
无人越障车驱动控制系统设计开发的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

无人越障车驱动控制系统设计开发的任务书.docx
无人越障车驱动控制系统设计开发的任务书任务书项目名称:无人越障车驱动控制系统设计开发任务描述:本项目旨在设计并开发一款无人越障车驱动控制系统,实现对无人越障车的全方位控制并完成前进、后退、左右转弯等基本操作。系统功能:1.通过电机驱动,实现对车辆轮胎的控制。2.实现无线遥控控制无人越障车运行。3.实现传感器对车辆行驶环境的监测。4.实现对车辆的位置、速度等参数的掌控。5.提供语音提示和图像显示,增加系统的可操作性和安全性。任务目标:1.搭建可靠的车辆驱动控制系统,实现对车辆行驶方向的可掌控性。2.集成传感
无人越障车.pdf
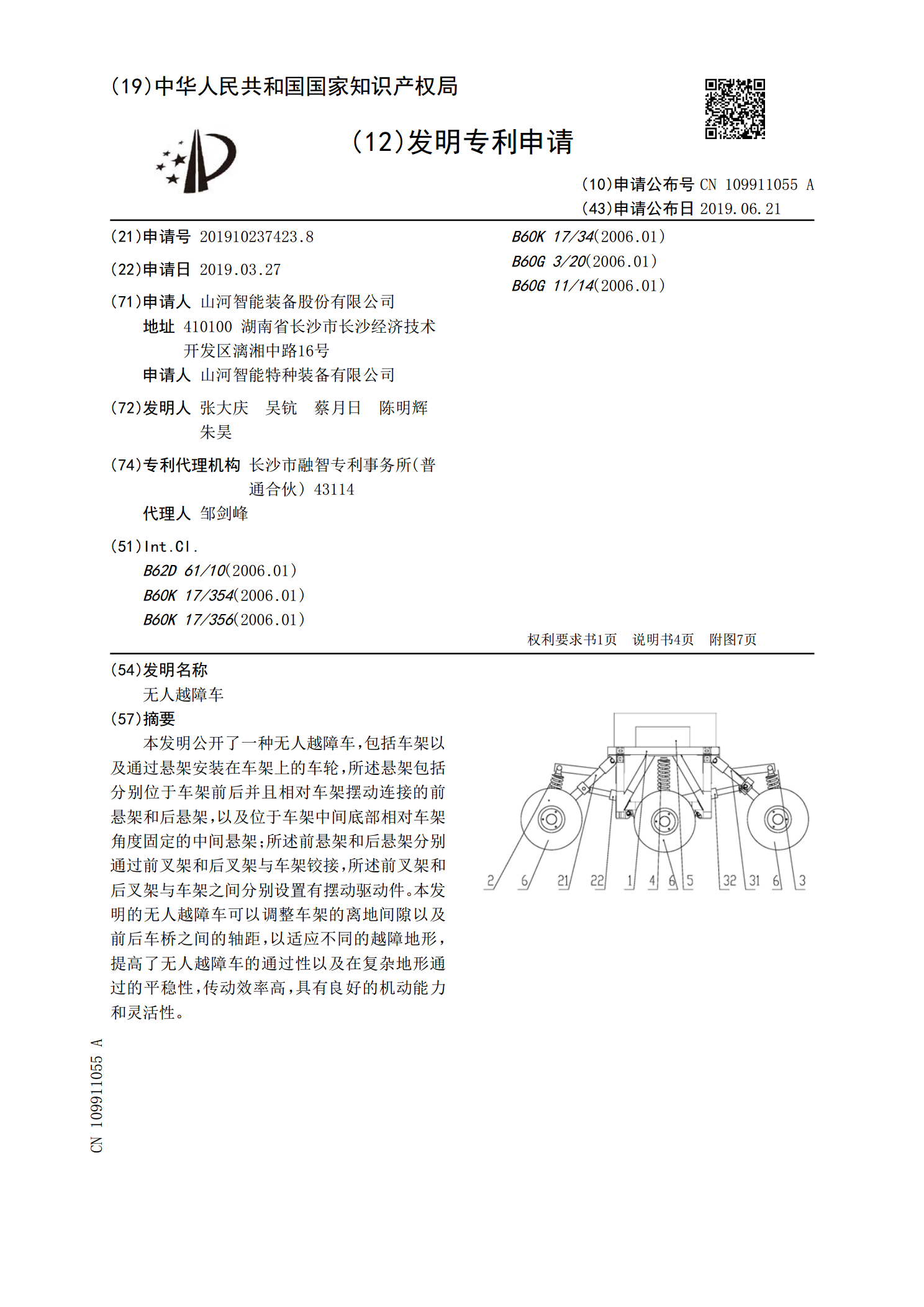
本发明公开了一种无人越障车,包括车架以及通过悬架安装在车架上的车轮,所述悬架包括分别位于车架前后并且相对车架摆动连接的前悬架和后悬架,以及位于车架中间底部相对车架角度固定的中间悬架;所述前悬架和后悬架分别通过前叉架和后叉架与车架铰接,所述前叉架和后叉架与车架之间分别设置有摆动驱动件。本发明的无人越障车可以调整车架的离地间隙以及前后车桥之间的轴距,以适应不同的越障地形,提高了无人越障车的通过性以及在复杂地形通过的平稳性,传动效率高,具有良好的机动能力和灵活性。

无人车控制系统设计与实现.pdf
无人车控制系统设计与实现随着科技的不断发展,人工智能技术在越来越多的领域得到了应用,其中一项受到广泛关注的领域就是无人驾驶技术。无人车是一种通过自主决策和控制实现无人驾驶的车辆。传统的汽车需要司机来操作,而无人车则能够通过搭载各种传感器和控制系统来自主实现驾驶。本文将介绍无人车控制系统的设计和实现。一、传感器与控制系统无人车通过搭载多种传感器,如激光雷达、摄像头、GPS等来获取周围环境的信息,并将这些信息传递给控制系统。传感器是无人车控制系统中最重要的组成部分之一,通过传感器获取到的信息,控制系统能够对车

基于神经网络的无人车越障规划算法.pptx
基于神经网络的无人车越障规划算法目录添加章节标题神经网络算法概述神经网络的基本原理神经网络在无人驾驶中的应用越障规划算法的必要性基于神经网络的无人车越障规划算法原理算法的基本流程输入与输出变量神经网络结构与参数训练与优化方法算法实现与实验验证数据集的准备与预处理训练过程与模型评估实验结果与分析与其他算法的比较算法的优缺点与改进方向算法的优势与局限性可改进的方面与未来发展方向在实际应用中的注意事项无人车越障规划算法的应用前景在无人驾驶领域的应用前景对交通系统的影响与变革在其他领域的应用可能性THANKYOU
越障车设计说明.doc
基于杠杆原理旳多用途越障装载车设计阐明书哈尔滨工业大学(威海)杜文灿肖晓飞2010年6月15日基于杠杆原理旳多用途越障装载车哈尔滨工业大学(威海)杜文灿肖晓飞作品内容简介我们通过试验设计了一套越障系统.为提高越障车旳越障能力,结合路况旳复杂环境,设计了一种杠杆式越障车.该车重要由车架、定轴齿轮啮合传动装置、棘轮机构、控制器、检测装置、电动马达、自动报警装置、电源、传动装置等部分构成.设计重点在定轴轮系啮合传动装置,该车重要考虑了提高车轮自身旳越障能力———采用了定轴齿轮啮合传动装置.该装置重要通过增长力臂