
仿生越障探测车.pdf

一吃****新冬

1/6

2/6

3/6
4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

仿生越障探测车.pdf
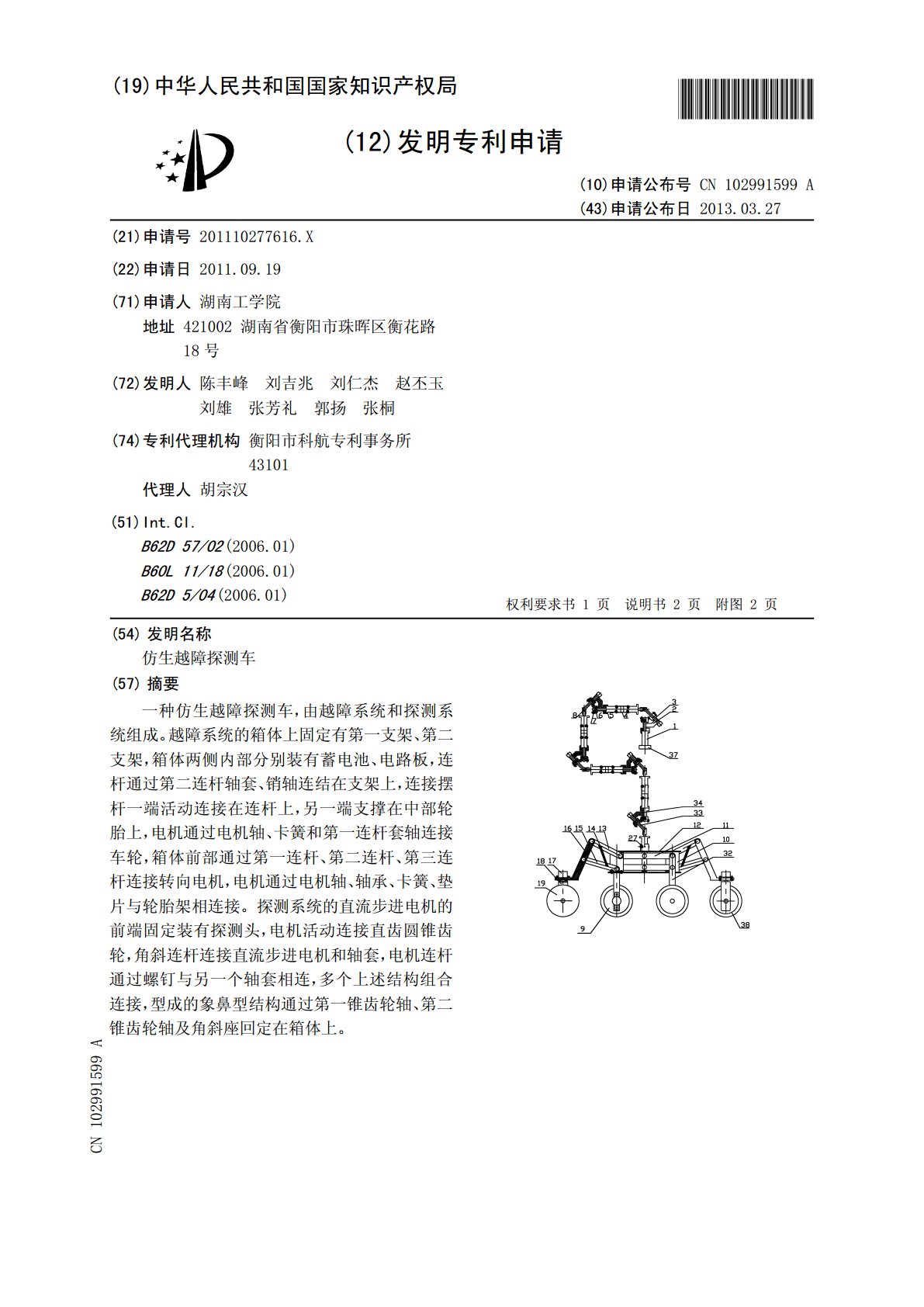
一种仿生越障探测车,由越障系统和探测系统组成。越障系统的箱体上固定有第一支架、第二支架,箱体两侧内部分别装有蓄电池、电路板,连杆通过第二连杆轴套、销轴连结在支架上,连接摆杆一端活动连接在连杆上,另一端支撑在中部轮胎上,电机通过电机轴、卡簧和第一连杆套轴连接车轮,箱体前部通过第一连杆、第二连杆、第三连杆连接转向电机,电机通过电机轴、轴承、卡簧、垫片与轮胎架相连接。