
一种绳索驱动三自由平动并联机器人的遥操作装置.pdf

萌运****魔王

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种绳索驱动三自由平动并联机器人的遥操作装置.pdf
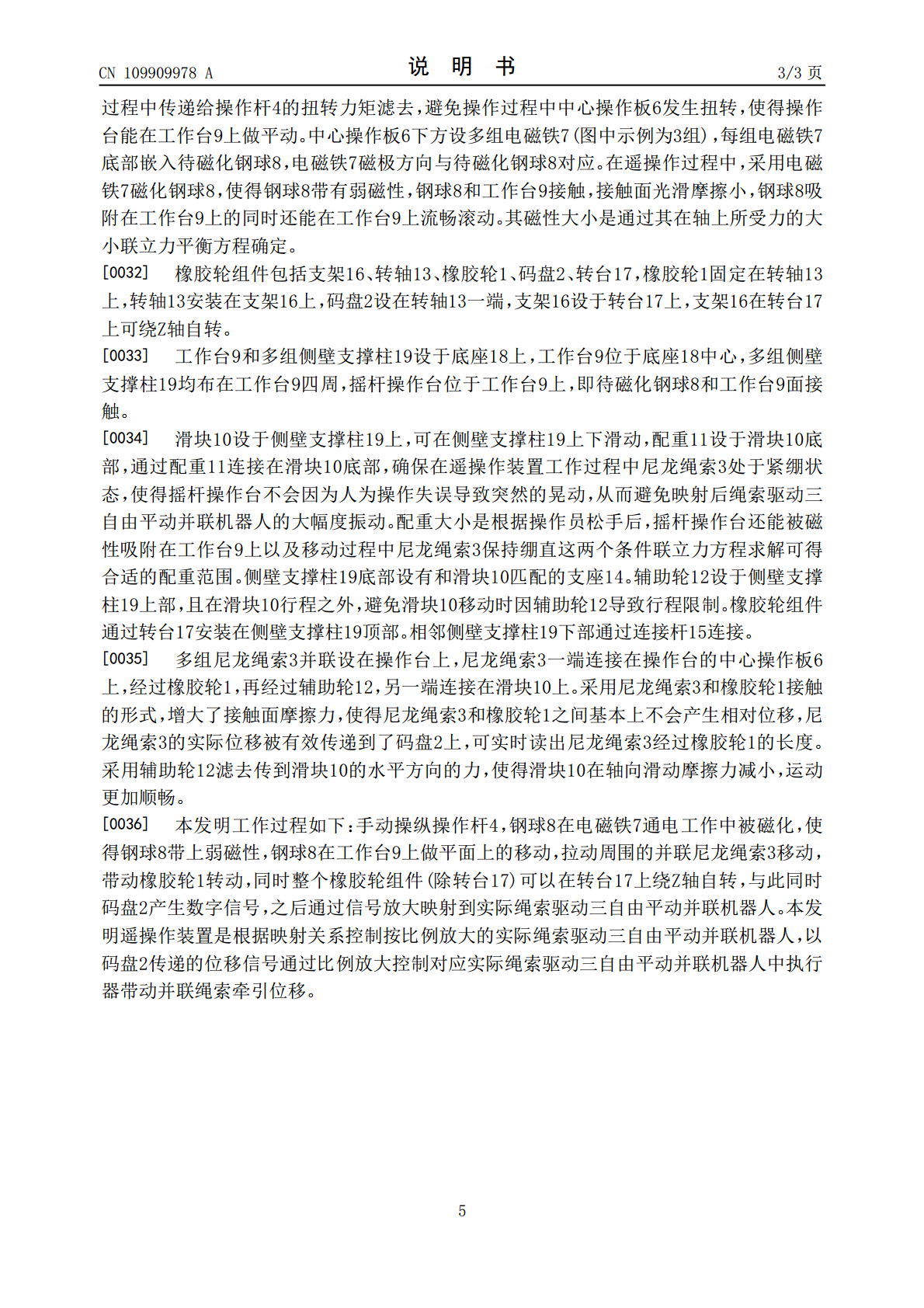
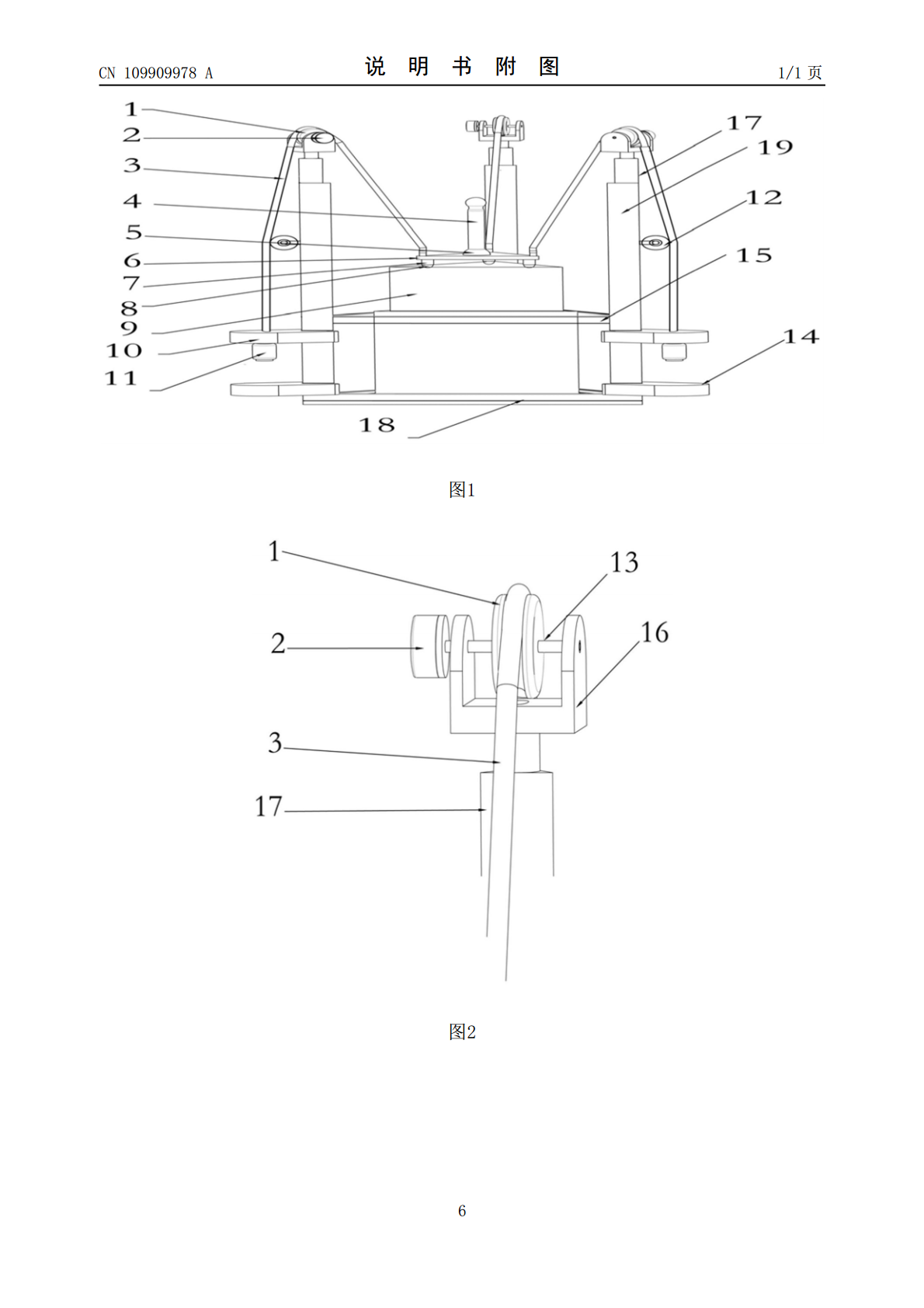
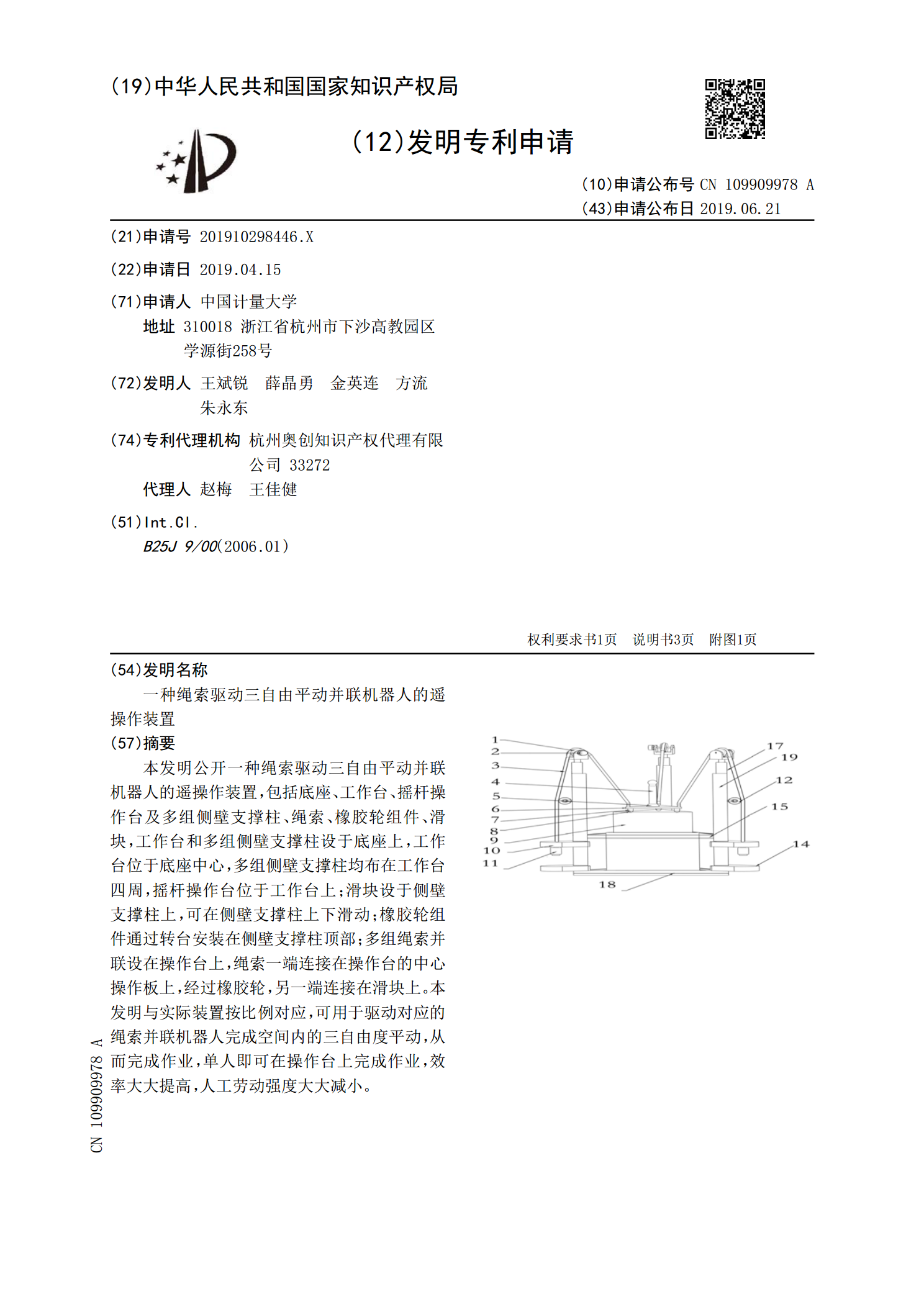
