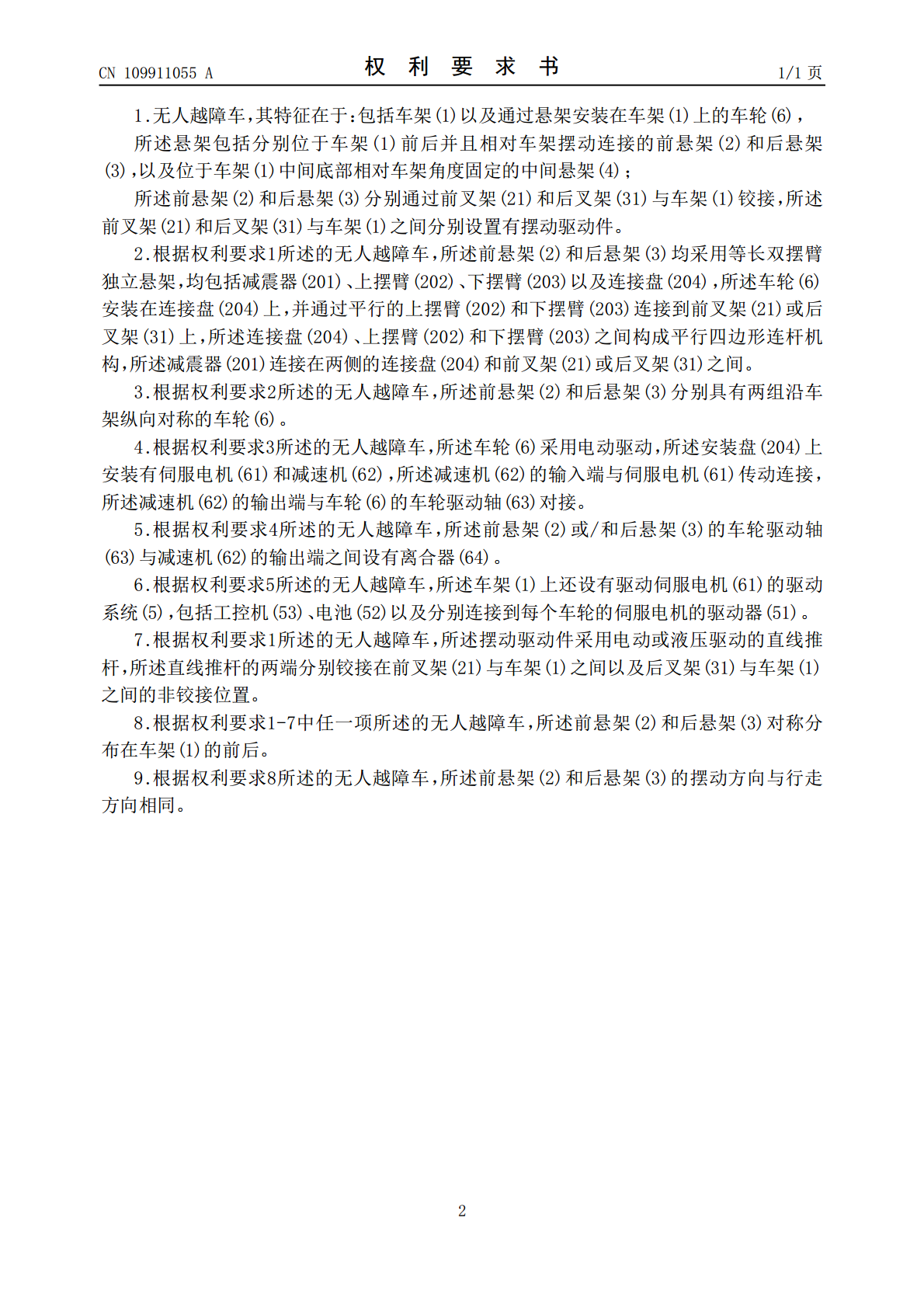
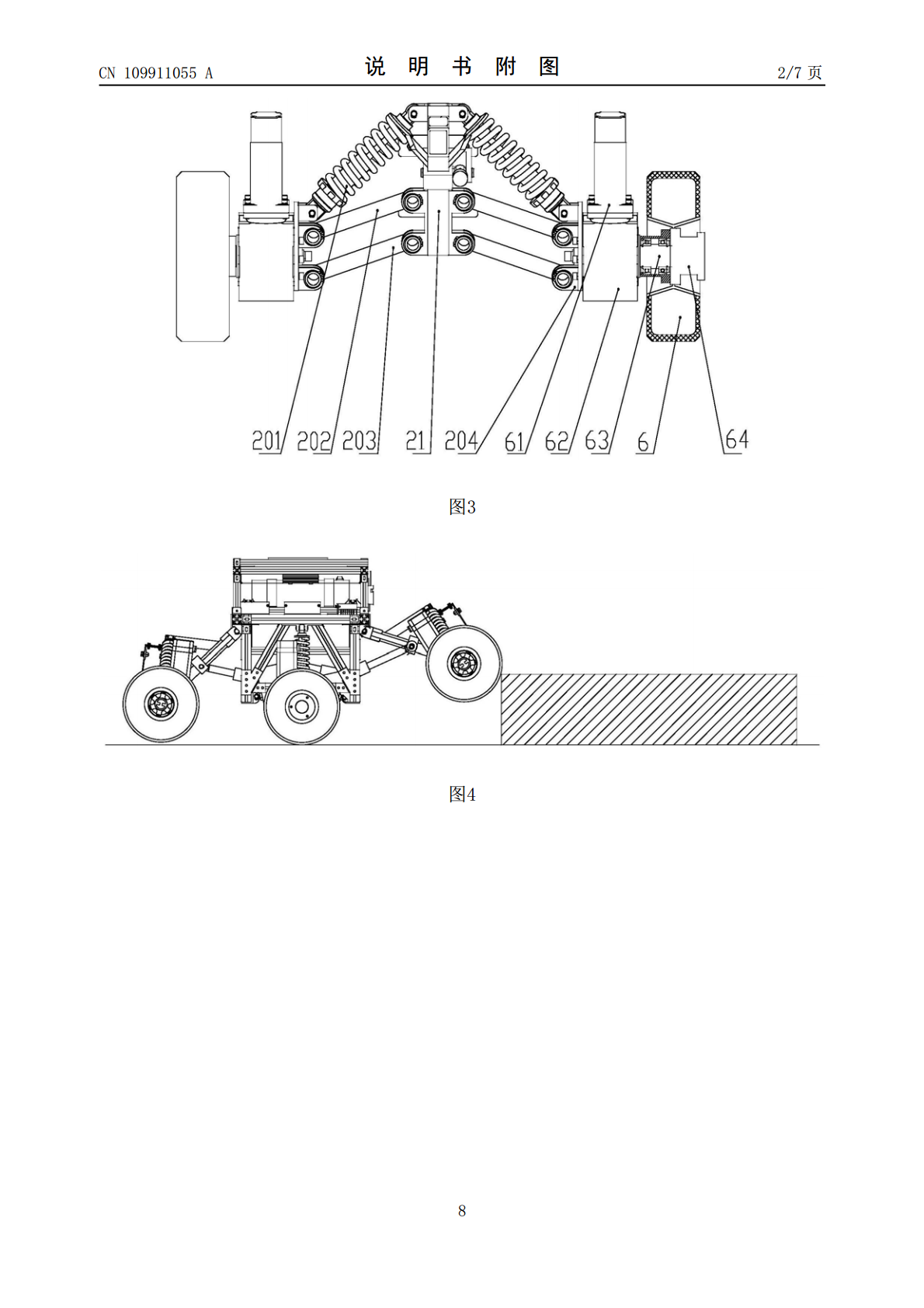
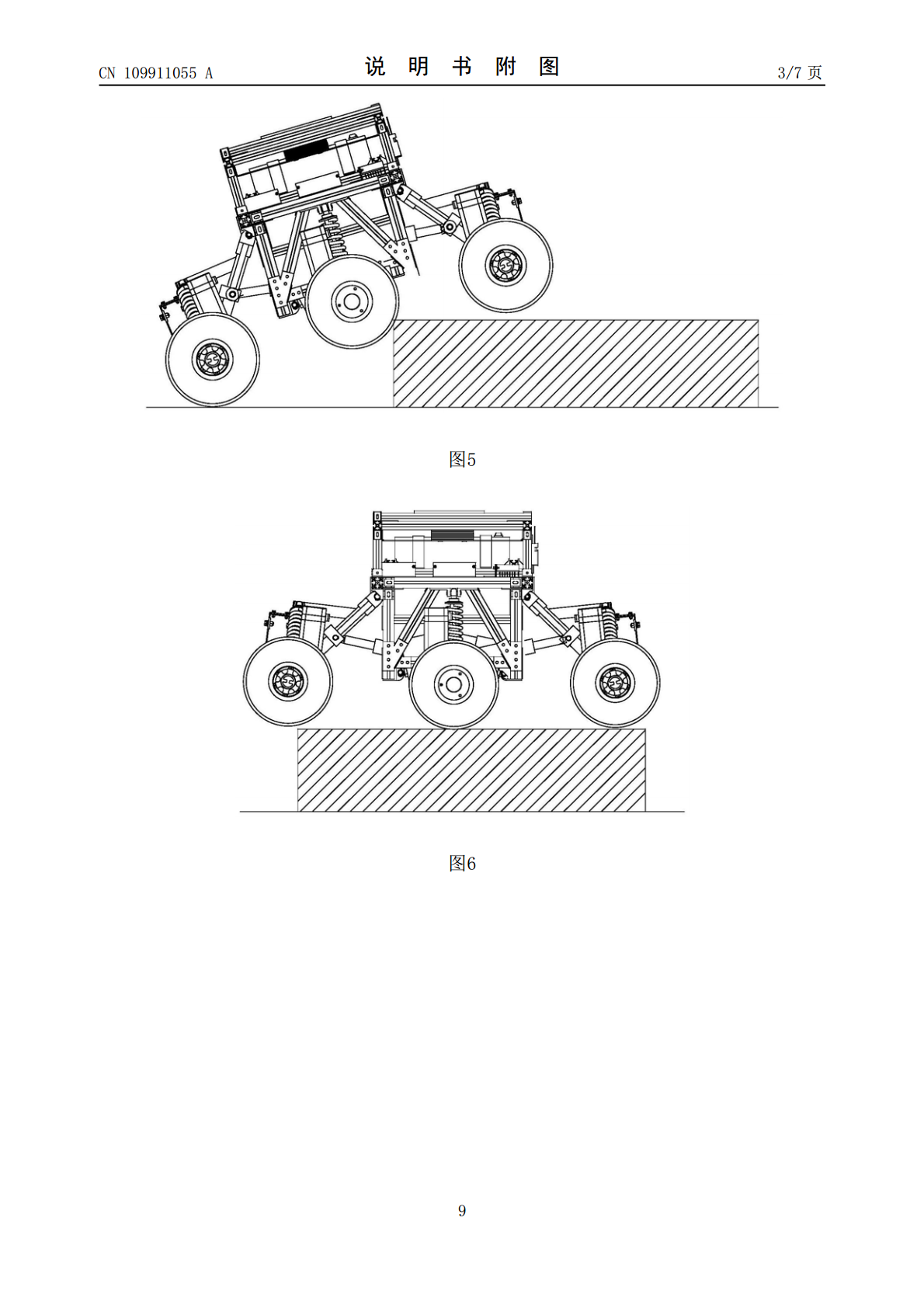
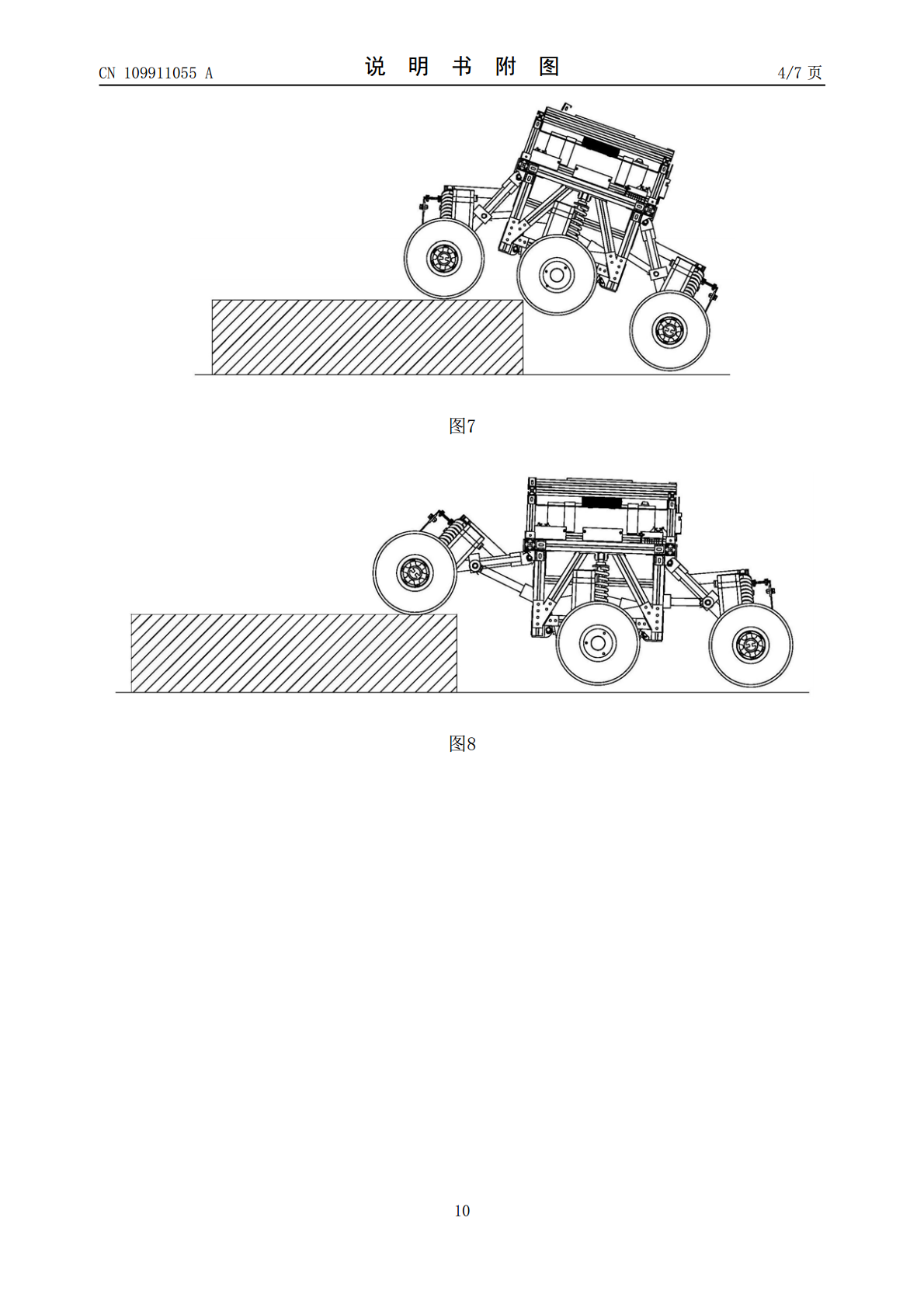
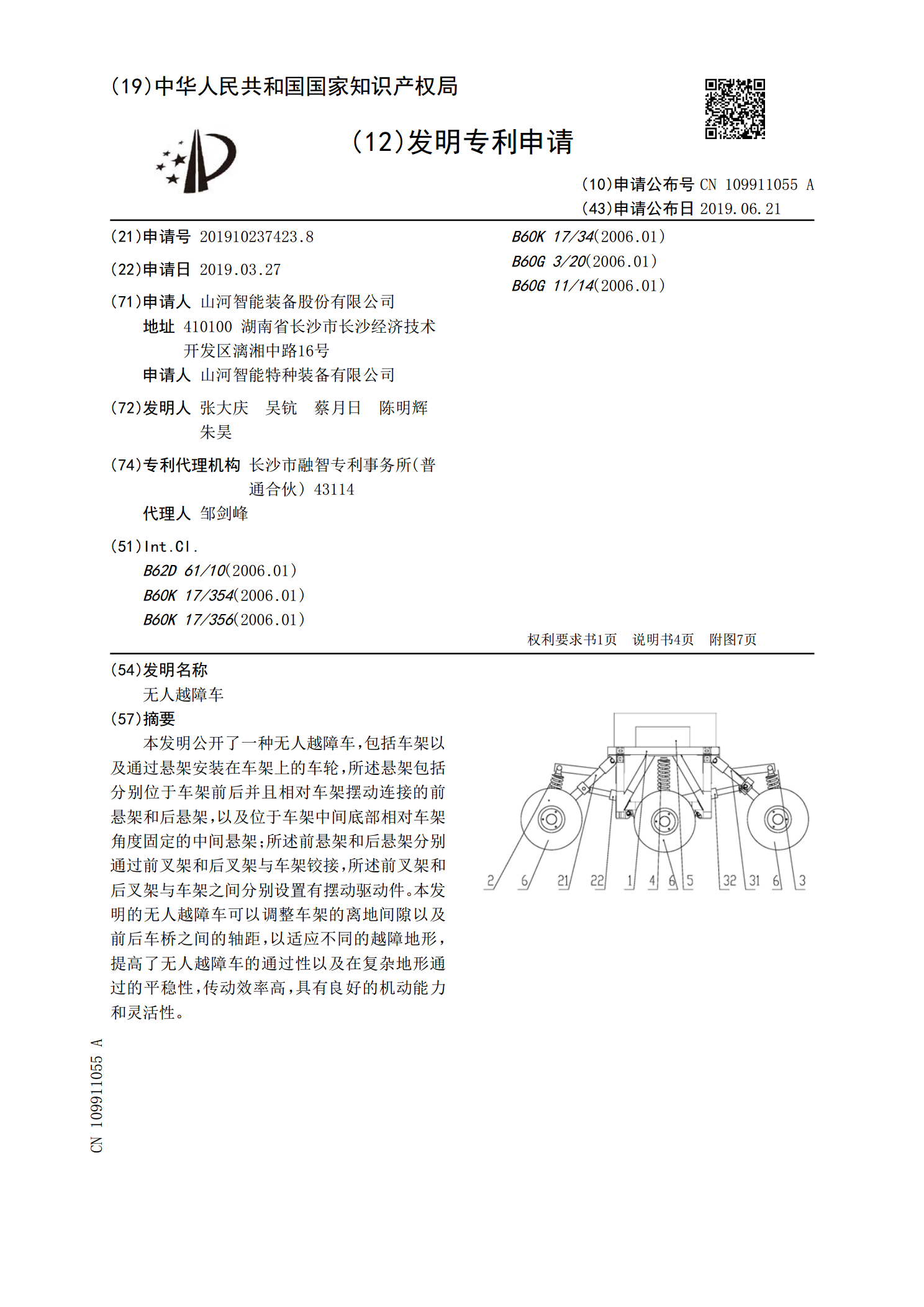