探测系统的直流步进电机的前端固定装有探测头,电机活动连接直齿圆锥齿轮,角斜连杆连接直流步进电机和轴套,电机连杆通过螺钉与另一个轴套相连,多个上述结

一种火星越障探测车.pdf
一种火星越障探测车包括平台、两个机械臂、四个行走机构、两个太阳能电池板、旋转固定杆、摄像头组、第一伺服电机、第二伺服电机、第一电缸、第一电机座、第三伺服电机等;其特征在于:所述的平台的底部设置有四个第一伸缩套,并且每两个分别平行安装在平台的两侧,在每个第一伸缩套内分别安装有一个第一伸缩杆;所述的四个第三电缸的后端部分别安装在四个第一伸缩套上,另一端分别安装在四个第一伸缩杆上;本发明通过四个六缸球铰并联机构控制对四个行走机构进行多自由度的调节,结合每个外轮框上设置的三个轮子可以适应地形比较复杂的环境,从而更
一种具有越障功能的火星探测车.pdf
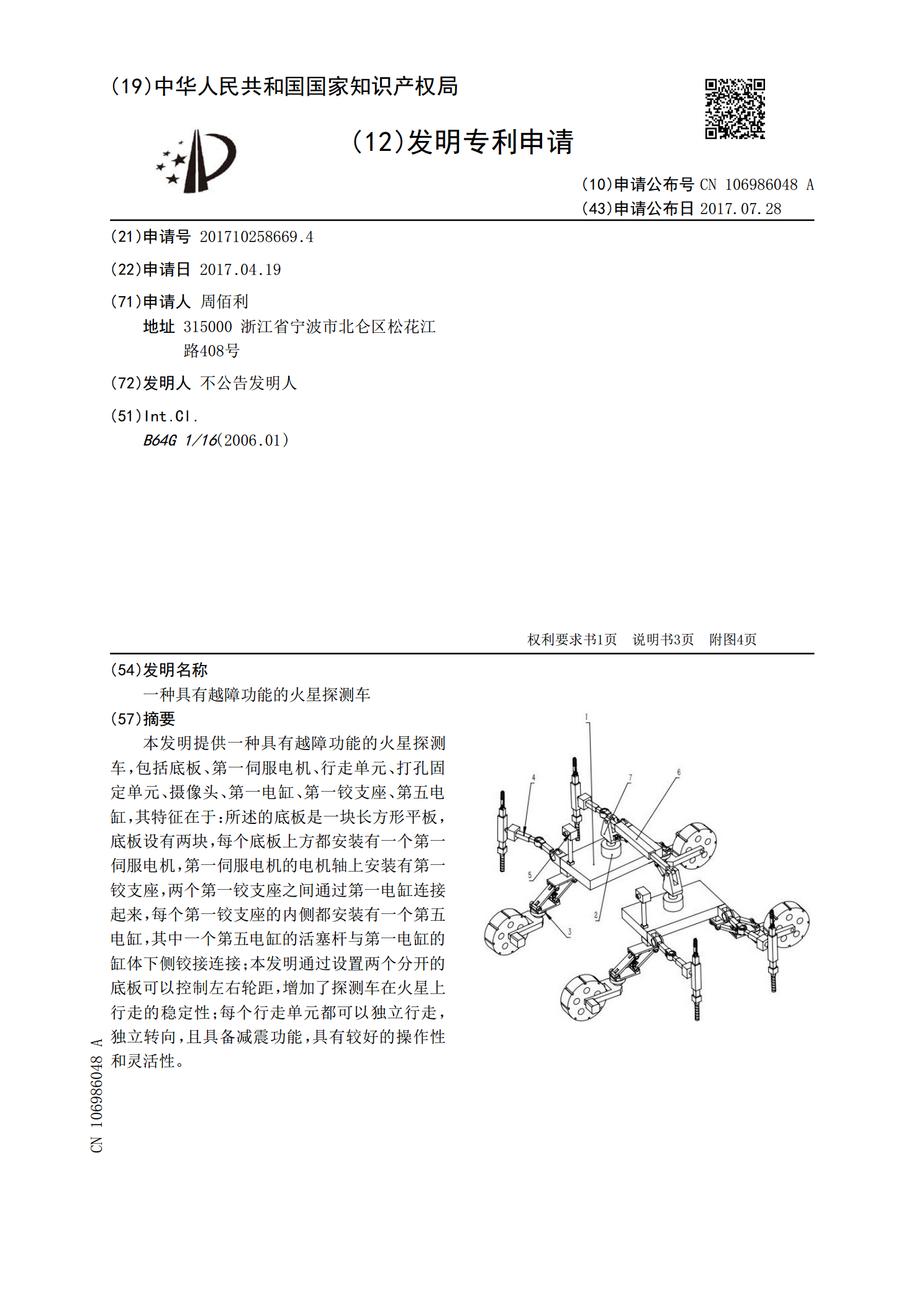
本发明提供一种具有越障功能的火星探测车,包括底板、第一伺服电机、行走单元、打孔固定单元、摄像头、第一电缸、第一铰支座、第五电缸,其特征在于:所述的底板是一块长方形平板,底板设有两块,每个底板上方都安装有一个第一伺服电机,第一伺服电机的电机轴上安装有第一铰支座,两个第一铰支座之间通过第一电缸连接起来,每个第一铰支座的内侧都安装有一个第五电缸,其中一个第五电缸的活塞杆与第一电缸的缸体下侧铰接连接;本发明通过设置两个分开的底板可以控制左右轮距,增加了探测车在火星上行走的稳定性;每个行走单元都可以独立行走,独立转