本发明公开一种绳索驱动三自由平动并联机器人的遥操作装置,包括底座、工作台、摇杆操作台及多组侧壁支撑柱、绳索、橡胶轮组件、滑块,工作台和多组侧壁支撑柱设于底座上,工作台位于底座中心,多组侧壁支撑柱均布在工作台四周,摇杆操作台位于工作台上;滑块设于侧壁支撑柱上,可在侧壁支撑柱上下滑动;橡胶轮组件通过转台安装在侧壁支撑柱顶部;多组绳索并联设在操作台上,绳索一端连接在操作台的中心操作板上,经过橡胶轮,另一端连接在滑块上。本发明与实际装置按比例对应,可用于驱动对应的绳索并联机器人完成空间内的三自由度平动,从而完成作

一种绳索驱动装置及绳驱并联机器人.pdf
本发明涉及机器人技术领域,公开了一种绳索驱动装置以及并联绳驱机器人。本发明的绳索驱动装置包括主体框架、固设于所述主体框架上的驱动装置、与所述驱动装置连接并同步转动的丝杆与铰轮、与所述丝杆螺纹连接的导绳滑块以及一端固定设于所述铰轮的上的控制绳索;其中,所述铰轮上设有供所述控制绳索绕卷的螺纹槽,所述导绳滑块上设有第一导绳