本发明公开了一种无人越障车,包括车架以及通过悬架安装在车架上的车轮,所述悬架包括分别位于车架前后并且相对车架摆动连接的前悬架和后悬架,以及位于车架中间底部相对车架角度固定的中间悬架;所述前悬架和后悬架分别通过前叉架和后叉架与车架铰接,所述前叉架和后叉架与车架之间分别设置有摆动驱动件。本发明的无人越障车可以调整车架的离地间隙以及前后车桥之间的轴距,以适应不同的越障地形,提高了无人越障车的通过性以及在复杂地形通过的平稳性,传动效率高,具有良好的机动能力和灵活性。

基于神经网络的无人车越障规划算法.pptx
基于神经网络的无人车越障规划算法目录添加章节标题神经网络算法概述神经网络的基本原理神经网络在无人驾驶中的应用越障规划算法的必要性基于神经网络的无人车越障规划算法原理算法的基本流程输入与输出变量神经网络结构与参数训练与优化方法算法实现与实验验证数据集的准备与预处理训练过程与模型评估实验结果与分析与其他算法的比较算法的优缺点与改进方向算法的优势与局限性可改进的方面与未来发展方向在实际应用中的注意事项无人车越障规划算法的应用前景在无人驾驶领域的应用前景对交通系统的影响与变革在其他领域的应用可能性THANKYOU

无人越障车驱动控制系统设计开发的任务书.docx
无人越障车驱动控制系统设计开发的任务书任务书项目名称:无人越障车驱动控制系统设计开发任务描述:本项目旨在设计并开发一款无人越障车驱动控制系统,实现对无人越障车的全方位控制并完成前进、后退、左右转弯等基本操作。系统功能:1.通过电机驱动,实现对车辆轮胎的控制。2.实现无线遥控控制无人越障车运行。3.