智能越障车.pdf
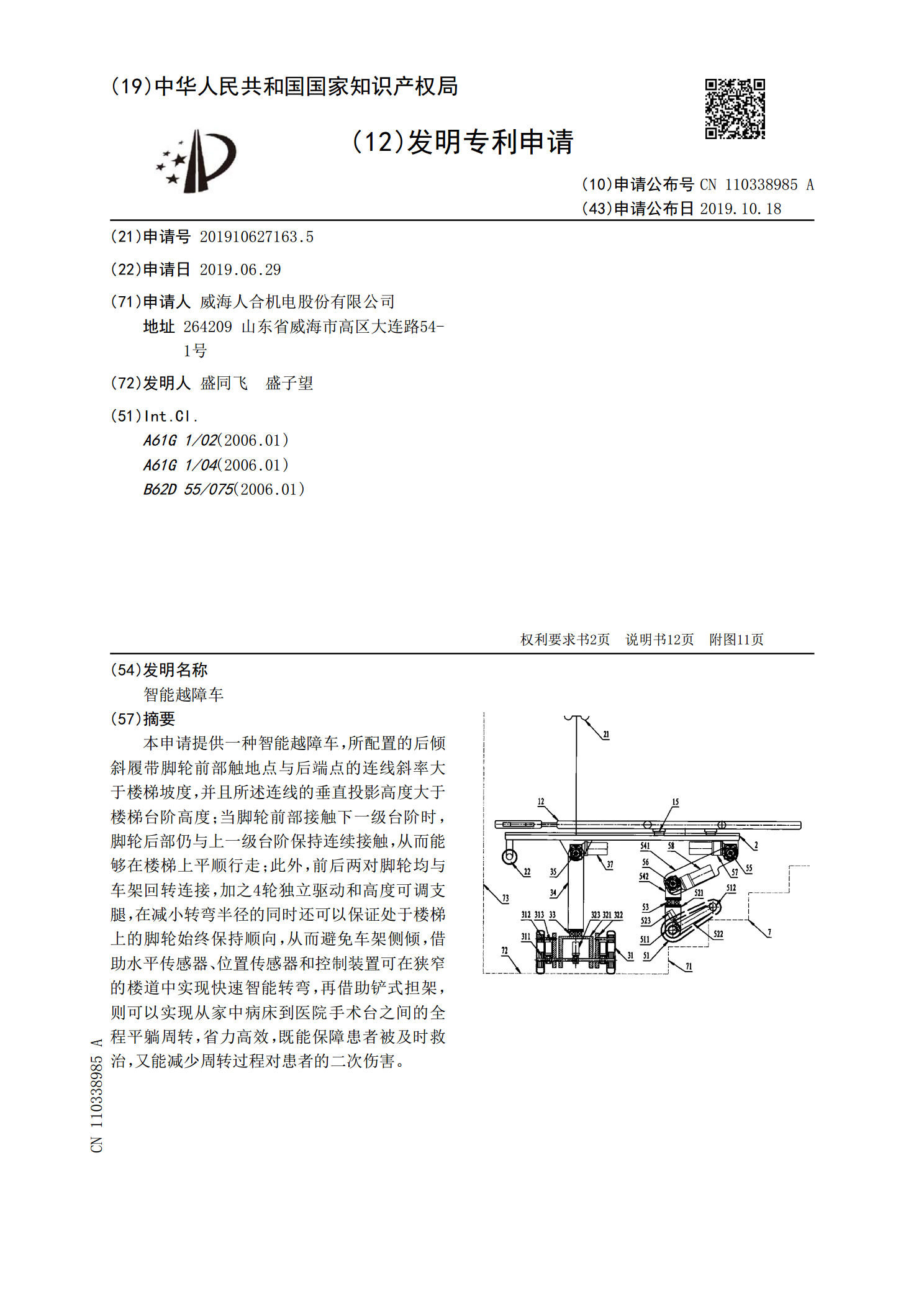
本申请提供一种智能越障车,所配置的后倾斜履带脚轮前部触地点与后端点的连线斜率大于楼梯坡度,并且所述连线的垂直投影高度大于楼梯台阶高度;当脚轮前部接触下一级台阶时,脚轮后部仍与上一级台阶保持连续接触,从而能够在楼梯上平顺行走;此外,前后两对脚轮均与车架回转连接,加之4轮独立驱动和高度可调支腿,在减小转弯半径的同时还可以保证处于楼梯上的脚轮始终保持顺向,从而避免车架侧倾,借助水平传感器、位置传感器和控制装置可在狭窄的楼道中实现快速智能转弯,再借助铲式担架,则可以实现从家中病床到医院手术台之间的全程平躺周转,省