滑轮,所述第一导绳滑轮将所述控制绳索张紧并使所述控制绳索定向绕入所述螺纹槽内。本发明的并联绳驱机器人包括机器人主体以及固设于机器人主体上的绳索驱动装置。本发明的绳索驱动装置以及并联绳驱机器人能
一种绳索牵引并联机器人的绳索共面装置.pdf
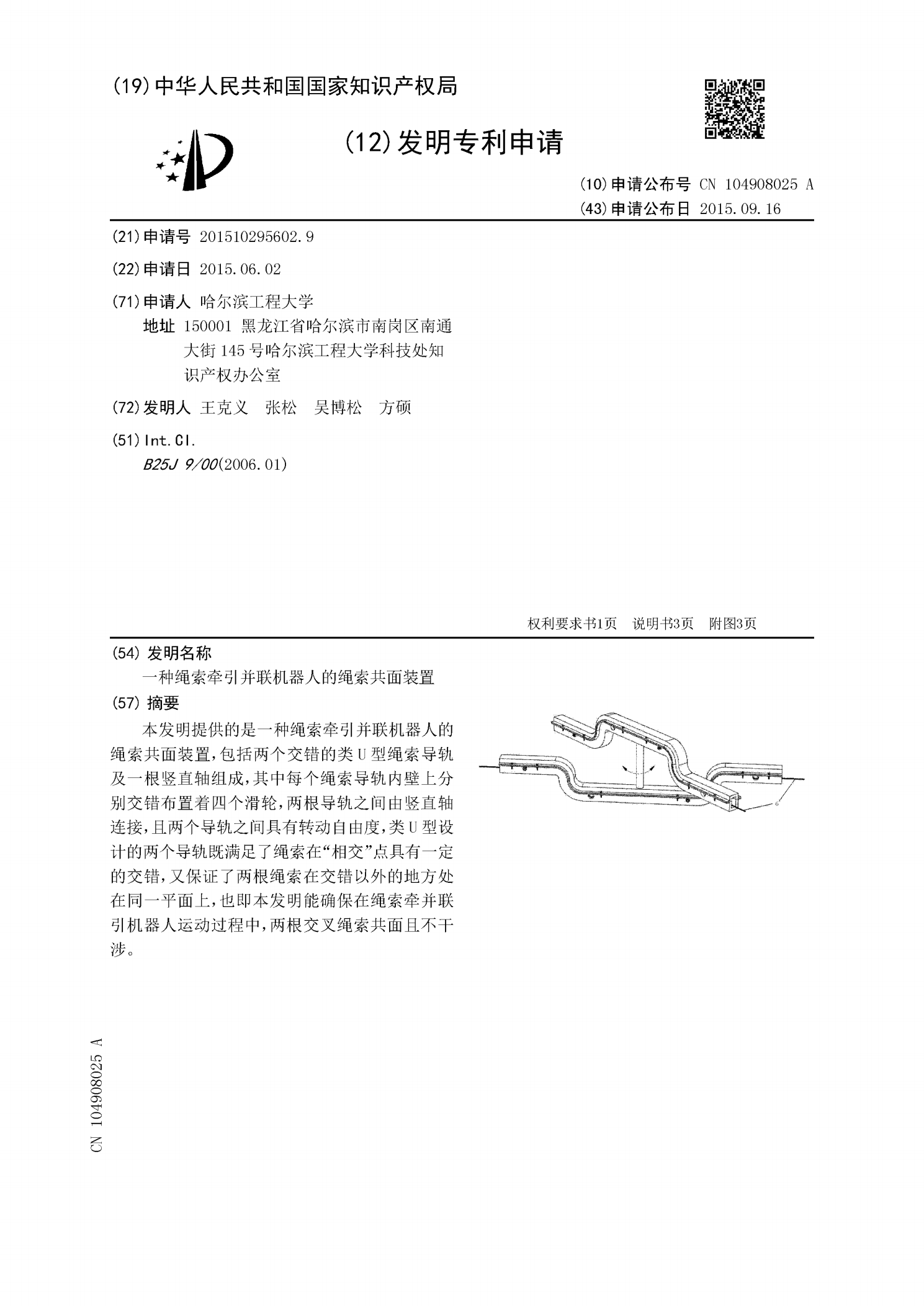
本发明提供的是一种绳索牵引并联机器人的绳索共面装置,包括两个交错的类U型绳索导轨及一根竖直轴组成,其中每个绳索导轨内壁上分别交错布