实现传感器对车辆行驶环境的监测。4.实现对车辆的位置、速度等参数的掌控。5.提供语音提示和图像显示,增加系统的可操作性和安全性。任务目标:1.搭建可靠的车辆驱动控制系统,实现对车辆行驶方向的可掌控性。2.集成传感
智能越障车.pdf
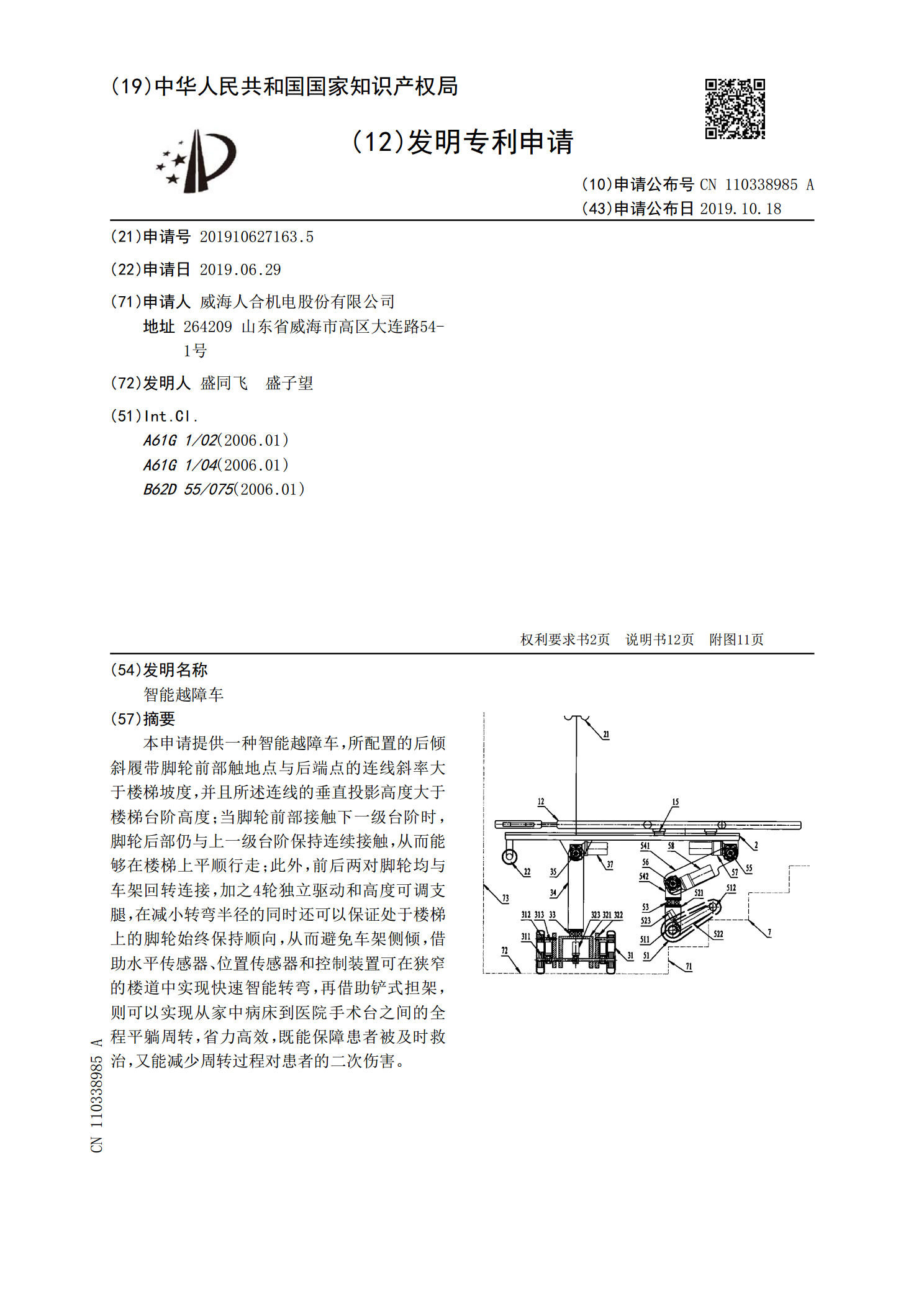
本申请提供一种智能越障车,所配置的后倾斜履带脚轮前部触地点与后端点的连线斜率大于楼梯坡度,并且所述连线的垂直投影高度大于楼梯台阶高度;当脚轮前部接触下