无人越障车.pdf
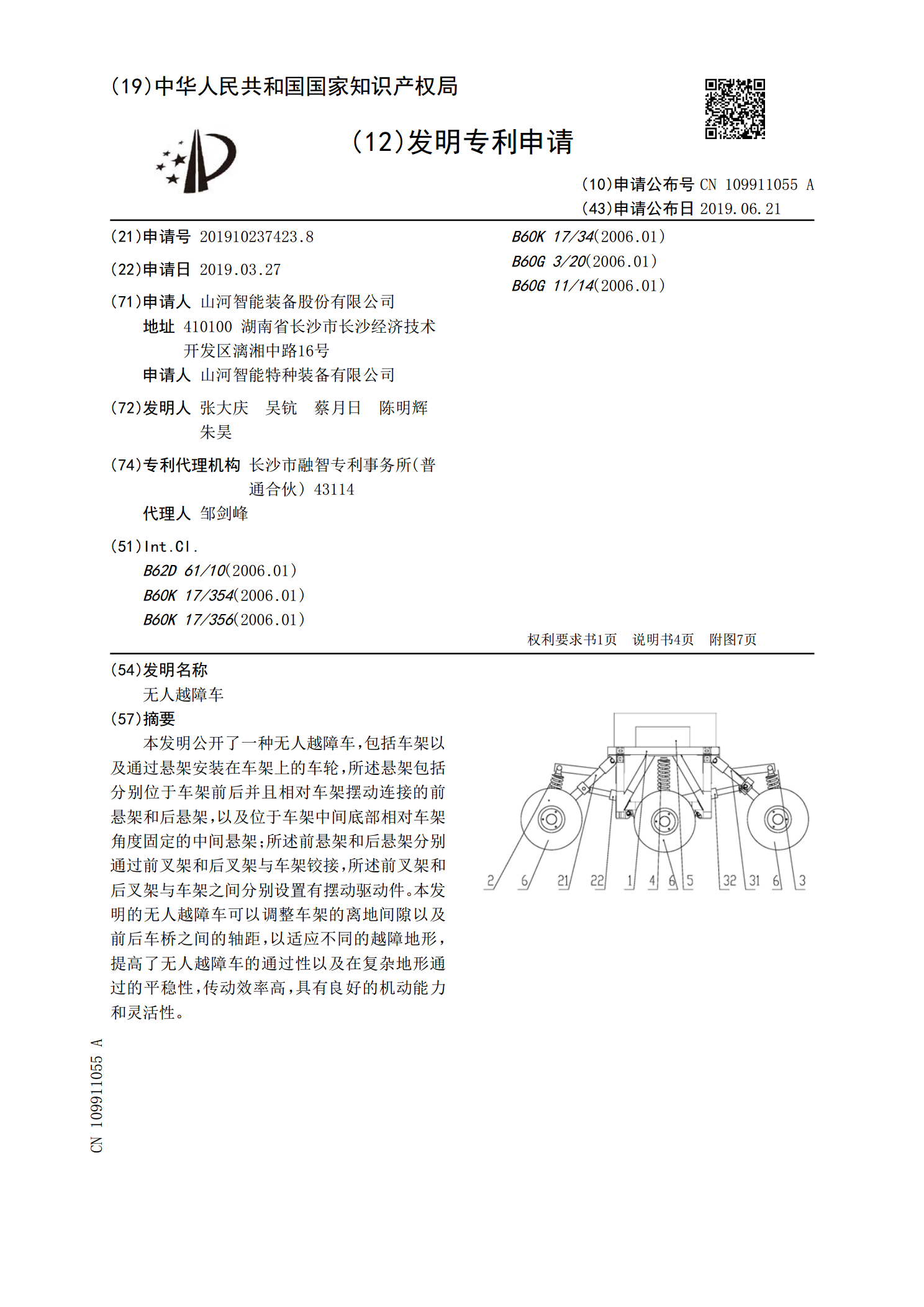
本发明公开了一种无人越障车,包括车架以及通过悬架安装在车架上的车轮,所述悬架包括分别位于车架前后并且相对车架摆动连接的前悬架和后悬架,以及位于车架中间底部相对车架角度固定的中间悬架;所述前悬架和后悬架分别通过前叉架和后叉架与车架铰接,所述前叉架和后叉架与车架之间分别设置有摆动驱动件。本发明的无人越障车可以调整车架的离地间隙以及前后车桥之间的轴距,以适应不同的越障地形,提高了无人越障车的通过性以及在复杂地形通过的平稳性,传动效率高,具有良好的机动能力和灵活性。