置着四个滑轮,两根导轨之间由竖直轴连接,且两个导轨之间具有转动自由度,类U型设计的两个导轨既满足了绳索在“相交”点具有一定的交错,又保证了两根绳索在交错以外的地方处在同一平面上,也即本发明能确保在绳索牵并联引机器人运动过程中,两根交叉绳索共面且不干涉。
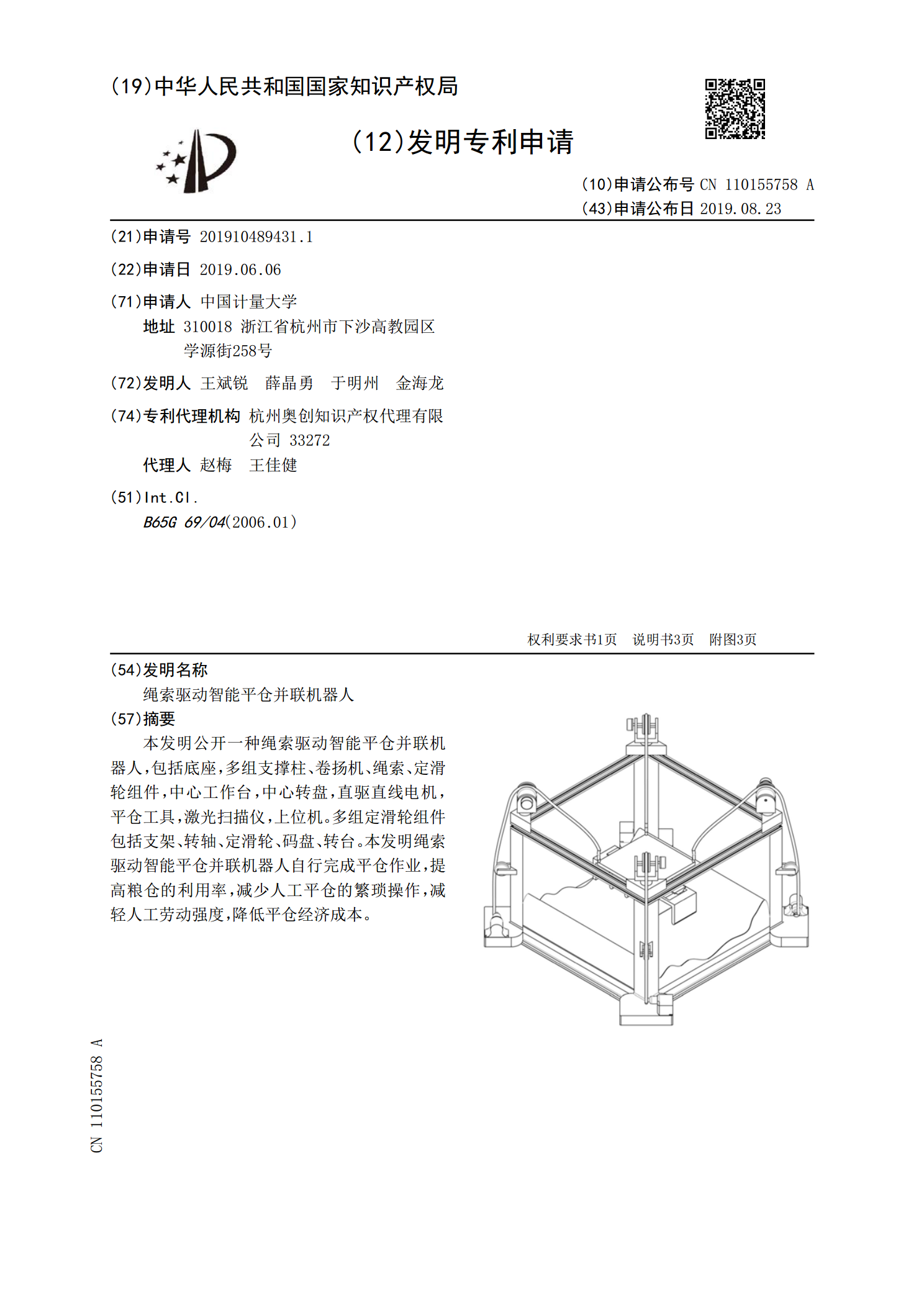
绳索驱动智能平仓并联机器人.pdf
本发明公开一种绳索驱动智能平仓并联机器人,包括底座,多组支撑柱、卷扬机、绳索、定