一级台阶时,脚轮后部仍与上一级台阶保持连续接触,从而能够在楼梯上平顺行走;此外,前后两对脚轮均与车架回转连接,加之4轮独立驱动和高度可调支腿,在减小转弯半径的同时还可以保证处于楼梯上的脚轮始终保持顺向,从而避免车架侧倾,借助水平传感器、位置传感器和控制装置可在狭窄的楼道中实现快速智能转弯,再借助铲式担架,则可以实现从家中病床到医院手术台之间的全程平躺周转,省

仿生越障探测车.pdf
一种仿生越障探测车,由越障系统和探测系统组成。越障系统的箱体上固定有第一支架、第二支架,箱体两侧内部分别装有蓄电池、电路板,连杆通过第二连杆轴套、销轴连结在支架上,连接摆杆一端活动连接在连杆上,另一端支撑在中部轮胎上,电机通过电机轴、卡簧和第一连杆套轴连接车轮,箱体前部通过第一连杆、第二连杆、第三连杆连接转向电机,电机通过电机轴、轴承、卡簧、垫片与轮胎架相连接。探测系统的直流步进电机的前端固定装有探测头,电机活动连接直齿圆锥齿轮,角斜连杆连接直流步进电机和轴套,电机连杆通过螺钉与另一个轴套相连,多个上述结