滑轮组件,中心工作台,中心转盘,直驱直线电机,平仓工具,激光扫描仪,上位机。多组定滑轮组件包括支架、转轴、定滑轮、码盘、转台。本发明绳索驱动智能平仓并联机器人自行完成平仓作业,提高粮仓的利用率,减少人工平仓的繁琐操作,减轻人工劳动强度,降低平仓经济成本。
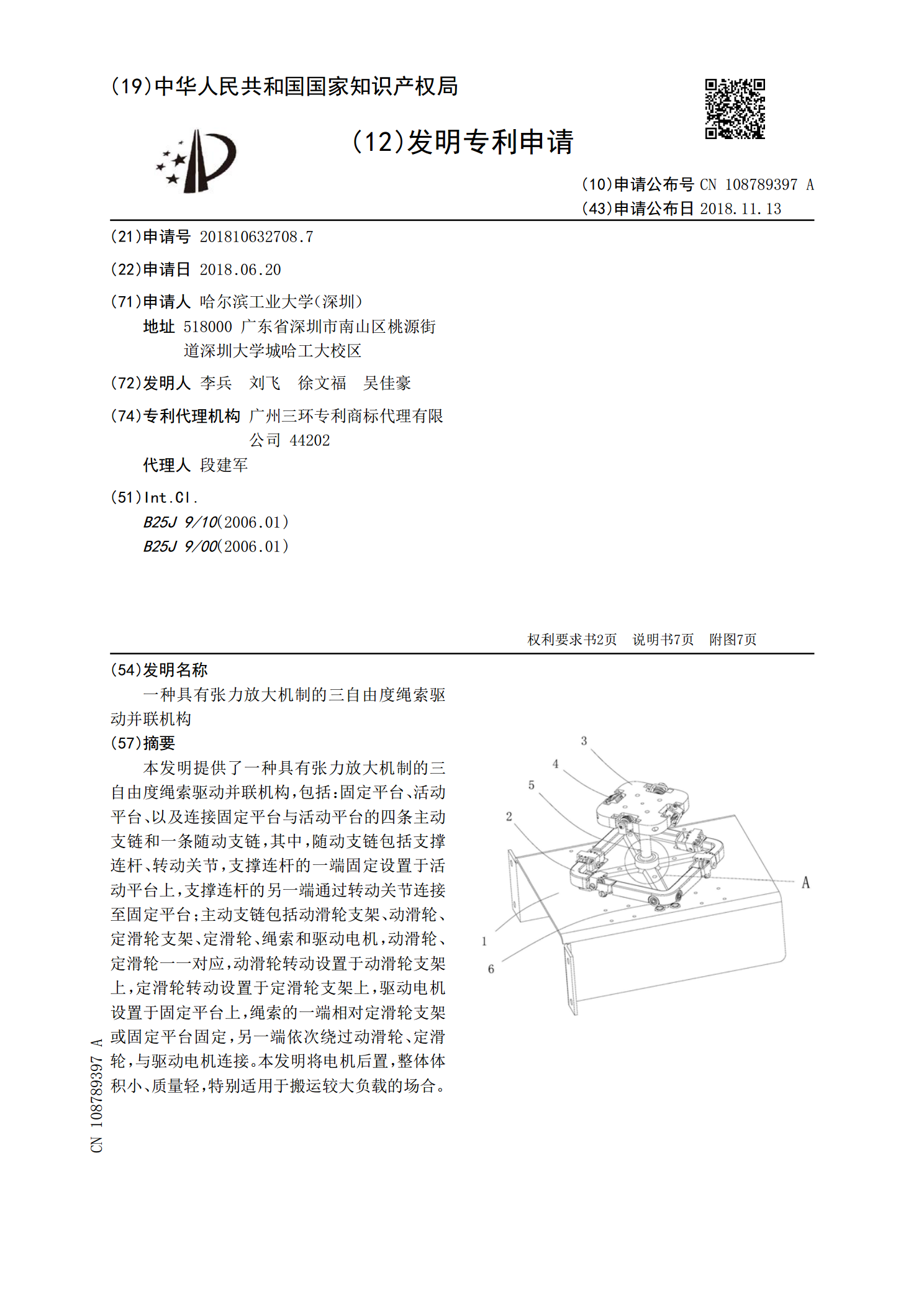
一种具有张力放大机制的三自由度绳索驱动并联机构.pdf
本发明提供了一种具有张力放大机制的三自由度绳索驱动并联机构,包括:固定平台、活动平台、以及连接固定平台与活动平台的四条主动支链和一条随动支链,其中,随动支链包括支撑连杆、转动关节,支撑连杆的一端固定设置于活动平台上,支撑连杆的另一端通过转动关节连接至固定平台;主动支链包括动滑轮支架、动滑轮、定滑轮支架、定滑轮、绳索和驱动电机,动滑轮、定滑轮一一对应,动滑轮转动设置于动滑轮支架上,定滑轮转动设置于定滑轮支架上,驱动电机设置于固定平台上,绳索的一端相对定滑轮支架或固定平台固定,另一端依次绕过动滑轮、定滑轮,与